Роботизированная коробка передач DSG, или новое это хорошо забытое старое.
Роботизированная коробка передач DSG (Direct Shift Gearbox). Это коробка передач прямого переключения. В настоящее время она является самой совершенной автоматизированной коробкой, устанавливаемой на массовые модели легковых автомобилей – так, или примерно так начинаются все описания данного агрегата во многих, если не сказать во всех, рекламных источниках. Давайте разберемся, что это такое и так ли это на самом деле.
Эту коробку изобрел пионер автомобилестроения Адольф Кегресс (Adolphe Kegresse) (1879-1943), больше известный изобретением полугусеничных машин, оснащенных резиновыми гусеницами, которые помогают ездить по различным формам рельефа. Кстати, интересный факт, Адольф Кегресс с 1904 года работал в России, организовывая там автомобильную почту. С 1906 года А. Кегресс стал техническим директором гаража царя Николая II, а после – личным шофером императора.
Так вот, в 1939 году Кегресс впервые сформулировал идею КПП с двойным сцеплением, которую он надеялся воплотить в легендарном Citroen Traction. К сожалению, неблагоприятные условия бизнеса, а затем вторая мировая война, не позволили претворить идею в жизнь.
К идее создания КПП с двойным сцеплением вернулись только в 80-х годах прошлого века разработчики спортивных болидов. Они смогли автоматически переключать механические КПП. В автомобиле педалью сцепления и кулисой переключения передач управляет электроника, все действия совершаются электромагнитными или гидравлическими механизмами.
Давайте разберемся, как это работает. Для того, чтобы понять, как это работает, необходимо вспомнить, как работает механика.
Итак, как работает механическая КПП? Прежде чем переключить передачу с помощью кулисы переключения передач, необходимо выжать педаль сцепление, которая отсоединяет двигатель от коробки передач и прекращает подачу силового потока к коробке. Когда водитель выбирает нужную передачу с помощью кулисы, зубчатая муфта перемещается от одной шестерни к другой, синхронизаторы выравнивают скорость вращения муфты, после чего передача безударно включается. После того, как шестерня пришла в движение, необходимо отпустить педаль сцепления, после чего происходит повторное соединение двигателя с трансмиссией и посылает крутящий момент на колеса. Таким образом, в обычной механической коробке передач, поток мощности от двигателя к колесам при переключении скоростей прерывается. Это вызывает толчок переключения передачи или прерывание крутящего момента. В случаях неправильного, или несвоевременного включения передачи, автомобиль может заметно подергиваться, или как говорят в народе – «козлить».
Когда водитель выбирает нужную передачу с помощью кулисы, зубчатая муфта перемещается от одной шестерни к другой, синхронизаторы выравнивают скорость вращения муфты, после чего передача безударно включается. После того, как шестерня пришла в движение, необходимо отпустить педаль сцепления, после чего происходит повторное соединение двигателя с трансмиссией и посылает крутящий момент на колеса. Таким образом, в обычной механической коробке передач, поток мощности от двигателя к колесам при переключении скоростей прерывается. Это вызывает толчок переключения передачи или прерывание крутящего момента. В случаях неправильного, или несвоевременного включения передачи, автомобиль может заметно подергиваться, или как говорят в народе – «козлить».
Коробка DSG работает по-другом, она объединяет в одном корпусе две механические коробки передач, одну для четных скоростей, а другую для нечетных, и каждая из которых оснащена своим сцеплением, Но зачем это нужно? Оказывается, для того, чтобы включать две передачи одновременно!
Пока автомобиль разгоняется на четной скорости, шестерни следующей, нечетной, уже находятся в зацеплении. Когда обороты двигателя достигают точки включения следующей передачи, сцепление четной передачи размыкается, а нечетной одновременно замыкается, при этом передача тяги между коробками происходит без разрыва потока мощности, а смена скорости получается быстрой и почти незаметной. И все это при минимальных потерях энергии – будучи производной от обычной “механики” коробка наследует и высокую эффективность передачи мощности. Управляется все это автоматикой, поэтому в системе отсутствует педаль сцепления, как таковая, и ручка управления КПП такая, как у автоматической коробки.
Когда обороты двигателя достигают точки включения следующей передачи, сцепление четной передачи размыкается, а нечетной одновременно замыкается, при этом передача тяги между коробками происходит без разрыва потока мощности, а смена скорости получается быстрой и почти незаметной. И все это при минимальных потерях энергии – будучи производной от обычной “механики” коробка наследует и высокую эффективность передачи мощности. Управляется все это автоматикой, поэтому в системе отсутствует педаль сцепления, как таковая, и ручка управления КПП такая, как у автоматической коробки.
“Вот она, идеальная трансмиссия”- воскликнет восторженный читатель, но…
Как говорил известный персонаж товарищ Саахов из Кавказской пленницы – “э нет… тарапица не надо”.
Коробка DSG, как уже было сказано выше, управляется электроникой, и при наборе скорости компьютер почти мгновенно переключает передачи, экономя топливо, сохраняя динамику и сглаживая рывки, потому что сразу после включения, например, четвертой передачи он готов включить пятую. А если Вы в процессе разгона решили притормозить, а такое в пробках и на трассе бывает часто? А система управления об этом не знала и готовилась включить передачу выше? Ей нужно гораздо больше времени для отключения более высокой передачи и подготовки к включении более низкой передачи. На это уходит уже не 100 мс, а до полусекунды. Вы скажете, “Ну и что этого и не заметишь”, и будете правы, при торможении этого практически не заметно, но автоматам такое угадывание не свойственно. Это минус.
А если Вы в процессе разгона решили притормозить, а такое в пробках и на трассе бывает часто? А система управления об этом не знала и готовилась включить передачу выше? Ей нужно гораздо больше времени для отключения более высокой передачи и подготовки к включении более низкой передачи. На это уходит уже не 100 мс, а до полусекунды. Вы скажете, “Ну и что этого и не заметишь”, и будете правы, при торможении этого практически не заметно, но автоматам такое угадывание не свойственно. Это минус.
Не всегда удается обеспечить и низкие потери энергии. Проблема в том, что сухие сцепления (такие же, как и у ручных коробок) в DSG трансмиссиях могут перегреваться, поэтому в моделях, рассчитанных на мощные моторы, вместо них применяются пакеты фрикционов, работающие в масле. Они лучше держат нагрузки, но из-за большего проскальзывания и гидродинамических потерь эффективность передачи мощности снижается до 96%, в то время как ручные коробки и их роботизированные версии достигают величины в 98-99%. Впрочем, это, конечно, лучше обычного “автомата” с его 91-94%. Разработчики заявляют, что коробка DSG экономит до 10% топлива. Ой, как я сомневаюсь. Несколько процентов – да, и это безусловно радует.
Впрочем, это, конечно, лучше обычного “автомата” с его 91-94%. Разработчики заявляют, что коробка DSG экономит до 10% топлива. Ой, как я сомневаюсь. Несколько процентов – да, и это безусловно радует.
Неоспоримым минусом является стоимость коробки и огромные проблемы с ремонтопригодностью. В связи с чем, возникает необходимость правильного обслуживания КПП и своевременной замены масла. Так как это, как не крути, рекламная статья, не примену возможностью обратить Ваше внимание, что компания North Sea Lubricants для таких коробок производит специальное масло ATF POWER DSG.
Так почему же коробки передач DSG стали так популярны? Ведь по каждому из параметров обязательно находится какой-то более подходящий тип трансмиссии. А секрет заключается в том, что, не являясь лидером в отдельных номинациях, эти коробки, тем не менее, совместили в себе удачный набор характеристик: достаточно эффективные, относительно недорогие, вполне комфортные и довольно быстрые.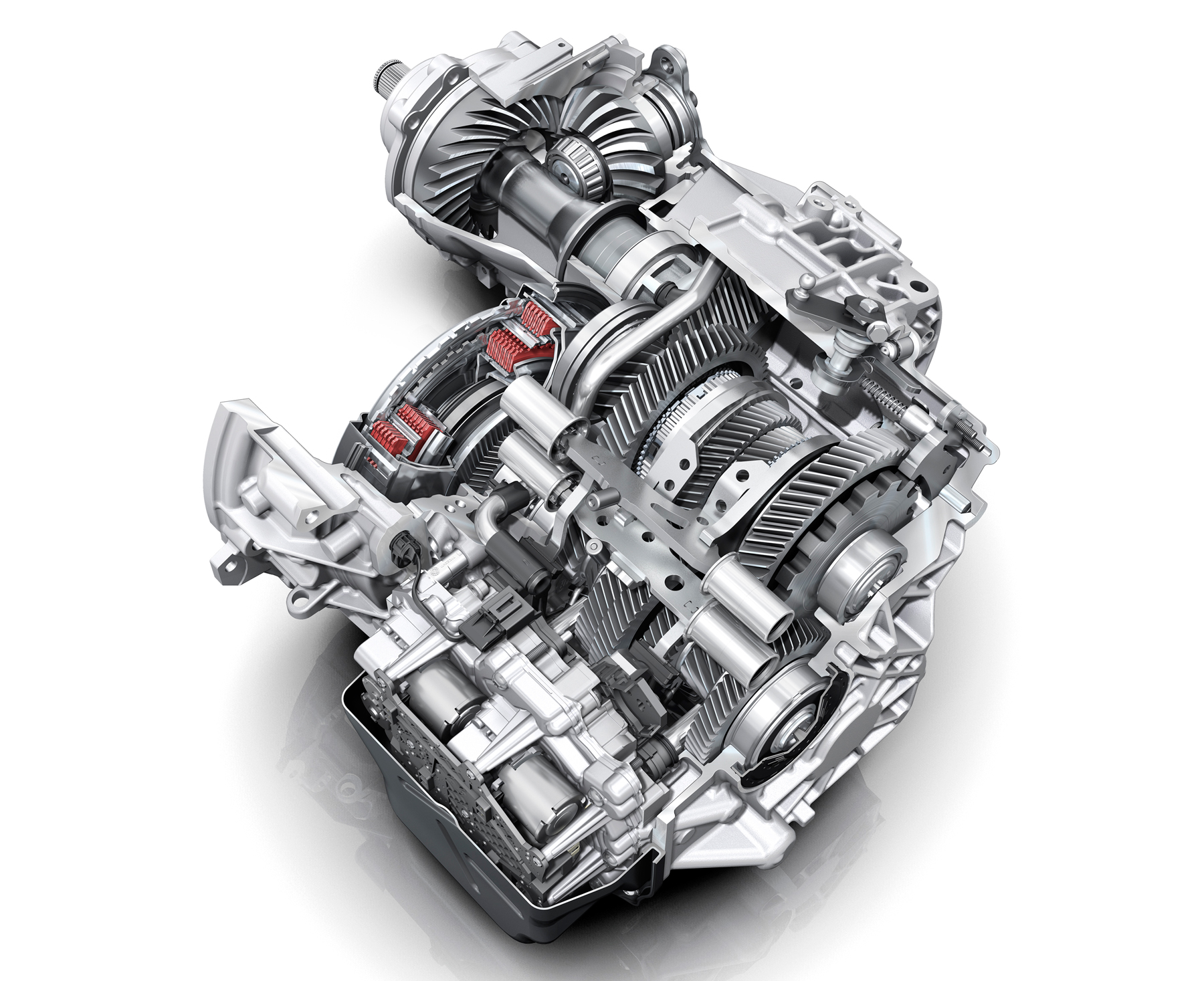 Золотая середина.
Золотая середина.
Катайтесь на машинах с коробками DSG и получайте от этого удовольствие.
Минусы и плюсы роботизированной коробки передач
Одним из факторов приобретения автомобиля является не только внешний вид, но и его “начинка”. Популярным механизмом для изменения передаточного числа является “робот”. Но минусы роботизированной коробки передач не позволяют производителям всегда устанавливать такую конфигурацию трансмиссии. Разбираем, чем отличается обучение вождению на автомобилях с роботизированной коробкой передач.
Что такое роботизированная коробка передач
Что значит роботизированная коробка передач – это часть трансмиссии, конструкция которой внешне не отличается от МКП, но при этом управляется при помощи автоматической системы, которая не требует вмешательства водителя в процесс работы устройства. Из-за возможности работы полностью в автоматическом режиме РКПП путают с АКПП, хотя они имеют важные конструкционные отличия. Поэтому отличается то, как пользоваться роботизированной коробкой передач, и как автоматической.
Поэтому отличается то, как пользоваться роботизированной коробкой передач, и как автоматической.
Также имеется внешнее сходство между двумя типами коробок: автомобиль не оснащен рычагом переключения передач, также отсутствует третья педаль – сцепление. Переключение полностью осуществляется без участия водителя.
Различие между АКПП и РКПП
Несмотря на общую цель – избавить водителя от необходимости осуществления механических действий, коробки имеют разную конструкцию и отличаются в эксплуатации и обслуживании. Роботизированная коробка передач – отличия от автоматической:
- АКПП требует большого количества жидкости ATF для правильного функционирования. РКПП тоже нуждается в смазке, для чего используется масло, но требуется его в несколько раз меньше.
- АКПП обеспечивает большую мягкость и плавность переключения по сравнению с РКПП, что обуславливается принципом работы роботизированной коробки передач.
- РКПП позволяет уменьшить расход топлива, при этом поддерживать динамичное движение.
 Причины этому: большая масса “автомата” и меньшая скорость переключения.
Причины этому: большая масса “автомата” и меньшая скорость переключения. - Фрикционы имеют более долгий срок службы по сравнению с диском сцепления.
- “Робот” позволяет вручную поднимать и опускать передаточное число, если водитель переходит на ручное управление. “Автомат” не дает водителю такой возможности.
 Причины этому: большая масса “автомата” и меньшая скорость переключения.
Причины этому: большая масса “автомата” и меньшая скорость переключения.Дополнительное отличие является следствием более особенностей конструкции “автомата” – высокая стоимость технического обслуживания.
Принцип работы РКПП
Перед покупкой автомобиля нужно понять, что это такое – роботизированная коробка передач, и как она сконструирована. Механическая коробка передач имеет диск сцепления с маховиком, всей этой конструкцией управляется робот. Электрический блок управления работает по алгоритму, заложенному в загруженную прошивку “мозгов”, подавая команды на сервоприводы в соответствии с показаниями датчиков. Именно от прошивки зависит, насколько динамичнее и комфортнее будет езда в автомобиле. Поэтому после обновления “мозгов” автомобиль может сильно изменить свое поведение.
Как работает роботизированная коробка передач:
- Нажимается педаль газа.
- Увеличиваются обороты двигателя, автомобиль разгоняется.
- Когда достигаются определенные показатели скорости и оборотов двигателя, срабатывают актуаторы сцепления и вилки переключения.
- “Робот” повышает передачу.
Процесс будет повторяться, пока автомобиль не достигнет своего предела по количеству доступных передач. При торможении система работает аналогичным образом, только передаточные числа сменяются в обратную сторону.
Плюсы и минусы РКПП
Как и у любой другой силовой конструкции, плюсы и минусы роботизированной коробки передач определяют целевого владельца автомобилей с такой системой управления.
Плюсы:
- Время разгона максимально приближено к тому, которое можно получить при идеальном переключении на МКПП.
- Меньшая стоимость ремонта и обслуживания по сравнению с АКПП.
- Увеличенный срок эксплуатации диска сцепления при сравнении с МКПП.
- Низкий расход топлива.
- Меньший процент износа в ходе эксплуатации по сравнению с ручным управлением.

Минусы:
- Электронный блок управления не умеет самостоятельно реагировать на экстремальные ситуации на дороге, поэтому водитель должен быть готов экстренно разогнаться или затормозить.
- Коробка может быть спроектирована так, что при переключении передаточных чисел будут ощущаться рывки.
- “Робот” комфортнее работает на длинных передачах.
- Движения по пробкам “убивает” РКПП, узлы и механизмы начинают раньше приходить в негодность.
- Для корректной работы необходимы электронные помощники, например, система помощи для подъема. В противном случае автомобиль может отказываться назад при начале движения в гору.
Советы по грамотной эксплуатации РКПП
Когда водитель пересаживается с АКПП на автомобиль с РКПП, то ему потребуется понять, как ездить на роботизированной коробке передач. Первое, что он может заметить – это медленное переключение как при повышении, так и при понижении. Если слишком агрессивно работать с акселератором, то автомобиль может начать некорректно работать, поэтому “робот” подходит для спокойной езды. Если водителю нужно резко ускориться, то рекомендуется перейти в ручной режим управления и плавно работать с педалью газа.
Если слишком агрессивно работать с акселератором, то автомобиль может начать некорректно работать, поэтому “робот” подходит для спокойной езды. Если водителю нужно резко ускориться, то рекомендуется перейти в ручной режим управления и плавно работать с педалью газа.
Толчки – характерное поведение автомобиля на “роботе” при переключении. Во избежание такой проблемы необходимо привыкнуть к характеру автомобиля и начать немного сбрасывать газ перед переключением передачи.
Нужно учитывать, что система не учитывает износ сцепления роботизированной коробки передач, из-за чего нарушается калибровку настроенных механизмов. Для исправления проблемы необходимо раз в 10-15 тыс. км. отправляться в сервис для инициализации коробки.
Если игнорировать данную процедуру, то через время коробка встанет в аварийный режим.
Что такое коробка передач “робот” – это подходящий вариант для “гражданского” передвижения по городам, в которых редко встречаются пробки. Механизм позволяет комфортно передвигаться по дорогам общего пользования, при этом имя большой ресурс и низкую стоимость обслуживания при сравнении с АКПП.
Не все автошколы уделяют должное внимание объяснению принципов работы РКПП, так как машины с такой коробкой редко встречаются на дорогах достаточно редко. Однако, если вы проходите дистанционное обучение, то можно взять изучение этой темы дополнительно для изучения самостоятельно. Если вам что-то будет не понятно, преподаватель с удовольствием объяснит детали.
Как это работает: роботизированная коробка передач
Одна из ветвей развития механических трансмиссий привела инженеров и конструкторов к созданию роботизированной коробки передач – устройства, в котором передачи переключает не человек (путем включения и выключения сцепления), а «робот» — управляемый электроникой механизм. На данный момент это одна из наиболее прогрессивных типов коробок передач, устанавливаемых на автомобили, у которой, тем не менее, есть свои плюсы и минусы.
Роботизированная коробка DSG
Принцип устройства роботизированной КПП
Платформой для создания роботизированной трансмиссии послужила механическая коробка передач. Конструкторы посчитали, что нет смысла выдумывать абсолютно новый механизм, достаточно усовершенствовать уже существующий.
Конструкторы посчитали, что нет смысла выдумывать абсолютно новый механизм, достаточно усовершенствовать уже существующий.
Как известно, принцип работы механической коробки передач заключается в передаче крутящего момента от двигателя через первичный вал на вторичный, от которого крутящий момент попадает на главную передачу, а затем – на ведущие колеса. Момент переключения передач на «механике» осуществляется при помощи механизма сцепления, которым оперирует водитель — выжимая и отпуская сцепление, он руководит переключением передач с пониженной на повышенную, либо в обратном порядке.
В механизме работы роботизированной трансмиссии этот механический момент переключения передачи инженеры решили доверить автоматике, убрав из цепи управления непосредственное участие человека. У «робота» сцеплением и переключением передач ведают специальные узлы-актуаторы, которые бывают двух типов – актуаторы сцепления и актуаторы переключения передач. Первые ответственны за размыкание/смыкание первичного вала с двигателем, вторые – за переключение передач. Актуаторы, в свою очередь, управляются электронным блоком управления, который четко рассчитывает момент, когда должен отключиться/подключиться первичный вал и когда – включиться повышенная или пониженная передача. Когда такой сигнал поступает (при этом, электронный блок управления учитывает скорость движения машины, обороты двигателя, крутящий момент и другие данные), актуатор сцепления отсоединяет первичный вал от двигателя, а актуатор включения передачи выбирает нужную ступень. Затем актуатор сцепления плавно соединяет первичный вал с двигателем и автомобиль двигается на повышенной передаче. Тот же процесс происходит и при переключении с повышенной на пониженную передачу, а также при езде задним ходом. Устанавливались такие трансмиссии на автомобили многих марок (например, Toyota, Peugeot и другие).
Актуаторы, в свою очередь, управляются электронным блоком управления, который четко рассчитывает момент, когда должен отключиться/подключиться первичный вал и когда – включиться повышенная или пониженная передача. Когда такой сигнал поступает (при этом, электронный блок управления учитывает скорость движения машины, обороты двигателя, крутящий момент и другие данные), актуатор сцепления отсоединяет первичный вал от двигателя, а актуатор включения передачи выбирает нужную ступень. Затем актуатор сцепления плавно соединяет первичный вал с двигателем и автомобиль двигается на повышенной передаче. Тот же процесс происходит и при переключении с повышенной на пониженную передачу, а также при езде задним ходом. Устанавливались такие трансмиссии на автомобили многих марок (например, Toyota, Peugeot и другие).
Роботизированная» 2-вальная КПП с электрогидравлическими исполнительными механизмами (Citroen). Фото — Carexpert.ru
Как и многие механизмы, роботизированная трансмиссия была несовершенной (о ее плюсах и минусах мы поговорим позже) и именно из-за этого автомобили с «роботами» первого поколения не пользовались у покупателей успехом. Ситуация была исправлена с выходом на рынок роботизированных трансмиссий второго поколения – с двумя сцеплениями. Их еще называют преселективными коробками передач.
Ситуация была исправлена с выходом на рынок роботизированных трансмиссий второго поколения – с двумя сцеплениями. Их еще называют преселективными коробками передач.
Преселективный робот DSG с двумя сцеплениями.
Первоначально такими «роботами» оснащались автомобили концерна Volkswagen (Volkswagen, Audi, Seat, Skoda), сегодня подобными трансмиссиями оборудуются машины и других марок (BMW, Ford, Fiat). В зависимости от типа сцепления такие коробки делят на КПП с сухим и мокрым сцеплением. Принцип работы такой коробки заключается в том, что четные и нечетные ступени разнесены по разным валам (первичным и вторичным), а их включением ведает отдельный блок сцепления. Механизм такой коробки заранее подготавливает к включению следующую ступень (отсюда и название «преселективная» — предваряющая выбор передачи), благодаря чему эта процедура происходит без отключения КПП от двигателя, тем самым, не прерывается крутящий момент от мотора к ведущим колесам.
Часто возникает вопрос: в чем же различия между автоматической и роботизированной трансмиссией? Ответ прост: в устройстве. Роботизированная коробка передач – это, как было указано выше, та же «механика», только включением/выключением сцепления и переключением передач тут занимаются приводы-актуаторы. В автоматической коробке передач присутствует важный агрегат – гидротрансформатор, который заменяет собой механизм сцепления и является он связующим звеном между двигателем и собственно коробкой передач.
Роботизированная коробка передач – это, как было указано выше, та же «механика», только включением/выключением сцепления и переключением передач тут занимаются приводы-актуаторы. В автоматической коробке передач присутствует важный агрегат – гидротрансформатор, который заменяет собой механизм сцепления и является он связующим звеном между двигателем и собственно коробкой передач.
Достоинства и недостатки «роботов»
Положительными сторонами роботизированных коробок передач первого поколения было отсутствие педали сцепления и более низкая, чем у автоматической трансмиссии, цена. Отрицательным аспектом этих КПП был несовершенный механизм включения последующих передач, из-за чего автомобиль дергался, что приносило дискомфорт водителю и пассажирам. Также минусом этой коробки была сложность и относительно высокая стоимость ее обслуживания, которая была выше, чем у традиционной механической трансмиссии.
К плюсам преселективной роботизированной КПП можно отнести скорость переключения передач, экономичность (ввиду отсутствия потери мощности при переключении передач), работу в полностью автоматическом либо «ручном» режиме. К минусам – наличие рывков при езде на первой передаче, дороговизну ремонта и обслуживания. Например, такой характерный для многих «роботов» минус, как откатывание автомобиля назад при трогании в гору (все же роботизированная трансмиссия, несмотря на отсутствие привычного механизма сцепления, является той же «механикой») изрядно нервирует владельцев машин с РКПП и требует привыкания к подобной особенности.
К минусам – наличие рывков при езде на первой передаче, дороговизну ремонта и обслуживания. Например, такой характерный для многих «роботов» минус, как откатывание автомобиля назад при трогании в гору (все же роботизированная трансмиссия, несмотря на отсутствие привычного механизма сцепления, является той же «механикой») изрядно нервирует владельцев машин с РКПП и требует привыкания к подобной особенности.
Читайте еще: Поломки Робота
Преселективный «робот» S tronic от Audi.
Как правильно обслуживать роботизированную КПП
Механическую коробку переключения передач с автоматическим управлением обычно называют роботизированной. У каждого автомобильного концерна есть в арсенале такая разновидность коробки передач. Создавая роботизированную КПП, компании преследовали цель занять привлекательную рыночную нишу между дешевой МКПП и дорогой АКПП.
Роботизированная коробка передач (КПП) на легковых автомобилях у каждого производителя имеет свое название: Quickshift («Рено»), 2-tronic («Пежо»), Allshift, Twin Clutch SST, Sporttronic («Мицубиси»), Easytronic («Опель»), Durashift EST («Форд»), Dualogic, Speedgear («Фиат»), MultiMode, SMT («Тойота»), i-Shift («Хонда»), SensoDrive, EGS или BMP («Ситроен»), Selespeed («Альфа Ромео»), Automatic Stickshift, DSG («Фольксваген»), Sequentronic («Мерседес-Бенц»), SMG/SSG («БМВ»), S-Tronic («Ауди»), PDK («Порше»).
Принцип работы роботизированной коробки.
Роботизированная КПП состоит из механической коробки передач, оборудованной исполнительными механизмами и блоком управления. Блок управления считывает информацию либо с датчиков вращения коленчатого вала, либо с датчика скорости и, при необходимости, осуществляет переключение передач посредством гидравлического либо электрического исполнительного механизма. Вот почему «роботроник» иногда классифицируется как «автомат» – при переключении передач вам не надо выжимать сцепление. Однако это не совсем верно.
Дело в том, что отсутствие педали сцепления в салоне не исключает самого диска сцепления из всего механизма. Типичная проблема всех роботизированных коробок заключается в разрыве потока мощности при переключении передач, что порой выливается в неприятные рывки при переключении.
Казалось бы, подобная проблема существует и в МКПП, но не следует сбрасывать со счетов человеческий фактор. Человек, управляющий автомобилем с МКПП, способен быстро подстраиваться под любую дорожную ситуацию, оценивая ее наперед, и делать переключение передач практически незаметным.
Различные компании используют разные настройки для «роботроников». Например, фирма Opel устанавливает на свои модели роботизированную КПП под названием Easytronic, которая обеспечивает максимально комфортное переключение передач при спокойном вождении и вызывает дискомфорт при активной езде.
Ford устанавливает Durashift специально для любителей быстрой, агрессивной езды, но… в условиях города, медленного передвижения в пробках, в отличие от «роботроников». Кстати, «роботроник» позволяет тормозить двигателем, в отличие от автоматической коробки. Для водителей, любящих держать процесс поездки под контролем, такая функция просто незаменима. Также роботизированная КПП позволяет переключать передачи в ручном режиме, что делает процесс езды более динамичным.
Основные проблемы «роботов»
Изначально роботизированные коробки устанавливались на автомобили класса «B», такие как Opel Corsa, Ford Fiesta и т.д. Сейчас сфера применения роботизированных КПП значительно расширилась. Теперь «роботроники» устанавливаются на автомобили гольф-класса – Ford Focus, VW Golf и многие другие, а также на компактные мини-вэны и кроссоверы. Для потребителя, не располагающего достаточной суммой денег на покупку автомобиля с АКПП и не желающего «путаться в педалях», роботизированная коробка кажется просто незаменимой.
Впрочем, все виды коробок передач имеют свою «ахиллесову пяту», в том числе и роботизированная. Из-за ее схожести с МКПП есть проблема замены диска сцепления. С другой стороны, сам процесс замены диска сцепления не намного сложнее замены сцепления в механической коробке.
Еще одна актуальная проблема роботизированных коробок передач – стабильная работа контактов. Система управления «роботроником» имеет массу контактов, разъемов, а также электрические приводы. При нарушении одного из контактов «роботроник» перестает функционировать. Подобная остановка коробки приводит к тому, что переключение передач становится невозможным. Крайне неприятно, если такое случилось не в нейтральном положении «роботроника». При такой остановке коробки буксировать автомобиль нельзя, придется вызывать эвакуатор и транспортировать машину к месту ремонта.
Помимо перечисленных проблем у роботроников бывают сбои в системной плате. Подобная проблема «лечится» перепрошивкой чипа. Остальные проблемы схожи с проблемами механической коробки передач: при большом пробеге изнашиваются синхронизаторы, иногда требуются настройка сцепления, регулировка тяги. Все эти проблемы легко устраняются в специализированном автосервисе (и сравнительно недорого). В принципе глобальных проблем в процессе эксплуатации роботизированных коробок передач не встречается.
Особенности обслуживания и эксплуатации
Независимые СТО предлагают свои услуги по ремонту трансмиссии с учетом объективной ситуации местного рынка. А это значит, что у новосибирских мастеров автосервиса накоплен опыт обслуживания преимущественно автоматических коробок передач, вариаторов и, конечно же, классической «механики».
«Подержанные машины с роботизированными коробками поступают в Россию в основном из Западной Европы, – говорит Константин Зайцев, управляющий автосервисом «Мастерская по ремонту АКПП». – По таким машинам пока еще недостаточно информации, на рынке их мало. К нам эти машины поступают в основном со вторичного рынка, и их пока еще немного в Новосибирске».
Однако Константин Зайцев упомянул в числе наиболее часто встречающихся «болезней» роботизированных коробок проблемы с электронным блоком – тем самым, который руководит работой сцепления.
В силу объективных причин, на базе которых формируется рынок автомобилей Новосибирска, дилерские автосервисы имеют значительно больший опыт ремонта машин с роботизированными коробками передач.
«Многое зависит от того, насколько грамотно водитель управляет машиной с роботизированной коробкой, – рассказывает Андрей Владимиров, заместитель начальника СТО сервисного центра «Сибтрансавто Новосибирск», официального дилера Opel, Chevrolet. – «Робот» управляет сцеплением, с его помощью происходит включение/выключение сцепления, и поэтому, если водитель не выключает передачу, а стоит на светофоре с включенной передачей, у его автомобиля в итоге быстро изнашиваются диски сцепления. То есть это происходит от неправильной эксплуатации и незнания особенностей работы роботизированной КПП».
Несмотря на то что общий принцип работы коробок передач – «роботов» схож, каждый производитель выпускает на рынок свой собственный, немного отличный от других вариант этого узла автомобиля. Поэтому ремонт роботизированных коробок передач требует знаний всех рекомендованных производителем технологий, а также наличия необходимого оборудования и одобренных изготовителем запасных частей и расходных материалов.
В гарантийный период диски сцепления чаще всего меняются за счет дилера, а по истечении срока гарантии – за счет владельца автомобиля. Поэтому владельцам таких машин рекомендуется ремонтировать роботизированные коробки в постгарантийный период у дилера, так как все запчасти в данном случае точно будут оригинальными, с завода-изготовителя – это значительно увеличит ресурс «робота».
Еще раз напомним, что современная роботизированная КПП буквально нашпигована электроникой. Ремонт большинства из них порой невозможно выполнить без дилерского сканера. Или же, устранив механическую поломку, без необходимого дилерского оборудования нельзя выполнить электронное перепрограммирование коробки передач. Если этого не сделать – она опять выйдет из строя.
Владельцам автомобилей с роботизированной коробкой передач следует помнить, что «робот» – это, скорее, усовершенствованная электроникой «механика». Такие машины имеют свои особенности эксплуатации, которые следует неукоснительно соблюдать.
http://www.auto-sib.com/remont/detail/7522.html
Автомат или механика? — Автошкола
Для чего вообще нужна коробка передач? Все бензиновые и дизельные двигатели имеют ограниченный диапазон оборотов при которых достигается максимальный крутящий момент – характеристика двигателя, отвечающая за тягу и возможность ускорения. Для оптимизации разгона автомобиля и расхода топлива между двигателем и ведущим мостом (раздаткой и мостами на полноприводных автомобилях) устанавливают коробку передач.
Коробки переключения передач – это устройство позволяющее менять передаточное отношение числа оборотов на входе и выходе в зависимости от включенной передачи (в вариаторе бесступенчато или с искусственными передачами). Число передач доходит до 10 у некоторых производителей легковых автомобилей, а в грузовиках и того больше.
С развитием технологий производители автомобилей стали массово внедрять автоматические трансмиссии. Это сложный агрегат, который облегчает труд водителя, но вместе с тем имеет ряд недостатков. Главный недостаток – цена и дорогостоящие ремонты при ограниченном сроке службы. Чтобы как то вырваться в конкурентной борьбе за покупателя различные производители делают автоматические трансмиссии (коробки передач). Сейчас все используемые автоматические трансмиссии можно разделить на следующие типы.
- Классическая гидромеханическая трансмиссия (гидромеханический автомат) – результат модернизаций первых автоматических коробок передач. Надежная конструкция, обычно содержит до 15 литров специального масла которое подлежит замене в среднем через 60 тысяч километров пробега. Недостаток – цена, дороговизна обслуживания, повышенный расход топлива по сравнению с механической трансмиссией и хорошие показатели по быстродействию только у премиальных брендов
- Вариатор – недостатки в малом сроке службы, дорогом ремонте, шумность и своеобразном поведении автомобиля при разгоне.
- Роботизированная коробка передач –самый дешевый вариант, представляет практически обычную механическую коробку передач с роботизированным управлением переключениями передач и сцеплением. Недостатки – значительный проигрыш в динамике разгона и расходе топлива по сравнению с механикой.
- Робот с двумя сцеплениями – самый быстродействующий автомат. Недостатки – короткий срок службы, перегрев в пробках, дорогой ремонт.
Всем автоматическим трансмиссиям противопоказаны тяжелые условия эксплуатации. Это приводит к катастрофически быстрому износу и дорогому ремонту.
Это касалось техники, а теперь про водителя. При управлении автомобилем водитель должен следить за изменяющейся обстановкой при движении автомобиля. И все водители разделяются на опытных и новичков. Опытные водители легко справляются с обработкой поступающей информации в голове и своевременно предпринимают необходимые действия. Обучение управлению автомобилем – это своего рода тренировка и развитие головного мозга. И развитие тем глубже, чем больший объем задач необходимо решать. То есть водитель обучающийся на механике становится умнее водителя, который не умеет ездить на автомобиле с механической коробкой передач. Обучаться на механике сложнее, но зато потом проблем с движением будет меньше. Любой водитель, умеющий ездить на автомобиле с механической коробкой переключения передач с легкостью сядет за автомобиль с автоматической трансмиссией, но не наоборот. Чтобы сесть на механику водителю имеющему водительское удостоверение на право управления автомобилем с автоматической коробкой переключения передач необходимо будет заново пройти обучение в автошколе и заново сдать экзамен в ГИБДД.
Роботизированная коробка передач
Основу роботизированной коробки передач составляет механическая коробка, но функции выключения сцепления и переключения передач автоматизированы. Работой коробки передач управляет электронный блок с заложенным алгоритмом управления.
Коробка-робот сочетает топливную экономичность и высокую надежность МКПП с комфортом автоматической коробки. Но при этом стоимость «робота» значительно ниже классической АКПП. Именно эти факторы поспособствовали тому, что большинство автопроизводителей в настоящее время оснащают свои транспортные средства роботизированными коробками. Они устанавливаются как на модели эконом, так и премиум класса.
Конструкция роботизированной коробки передач
В зависимости от компании-производителя конструкция роботизированных коробок может разниться. Однако следует выделить их общее устройство: механическая коробка передач с интегрированной системой управления сцеплением и передачами.
В автоматизированных КПП применяется сцепление фрикционного типа: это либо отдельный диск, либо пакет фрикционных дисков. Инновационным считается т.н. двойное сцепление, способное передавать крутящий момент без потери мощности.
Как указывалось выше, основу конструкции роботизированной коробки составляет МКПП. Производители, как правило, используют уже готовые технические решения. К примеру, на базе АКПП 7G-Tronic построена автоматизированная коробка передач Speedshift от Mercedes – в этом случае гидротрансформатор был заменен фрикционным многодисковым сцеплением. Базой для SMG от BMW служит 6-ступенчатая «механика», оснащенная электрогидравлическим приводом сцепления.
«Роботы» могут комплектоваться гидравлическим либо электрическим приводом сцепления и передач. В качестве исполнительных устройств в электрическом приводе используются сервомеханизмы (механическая передача и электродвигатель). Гидравлический привод приводится в действие посредством гидроцилиндров, которые находятся под управлением электромагнитных клапанов. Этот вид привода также называют электрогидравлическим. Некоторые конструкции роботизированных коробок передач с электрическим приводом (Durashift EST от компании Ford, Easytronic от компании Opel) оснащаются гидромеханическим блоком с электродвигателем для перемещения главного цилиндра привода сцепления.
Электрический привод характеризуется меньшим энергопотреблением и невысокой скоростью работы – временной промежуток переключения передач варьируется в пределах 0,3–0,5 секунды. В гидравлическом приводе постоянно поддерживается давление в системе, поэтому он требует больших затрат энергии. Вместе с тем, он отличается более высокой скоростью работы. Некоторые коробки-роботы с гидроприводом, которыми комплектуются спортивные авто, отличаются поразительной скоростью переключения передач, например, у Lamboghini Aventador этот показатель составляет 0,05 cек., а у Ferrari 599GTO – 0,06 cек.
Эти качества определяют область применение агрегатов. Таким образом, «роботы» с электрическим приводом устанавливаются на бюджетные транспортные средства, а с гидравлическим – на автомобили сегмента премиум.
Электрическим приводом оснащаются следующие коробки передач:
-
SensoDrive от компании Citroen;
-
2-Tronic от компании Peugeot;
-
Easytronic от компании Opel;
-
MultiMode от компании Toyota;
-
Dualogic от компании Fiat;
-
Allshift от компании Mitsubishi;
-
Durashift EST от компании Ford.
Гидравлический привод устанавливается на следующие роботизированные коробки передач:
-
SMG от компании BMW;
-
R-Tronic от компании Audi;
-
Quickshift от компании Renault;
-
ISR от компании Lamborghini;
-
Selespeed от компании Alfa Romeo.
Электронная система осуществляет управление роботизированной коробкой передач. Она состоит из входных датчиков, исполнительных устройств и электронного блока управления. Задача входных датчиков заключается в отслеживании основных параметров коробки: положение селектора, положение вилок включения передач, частоту вращения на входе и выходе, температуру и давление трансмиссионного масла. Все параметры передаются в блок управления.
Учитывая входящие сигналы датчиков, электронный блок управления формирует команды для исполнительных устройств в соответствии с заложенной программой. Кроме того, электронный блок в процессе работы взаимодействует прочими электронными системами, среди которых система управления двигателем, система ABS (ESP). В коробках с гидравлическим приводом в систему управления также входит гидравлический блок управления (отвечает за управление гидроцилиндрами и давление в системе).
В зависимости от привода исполнительными механизмами выступают электромагнитные клапаны гидроцилиндров (гидравлический привод), электродвигатели (электрический привод).
Коробка передач с двойным сцеплением
Роботизированная коробка передач имеет достаточно весомый недостаток – относительно большой промежуток времени переключения передач. Данный недостаток влечет за собой провалы и рывки в процессе управлением машины, что в свою очередь приводит к снижению комфорта. Для решения данной проблемы была разработана коробка с двойным сцеплением, которая обеспечивает переключение без потери мощности.
При уже включенной передаче двойное сцепление позволяет выбрать следующую передачу и включить ее при первой потребности, при этом работа коробки передач не будет прервана. Отсюда исходит другое название – преселективная коробка передач (preselect – предварительный выбор).
Еще одним преимуществом «робота» с двойным сцеплением считается высокая скорость переключения. Причем, скорость зависит лишь от скорости переключения муфт (DCT M Drivelogic от BMW – 0,1 cек., DSG от Volkswagen – 0,2 cек.). Данный тип коробки передач отличается компактными размерами, что особенно важно для малолитражных автомобилей. Вместе с этим, отмечается повышенное энергопотребление, особенно это касается коробки с «мокрым» сцеплением. Высокая скорость переключения вместе с беспрерывной передачей крутящего момента обеспечивает хорошую разгонную динамику транспортного средства и значительную топливную экономичность.
Двойным сцеплением комплектуются многие роботизированные коробки передач:
-
DSG от компании Volkswagen;
-
Speedshift DCT от компании Mercedes;
-
DCT M Drivelogic от компании BMW;
-
PDK от компании Porsche;
-
S-Tronic от компании Audi;
-
Twin Clutch SST от компании Mitsubishi;
-
Powershift от компаний Ford и Volvo;
-
TCT от компании Alfa Romeo.
Даже спортивный автомобиль Ferrari 458 Italia укомплектована коробкой с двойным сцеплением Doppelkupplungsgetriebe. Вышеуказанные коробки передач имеют гидравлический привод сцепления и передач. В настоящий момент лишь одна коробка использует электропривод устройств – EDC (Efficient Dual Clutch) от компании Renault. Стоит отметить, что время переключения передач составляет всего 0,29 сек.
Лидерами по массовому применению коробок передач с двумя сцеплениями по праву считаются компании Audi и Volkswagen, которые устанавливают на свои автомобили коробки S-tronic и DSG с 2003 года. S-tronic, в отличие от коробки DSG, устанавливается продольно на оси полноприводных и заднеприводных автомобилей.
DCT M Drivelogic – это автоматизированная коробка передач с функцией Drivelogic. Данная функция предусматривает 11 программ переключения передач, из которых 6 предполагают выполнение в ручном режиме, а остальные 5 – это автоматизированные программы переключения передач. С помощью этой функции можно адаптировать смену передач под стиль вождения конкретного человека.
Принцип работы роботизированной коробки передач
У данного типа коробки передач предусмотрено два режима работы: автоматический и полуавтоматический. В первом случае электронный блок управления задействует определенный алгоритм управления коробкой, учитывая при этом сигналы входных датчиков. Команды блока управления выполняют исполнительные механизмы.
Полуавтоматический режим переключения передач аналогичен функции Типтроник на АКПП. Благодаря данному режиму обеспечивается возможность последовательно переключать передачи посредством селектора и/или подрулевых лепестков. По этой причине роботизированную трансмиссию также называют секвентальной КПП (sequensum – последовательность).
отличие от АКПП, минусы, плюсы
Современный автомобиль уже не тот, что был пару десятков лет назад. Сегодня это высокотехнологичное транспортное средство с электронным управлением большинства процессов, различными полезными дополнениями (парктроник, ABS, «старт-стоп», и т. д.) и разнообразными вариантами конструкции трансмиссии, популярным из которых считается роботизированная коробка передач.
Называемая водителями по-простому «коробка робот», она по своей сути является механической КПП, в которой в автоматическом режиме осуществляется переключение передач. То есть на основании подаваемых водителем команд через селектор коробки и режима езды, система управления роботом согласно заложенному алгоритму выбирает наиболее подходящую передачу.
Роботизированная КПП это высокотехнологичный механизм, в котором сочетаются воедино топливная экономичность «механики» и высокая скорость работы коробки-автомат. Необходимо заметить, что такая трансмиссия стоит на порядок дешевле стандартной АКПП, поэтому сегодня гиганты автопрома комплектуют ей практически весь свой модельный ряд.
Особенности разных видов роботизированных коробок передач
Несмотря на то что эти коробки передач имеют различную конструкцию, принцип их управления и работы остается неизменным: стандартная «механика» дополненная автоматизированным модулем включения сцепления и управления переключением передач. В таком типе трансмиссии применяется фрикционный тип сцепления, состоящий как из одного диска, так и из нескольких. Однако в конструкции роботизированной КПП все более распространена система с двойным сцеплением, благодаря которой удается максимально передать крутящий момент, не теряя при этом мощности.
Поскольку основу робота составляет классическая «механика», при проектировании этого вида трансмиссии используются уже готовые варианты коробок передач. Такое конструктивное решение позволяет получить высокие рабочие показатели всего узла. Например, у известного робота SMG, которым комплектует свои модели BMW, использована базовая шестиступенчатая МКПП дополненная сцеплением с электрогидравлическим приводом.
Роботизированная КПП на автомобиле может быть оборудована гидравлической либо электрической системами управления переключением позиций и включения сцепления. В системе с гидроприводом (электрогидравликой) органами исполнения команд роботизированной коробки выступают гидроцилиндры с электромагнитными клапанами, а в электрическом типе привода эти элементы представлены шестереночной передачей и электромотором.
Отметим, что для установленного на автомобилях электрического привода характерна низкая скорость при переключении передач а также минимальное потребление энергии. Гидропривод работает быстрее, однако для этого в системе постоянно должно поддерживаться давление, соответственно, энергопотребление при этом многократно возрастает.
По этой причине электроприводные роботизированные КПП устанавливают на автомобили бюджетного класса, а гидроприводные — на более дорогие транспортные средства. Такое конструктивное решение позволяет использовать трансмиссию-робот практически на любом типе транспортного средства.
Как устроены роботизированные КПП
Управление этим видом трансмиссии осуществляется при помощи электронного модуля, который обрабатывает сигналы с различных датчиков, и уже на основании этого отдает команды исполнительным механизмам и устройствам (электродвигатель, механическая передача, гидроцилиндр). Датчики собирают основную информацию о положении селектора КПП, оборотах коленвала, масляном давлении и его температуре, скорости движения автомобиля, которую передают для обработки управляющей системе. Далее происходит процесс переключения позиции, который строится согласно заранее заложенным алгоритмам исполнения команд на основании поступившей информации. Также система управления роботизированной коробкой переключения передач находится в постоянном взаимодействии с системами ESP и ABS, и на основании передаваемых ими данных корректирует процесс выбора и перемены передачи.
В конструкцию гидроприводных КПП дополнительно входит блок управления гидравликой, который обеспечивает поддержание постоянного давления в системе.
Конструкция роботизированной трансмиссии с системой двойного сцепления
Несмотря на всю функциональность и комфорт при управлении автомобилем, роботизированная коробка не лишена недостатков, главным из которых считается ее замедленная реакция при переключении передач, что крайне негативно отражается на динамике движения (возникают рывки и пропадет плавный ход в момент включения позиций). Значит, чтобы устранить эту проблему, и повысить комфортабельность управления транспортным средством оборудованным «роботом», конструкторы разработали трансмиссию с системой двойного сцепления, в которой процесс смены передач происходит без потери мощности.
Благодаря такому дополнению, переключение между передачами осуществляется без перебоев в работе КПП, то есть перед началом включения передачи система управления выбирает наиболее подходящую, не выключая крутящий момент на коробке. Иными словами роботизированная трансмиссия с системой двойного сцепления называется преселективной (англ. preselect – предварительный выбор).
Преимущества робота с двойным сцеплением
Помимо своего быстродействия, которое обусловлено повышенной скоростью взаимодействия муфт (например, коробка-робот DSG от Фольксваген), этот тип КПП имеет относительно компактные размеры, ввиду чего является идеальным для использования в малолитражных автомобилях. Кроме этого, роботизированная коробка с двойным сцеплением обладает повышенным энергопотреблением, что положительно отражается на ее продуктивности и скорости отклика на перемену положения селектора водителем. Это позволяет значительно снизить потребление топлива и получить высокие динамические показатели как при разгоне транспортного средства, так и при последующем движении.
Такая конструкция применяется в следующих видах роботизированных КПП:
- S-Tronic.
- DSG.
- Twin Clust SST.
- DCT M Drivelogic.
- PDK.
- TCT.
- Powershift.
Кстати, всемирноизвестный и популярный спорткар Ferrari 458 Italia оборудован роботизированной трансмиссией с системой двойного сцепления Doppelkupplungsgetriebe. На всех перечисленных видах КПП установлен гидропривод.
Блок управления адаптивным роботом DCT M Drivelogic содержит специальную систему Drivelogik, в которой содержится алгоритм переключения для одиннадцати передач. Шесть из них адаптированы для ручного выбора, а остальные пять переключаются полностью в автоматическом режиме.
Как работает роботизированная КПП
Все типы этой трансмиссии могут работать как в автоматическом, так и в ручном режимах управления. Если выбран режим «автомат», система управления КПП согласно информации передаваемой датчиками формирует соответствующие команды, которые далее передаются на устройства исполнения команд.
Стоит заметить, что на любой из коробок-роботов выполнять переключение передач можно и в полуавтоматическом (ручном) режиме. При выборе этого режима осуществляется последовательное переключение передач (от повышенной к пониженной и наоборот). Именно из-за этой особенности функционирования, роботизированную КПП еще называют секвентальной (англ. sequensum – последовательность).
Роботизированная коробка передач — устройство и принцип действия МКПП
Ни один современный автомобиль не может плавно заводиться и двигаться, если в его устройстве нет трансмиссии. Сегодня существует большое количество всевозможных коробок передач, которые не только позволяют водителю выбрать вариант, соответствующий его материальным возможностям, но и дают возможность получить максимальный комфорт от вождения.
Кратко об основных типах трансмиссии рассказано в отдельном обзоре …Теперь поговорим подробнее о том, что такое роботизированная коробка передач, ее основные отличия от механической коробки передач, а также рассмотрим принцип работы этого агрегата.
Что такое роботизированная коробка передач
Работа коробки передач практически идентична механическому аналогу за исключением некоторых особенностей. Устройство робота включает в себя множество деталей, составляющих уже знакомую всем механическую версию ящика. Основное отличие роботизированного в том, что управление им микропроцессорного типа.В таких коробках передач переключение передач осуществляется электроникой на основании данных с датчиков двигателя, педали газа и колес.
Роботизированный ящик тоже можно назвать автоматом, но это неправильное название. Дело в том, что АКПП часто используют как обобщающее понятие. Так, у этого же вариатора есть автоматический режим переключения передаточных чисел, так что у некоторых он еще и автоматический. По сути, по устройству и принципу работы робот ближе к механической коробке.
Внешне отличить АКПП от МКПП невозможно, так как они могут иметь идентичный селектор и кузов. Вы можете проверить трансмиссию только во время движения автомобиля. У каждого типа агрегата свои особенности работы.
Основное предназначение роботизированной трансмиссии — максимально облегчить вождение. Водителю не нужно самостоятельно переключать передачи — эту работу выполняет блок управления. Помимо комфорта, производители АКПП стремятся удешевить свою продукцию.На сегодняшний день робот является самым бюджетным типом коробки передач после механики, но он не обеспечивает такого комфорта вождения, как вариатор или автомат.
Принцип работы роботизированной коробки передач
Роботизированная трансмиссия может переключаться на следующую скорость автоматически или полуавтоматически. В первом случае на микропроцессорный блок поступают сигналы от датчиков, на основе которых запускается алгоритм, запрограммированный производителем.
Большинство коробок передач оснащено ручным переключателем.В этом случае скорости все равно будут включаться автоматически. Единственное, водитель может самостоятельно сигнализировать момент включения повышенной или пониженной передачи. Некоторые автоматические трансмиссии типа Tiptronic имеют похожий принцип.
Чтобы увеличить или уменьшить скорость, водитель перемещает рычаг селектора в сторону + или в сторону -. Благодаря этой опции некоторые люди называют эту передачу последовательной или последовательной.
Роботизированная коробка работает по следующей схеме:
- Водитель включает тормоз, запускает двигатель и переводит переключатель режимов движения в положение D;
- Сигнал с блока идет на блок управления коробкой;
- В зависимости от выбранного режима блок управления активирует соответствующий алгоритм, по которому блок будет работать;
- В процессе движения датчики посылают в «мозг робота» сигналы о скорости движения транспортного средства, о загруженности силового агрегата, а также о текущем режиме коробки передач;
- Как только показатели перестают соответствовать программе, установленной на заводе, блок управления дает команду на переключение на другую передачу.Это может быть как увеличение, так и уменьшение скорости.
Когда водитель управляет автомобилем с механикой, он должен пощупать свое транспортное средство, чтобы определить момент перехода на другую скорость. В роботизированном аналоге происходит аналогичный процесс, только водителю не нужно думать, когда перевести рычаг переключения передач в нужное положение. Вместо этого это делает микропроцессор.
Система отслеживает всю информацию со всех датчиков и выбирает оптимальную передачу для конкретной нагрузки.Чтобы электроника могла переключать передачи, в трансмиссии установлен гидромеханический привод. В более распространенном варианте вместо гидромеханики установлен электропривод или сервопривод, который подключает / отключает сцепление в коробке (кстати, это имеет некоторое сходство с автоматической коробкой передач — сцепление находится не там, где находится стоит в МКПП, а именно возле маховика, а вот в корпусе самой трансмиссии).
Когда блок управления подает сигнал о том, что пора переключиться на другую скорость, первым активируется первый электрический (или гидромеханический) сервопривод.Он расцепляет поверхности трения сцепления. Затем второй сервопривод перемещает шестерни в механизме в желаемое положение. Затем первый медленно отпускает сцепление. Такая конструкция позволяет механизму работать без участия водителя, поэтому в машине с роботизированной трансмиссией педаль сцепления отсутствует.
Многие коробки переключения передач имеют принудительные положения передач. Этот так называемый типтроник позволяет водителю самостоятельно контролировать момент переключения на более высокую или пониженную скорость.
Роботизированное устройство коробки передач
Сегодня существует несколько типов роботизированных трансмиссий для легковых автомобилей. У некоторых исполнительных механизмов они могут отличаться друг от друга, но основные части остаются идентичными.
Вот узлы, входящие в коробку передач:
- Сцепление. В зависимости от производителя и модификации агрегата это может быть одна деталь с фрикционной поверхностью или несколько подобных дисков. Чаще всего эти элементы располагаются в теплоносителе, который стабилизирует работу агрегата, предохраняя его от перегрева.Преселективный или двойной вариант считается более эффективным. В этой модификации, пока включена одна передача, вторая готовится к включению следующей скорости.
- Основная деталь — обычная механическая коробка. Каждый производитель использует свои собственные разработки. Например, робот марки Mercedes (Speedshift) внутренне представляет собой автоматическую коробку передач 7G-Tronic. Единственное отличие агрегатов в том, что вместо гидротрансформатора используется муфта с несколькими фрикционными дисками.У BMW похожий подход. Его коробка передач SMG основана на шестиступенчатой механической коробке передач.
- Привод сцепления и трансмиссии. Возможны два варианта — с электроприводом или гидромеханический аналог. В первом случае выжимание сцепления осуществляется электродвигателем, а во втором — гидроцилиндрами с электромагнитными клапанами. Электропривод работает медленнее гидравлики, но не требует поддержания постоянного давления в магистрали, от которой работает электрогидравлический тип.Гидравлический робот переходит на следующую ступень намного быстрее (0,05 секунды против 0,5 секунды у электрического аналога). В основном электрическая коробка передач устанавливается на бюджетные автомобили, а гидромеханическая коробка передач устанавливается на спорткары премиум-класса, так как в них чрезвычайно важна скорость переключения передач без прерывания подачи питания на ведущий вал.
- Датчик. Таких деталей в роботе очень много. Они контролируют множество различных параметров трансмиссии, например, положение вилок, обороты входного и выходного валов, в каком положении заблокирован селекторный переключатель, температуру охлаждающей жидкости и т. Д.Вся эта информация поступает на устройство управления механизмом.
- ЭБУ — это микропроцессорный блок, в который запрограммированы разные алгоритмы с разными показателями, поступающими от датчиков. Этот блок подключается к главному блоку управления (оттуда поступают данные о работе двигателя), а также к системам электронной блокировки колес (ABS или ESP).
- Приводы — гидроцилиндры или электродвигатели в зависимости от модификации коробки.
Специфика работы РКПП
Чтобы автомобиль плавно заводился, водитель должен правильно использовать педаль сцепления.После того, как он включил первую или заднюю передачу, ему нужно плавно отпустить педаль. Когда водитель почувствует зацепление дисков, отпуская педаль, он может добавить обороты двигателя, чтобы автомобиль не глохнул. Так работает механика.
Идентичный процесс происходит в роботизированном аналоге. Только в этом случае от водителя не требуется большого мастерства. Ему нужно только переместить переключатель коробки в соответствующее положение. Автомобиль начнет движение в соответствии с настройками блока управления.
Самая простая одинарная модификация работает по принципу классической механики. Однако при этом наблюдается наличие одной проблемы — электроника не фиксирует обратную связь от сцепления. Если человек умеет определять, насколько плавно нужно отпускать педаль в том или ином случае, то автоматика работает более жестко, поэтому движение автомобиля сопровождается ощутимыми рывками.
Особенно это чувствуется в модификациях с электроприводом исполнительных механизмов — при переключении передачи муфта будет в разомкнутом состоянии.Это будет означать перерыв в подаче крутящего момента, из-за чего автомобиль начнет тормозить. Поскольку скорость вращения колес уже меньше соответствует включенной передаче, возникает небольшой рывок.
Новаторским решением этой проблемы стала разработка модификации с двойным сцеплением. Ярким представителем такой трансмиссии является Volkswagen DSG. Давайте подробнее рассмотрим его особенности.
Характеристики роботизированной коробки передач DSG
Аббревиатура означает коробку передач с прямым переключением передач.По сути, это две механические коробки, установленные в одном корпусе, но с одной точкой подключения к шасси машины. У каждого механизма своя муфта.
Основная особенность данной модификации — преселективный режим. То есть, пока первый вал работает с включенной шестерней, электроника уже подключает соответствующие шестерни (при разгоне на повышенную передачу, при замедлении — на понижающую) второго вала. Главному исполнительному механизму нужно только отключить одно сцепление и подключить другое.Как только от блока управления поступает сигнал о переходе на другую ступень, рабочая муфта размыкается, и сразу подключается вторая с уже включенными передачами.
Такая конструкция позволяет ездить без сильных рывков при разгоне. Первая разработка преселективной модификации появилась в 80-х годах прошлого века. Правда, тогда роботов с двойным сцеплением устанавливали на раллийные и гоночные автомобили, в которых большое значение имеют скорость и точность переключения передач.
Если сравнивать коробку DSG с классическим автоматом, то у первого варианта больше преимуществ. Во-первых, за счет более привычного строения основных элементов (производитель может взять за основу любой готовый механический аналог) такая коробка будет дешевле в продаже. Тот же фактор влияет на обслуживание агрегата — механика надежнее и легче ремонтируется.
Это позволило производителю установить инновационную трансмиссию на бюджетные модели своей продукции.Во-вторых, многие владельцы автомобилей с такой коробкой передач отмечают повышение экономичности автомобиля по сравнению с идентичной моделью, но с другой коробкой передач.
Инженеры концерна VAG разработали два варианта трансмиссии DSG. Один из них имеет маркировку 6, а другой — 7, что соответствует количеству шагов в коробке. Также шестиступенчатый автомат использует мокрое сцепление, а семиступенчатый аналог — сухое. Более подробно о плюсах и минусах коробки DSG, а также о том, чем еще модель DSG 6 отличается от седьмой модификации, рассказывается в отдельной статье .
Достоинства и недостатки
Рассматриваемый тип трансмиссии имеет как положительные, так и отрицательные стороны. К достоинствам коробки можно отнести:
- Такая трансмиссия может использоваться в паре с силовым агрегатом практически любой мощности;
- По сравнению с вариатором и автоматом роботизированная версия дешевле, хотя это довольно инновационная разработка;
- Роботы надежнее других автоматических трансмиссий;
- За счет внутреннего сходства с механикой легче найти специалиста, который возьмет на себя ремонт агрегата;
- Более эффективное переключение передач позволяет использовать мощность двигателя без критического увеличения расхода топлива;
- За счет повышения эффективности машина выбрасывает меньше вредных веществ в окружающую среду.
Несмотря на явные преимущества перед другими автоматическими трансмиссиями, у робота есть несколько существенных недостатков:
- Если автомобиль оборудован однодисковым роботом, то поездку на таком транспортном средстве нельзя назвать комфортной. При переключении передач будут ощутимые рывки, как будто водитель резко нажимает педаль сцепления на механику.
- Чаще всего в агрегате выходят из строя сцепление (меньшая плавность зацепления) и исполнительные механизмы. Это усложняет ремонт трансмиссий, так как у них небольшой рабочий ресурс (около 100 тысяч километров).Редко когда сервопривод можно отремонтировать, а новый механизм стоит дорого.
- Что касается сцепления, то ресурс диска тоже очень маленький — около 60 тысяч. Причем примерно на половину ресурса нужно проводить «соединение» коробки по условию поверхности трения деталей.
- Если говорить о преселективной модификации DSG, то она оказалась надежнее за счет меньшего времени на переключение скоростей (благодаря этому автомобиль не так сильно тормозит).Несмотря на это, у них все же страдает адгезия.
С учетом перечисленных факторов можно сделать вывод: по надежности и долговечности механике пока нет равных. Если упор делается на максимальный комфорт, то лучше выбирать вариатор (в чем его особенность, читайте здесь ). Следует учитывать, что такая трансмиссия не даст возможности экономить топливо.
В заключение мы предлагаем короткое видео-сравнение основных типов трансмиссий — их плюсы и минусы:
ПОДОБНЫЕ СТАТЬИ
Запуск
утверждает, что двигатели с прямым приводом — будущее робототехнических приводов
Иллюстрация: Blood Bros.
Хотя роботы становятся все более разнообразными и способными, есть один компонент, который не сильно изменился за последние полвека: их приводы.
Подавляющее большинство роботов используют электродвигатель, соединенный с коробкой передач, для перемещения каждого из своих колес и шарниров. Двигатель быстро вращается, так как он оптимизирован для этого, в то время как коробка передач снижает скорость вращения выходного вала, увеличивая при этом крутящий момент. Этот тип привода приводит в действие роботов, включая промышленное вооружение, ходячих гуманоидов и марсоходов.Но он далек от совершенства: мотор-редукторы часто бывают громоздкими и неповоротливыми. Они не выдерживают ударов и требуют значительного ухода. А если вам нужен большой крутящий момент, будьте готовы заплатить высокую цену. Робототехники давно надеялись найти лучшие альтернативы.
Канадский стартап утверждает, что действительно есть способ лучше управлять роботами. Genesis Robotics из Лэнгли, Британская Колумбия, хочет заменить обычные двигатели двигателями особого типа, крутящий момент и скорость которых можно контролировать более точно. Поскольку такой двигатель может вращаться намного медленнее, вы можете иногда использовать его для приведения в действие шарнира робота без всякой передачи, поэтому конструкция известна как прямой привод, хотя во многих случаях эти двигатели соединены с минимальная передача.
Прямые приводы представляют собой технологию, созданную десятилетиями, и вы можете найти их в промышленном оборудовании, а также в потребительских товарах. Но Genesis утверждает, что его конструкция LiveDrive может обеспечивать в три раза больший крутящий момент, чем обычные прямые приводы того же веса, в 100 раз точнее и стоит намного меньше. Компания также изобрела компактную и легкую коробку передач Reflex, которая может быть изготовлена из литого пластика, что снижает производственные затраты. Напротив, в большинстве высокопроизводительных приводов используются зубчатые передачи с волновой деформацией, которые особенно дороги, поскольку их необходимо обрабатывать с высокими допусками.
«Робототехника далеко продвинулась вперед в области управления, датчиков и искусственного интеллекта», — говорит основатель и технический директор Genesis Джеймс Классен. «Что сдерживает, так это срабатывание».
Компания из 60 человек накапливала патенты в течение последних нескольких лет, а в апреле прошлого года она получила крупные инвестиции от Koch Industries, гигантского конгломерата, базирующегося в Уичито, штат Канзас. Начиная с 2019 года Genesis либо продаст, либо лицензирует свою семью прямые приводы и редукторы для производителей роботов.
По своей конструкции прямые приводы ничем не отличаются от бесщеточных двигателей постоянного тока, состоящих из ротора с постоянными магнитами и статора с медными обмотками. Но в то время как двигатели постоянного тока обычно имеют менее дюжины магнитов и обмоток, у прямых приводов их в несколько раз больше.
Одно из преимуществ прямых приводов перед мотор-редукторами состоит в том, что вы можете более точно контролировать их крутящий момент, регулируя ток в обмотке, без дорогостоящих датчиков силы.Прямые приводы также имеют очень низкую инерцию, поэтому они могут очень быстро ускоряться и даже останавливаться или менять направление почти мгновенно. А при отсутствии люфта — провисания зубьев муфты, вызывающего потерю движения в мотор-редукторах, — прямые приводы также очень точны.
Так почему же они не используются широко в робототехнике?
Сангбэ Ким, директор лаборатории биомиметической робототехники Массачусетского технологического института, говорит, что робототехники изучают этот тип срабатывания по крайней мере с 1980-х годов. Он уже используется в высокоскоростных манипуляторах и тактильных устройствах, а ряд поставщиков действительно предлагает прямые приводы для роботов.Он объясняет, что проблема в том, что эти двигатели довольно большие. Он добавляет, что вы можете изготавливать их компактных размеров, «но плотность крутящего момента упадет». Другими словами, моторы могут хорошо вписаться в вашего робота, но они не будут достаточно мощными, чтобы заставить его двигаться. Еще одним недостатком является то, что прямые приводы выделяют много тепла, а это означает, что вам нужно добавить в свою конструкцию вентиляторы или даже системы водяного охлаждения.
Genesis заявляет, что решила эти проблемы, упростив геометрию ротора и статора, чтобы уменьшить количество деталей и максимально плотно их интегрировать.Классен говорит, что его команда уменьшила размер магнитов, которые расположены всего в миллиметрах друг от друга, в то время как обмотки также плотно встроены в якорь. Конструкция способна противостоять усиленным магнитным силам внутри двигателя, при этом обеспечивая эффективное рассеивание тепла.
«Он прочен, легко изготавливается и очень недорого», — говорит он.
Магнитные мышцы: Genesis Robotics разработала прямой привод, который плотно объединяет магниты и обмотки в компактном корпусе.Компания заявляет, что ее двигатель LiveDrive может обеспечивать в три раза больший крутящий момент на вес, чем обычные прямые приводы.
Иллюстрация: Genesis Robotics
Компания разработала две модели LiveDrive: одну диаметром 250 миллиметров, а другую — 110 мм. Публичные демонстрации на торговых выставках в целом произвели впечатление на наблюдателей, и сейчас Genesis сотрудничает с исследователями, чтобы улучшить свои моторные характеристики.
«Диаметр немного большой, но, с другой стороны, ширина очень впечатляет», — говорит Брэм Вандерборгт, робототехник из Брюссельского университета Брюсселя в Бельгии, который является консультантом компании и тестировал 250- мм LiveDrive.Одна из возможностей, которую он рассматривает, — это размещение двух или более устройств LiveDrive рядом, чтобы увеличить крутящий момент. «Это более модульная система, — говорит он.
Большинству роботов требуется больший крутящий момент, чем может обеспечить только LiveDrive. Вот почему компания Genesis создала коробку передач Reflex. Он основан на конфигурации планетарных шестерен, при этом меньшие шестерни вращаются вокруг более крупной. Такая конструкция обеспечивает более гибкий и отзывчивый привод по сравнению с приводами, используемыми в многоступенчатых зубчатых передачах. Первоначально Reflex будет изготавливаться из металла, но цель состоит в том, чтобы изготовить его из пластика, что снизит стоимость до доли стоимости существующих механизмов деформационной волны, что является основной причиной того, почему робототехническое оборудование так дорого.
Со своей стороны, Классен говорит, что лучший способ продемонстрировать преимущества своих приводов — это использовать их в реальных роботах. Его команда разработала роботизированные руки, роботов на ногах и экзоскелеты, а сейчас создает прототип домашнего робота. «Мы любим строить вещи, делать их лучше», — говорит он. «Мы — сборище редукторов».
(PDF) Разработка планетарного редуктора с низким люфтом для роботов-гуманоидов
128 ▪ ТОМ. 45, № 1, 2017 FME Transactions
шестерни, оба стационарные.Осевое смещение
планетарной шестерни достигается за счет использования необходимого количества регулировочных шайб
(DIN 988), которые устанавливаются на оси планетарной шестерни
.
Из-за небольших размеров представленный знак de-
не содержит элементов для выравнивания неравномерного распределения нагрузки между планетарными шестернями, поэтому очень важно обеспечить высокий класс точности планетарной передачи. manu-
изготовленных деталей и элементов, а также точная сборка.
Представленное решение имеет более высокую грузоподъемность, низкий люфт
, высокий КПД и существенно меньшую цену
по сравнению с гармоническим приводом — таблица 1.
Таблица 1. Сравнение гармонического привода и разработанного планетарного редуктора
с коническими шестернями
Harmonic Drive
CPU-14A-100-M
Планетарный
Редуктор
Крутящий момент [Нм] 7,8 … 11 40
Передаточное число
100 5
Люфт [угл.
<1 <4 (оценка)
КПД [%] 65 97
Вес [кг] 0.54 0.60
Размер [мм] Ø78×32 Ø76×34
Цена [€] 1200 240
Нагрузочная способность в четыре раза больше, чем у гармонического привода
, КПД выше, а цена
в пять раз ниже (цена нового редуктора (G) —
включительно). Масса планетарного редуктора на 10% больше
при почти таких же габаритах. Существенным преимуществом гармонического привода
является низкий люфт
(<1 угл. Мин.).Люфт планетарного редуктора
должен быть определен на реальной модели, но, по оценкам,
составляет менее 4 угловых минут [7]. Передаточное число планетарной передачи
в 20 раз меньше, поэтому необходимо выбрать новую головку редуктора
(G) (с 20-кратным передаточным числом)
, чтобы обеспечить кинематико-динамические требования —
измерения (угловая скорость и крутящий момент на плече).
Тем не менее, редукторы с большими значениями передаточного числа
имеют меньший КПД и больший люфт.Первое решение
(G + HD) имеет меньший люфт в
по сравнению с предложенным решением (G + PG), в то время как общая эффективность
лучше для решения (G + PG) — она на
на 5% выше .
5. ЗАКЛЮЧЕНИЕ
Типичная механическая трансмиссия в робототехнике-гуманоиде
должна иметь высокую грузоподъемность, минимальный люфт, как
, чтобы сохранять позиционирование и повторять-
Легкость движения, высокая эффективность настолько меньше Двигатели
могут быть использованы, компактная конструкция, малые габаритные размеры
и масса
, а также приемлемая цена производства.
Предлагаемое решение планетарного редуктора с коническими шестернями
имеет низкий люфт (<4 угл. Мин.), Высокую нагрузочную способность
, что в четыре раза больше, чем у привода harmo-
nic, более высокий КПД и цену. на
на
меньше в пять раз. Вес планетарного редуктора на 10% больше
при почти таких же габаритах. Существенным преимуществом гармонического привода
является низкий люфт
(менее одной угловой минуты), который очень важен для позиционирования и повторяемости движения —
.Указанные характеристики в совокупности с малой массой, габаритными размерами
и низкой производственной ценой оправдывают применение представленного решения
.
Минимизация люфта в планетарной коробке передач
может быть достигнута за счет использования косозубых шестерен и двойных косозубых шестерен
. Более высокое передаточное отношение означает не только меньший люфт на
, но и более высокую грузоподъемность шестерен,
, поэтому очевидно, что применение косозубых шестерен или двойных косозубых шестерен
может улучшить конструкцию.С другой стороны, косозубые шестерни
создают осевые силы, которые крайне нежелательны, но их можно устранить с помощью двойных косозубых шестерен
или шестерен типа «елочка». Угол наклона спирали
может быть увеличен до 45 градусов, что увеличивает количество зубьев
с зацеплением и грузоподъемность, а также минимизирует люфт
, который является одним из объектов дальнейших исследований.
Дальнейшие исследования будут также касаться параметрической оптимизации
планетарных редукторов с цилиндрическими шестернями,
косозубых шестерен и двойных косозубых шестерен (планируется практическая реализация этих редукторов
для надежного определения
различных люфтов). ценности и общая производительность).
Реальные условия работы (неравномерное распределение нагрузки
между планетарными шестернями) обычно не могут быть исправлены должным образом. Таким образом, в рамках дальнейших исследований необходимо исследовать напряженное состояние
в зубцах шестерни методом конечных элементов (анализ FEM
).
ПОДТВЕРЖДЕНИЕ
Эта работа финансировалась Министерством образования и науки
Республики Сербия по контракту
III44008 и провинциальным секретариатом по науке и
технологическому развитию по контракту 114-451-
2116/2011 .Авторы благодарны Дункермоторен
за поддержку и дарение моторов.
ССЫЛКИ
[1]
Боровак, Б. и др .: Робот-гуманоид Марко — Ассистент
по терапии для детей, в: Труды
10-го Международного симпозиума по исследованиям и
Дизайн для промышленности, 11.12.2014., Белград, стр. 1-6.
[2] Савич, С., Ракович и др .: Нелинейное управление движением
верхней части тела робота-гуманоида для манипуляций
Задача, Facta Univer-sitatis: автоматическое управление и
Robotics, Vol.13, No. 1, pp. 1-14, 2014.
[3] Каталог, Harmonic Drive AG, 2014.
[4] Кузманович С. и Раков М .: Мотор-редукторы с
с низким люфтом в армии. Engineering, Military
Технический институт Белград, Vol. 47, No. 1, 2012.
(на сербском языке)
[5] Кузманович, С., Вереш, М. и Рацков, М .: Pro-
Конструкция воздуховода
как ключевой фактор в разработке
машиностроение, в: Материалы международной конференции
Машиностроение
в XXI веке, 25-16.11.2010., Ниш, стр. 113-116.
[6] http://www.neugart.de
[7] http://www.ondrives.com
[8] http://www.sumitomodrive.com
[9] http: / /harmonicdrive.de
[10] Penčić, M., et al .: Разработка планетарного механизма
для роботов-гуманоидов, в: Proceedings of the
Design and Development of the High-Torque Robotic Actuator for Space Mechanisms | J. Механизмы Робототехника
Космическим роботам требуются компактные системы шарнирного привода (JDS), обычно состоящие из привода, трансмиссии, шарнирных элементов, которые могут передавать высокие крутящие моменты через жесткие механические порты.Сегодняшние традиционные космические приводные системы состоят из стандартных приводов и многоступенчатых трансмиссий, которые обычно включают от трех до шести ступеней. Эта текущая практика имеет определенные преимущества, такие как короткое время разработки из-за доступности механических компонентов. Однако ему не хватает интеграции на уровне системы, которая учитывает структуру привода, размер и выходное усилие, структуру трансмиссии, передаточное число и прочность, и часто приводит к длинным и громоздким узлам с большим количеством деталей.В этой статье представлено новое аппаратное обеспечение робота, которое объединяет JDS робота в одно компактное устройство, оптимизированное для его размера и максимальной плотности крутящего момента. Это достигается путем разработки роботизированного соединения с использованием специальной трансмиссии, которая при численной оптимизации может создавать неограниченные передаточные числа, используя только две ступени. Конструкция компьютеризирована, чтобы получить все решения, которые удовлетворяют его кинематическим отношениям в пределах заданного диаметра привода. По сравнению с существующими роботизированными приводами предлагаемая конструкция может привести к созданию более коротких сборок со значительно меньшим количеством деталей при том же выходном крутящем моменте.Теоретические результаты демонстрируют потенциал примера устройства, для которого был изготовлен доказательный пластиковый макет, который может обеспечить крутящий момент более 200 Н · м в корпусе размером с локтевой сустав человека. Предлагаемая технология может иметь серьезные технологические последствия в других отраслях, таких как механическое протезирование и реабилитационное оборудование.
Для многих роботизированных приложений требуются компактные системы шарнирных приводов (JDS), которые могут создавать высокие крутящие моменты на низких скоростях для таких приложений, как космические роботы.Обычные приводные системы разрабатываются путем последовательного соединения привода с какой-либо трансмиссией с высоким передаточным числом, такой как электродвигатель с гармонической передачей (HD) или планетарной зубчатой передачей (PGT). Несмотря на свою популярность, этот подход часто приводит к созданию длинных и громоздких сборок, которые увеличивают размер и сложность робота и уменьшают его рабочее пространство и размер укладки [1]. Кроме того, обычные компактные трансмиссии с высоким передаточным числом, такие как гармонические приводы, имеют высокое трение и низкую жесткость, что ограничивает их способность работать как чисто усилители крутящего момента в отсутствие схем нелинейного управления крутящим моментом [2].
В качестве альтернативы, обычные планетарные и обычные зубчатые передачи требуют наличия нескольких ступеней для достижения высоких передаточных чисел и могут привести к созданию длинных и громоздких узлов для приложений с высоким крутящим моментом. Другие типы роботизированных приводных систем основаны на интеллектуальных материалах, таких как пьезоэлектрик, сплавы с памятью формы, магнитореологические и электроактивно-полимерные приводы. Они имели ограниченный успех в разработке полностью функциональных роботизированных приводных систем, либо все еще находятся на ранних стадиях практического внедрения, либо не достигли окончательных результатов.Следовательно, разработка компактных и эффективных систем привода может улучшить производительность многих роботизированных систем и систем управления движением, особенно мобильных приложений с жесткими требованиями к крутящему моменту и размеру. Такие усовершенствования в технологии приводных систем могут также позволить рождение новых продуктов, таких как легкие протезы, которые невозможны с существующими двигателями и системами трансмиссии [3]. До настоящего времени портативные энергетические системы для переобучения голеностопного сустава имели ограниченную коммерциализацию за пределами специализированных больниц и реабилитационных клиник, главным образом из-за отсутствия адекватных готовых актуаторных технологий [4].Чтобы облегчить развитие этих устройств в более удобные для пользователя системы, следует разработать новые формы приведения в действие с такими ключевыми возможностями, как высокий выходной крутящий момент / усилие, легкий, ненавязчивый и энергоэффективный.
Робот JDS соединяет и приводит в движение два звена робота относительно друг друга (см. Рис. 1). Для выполнения своих функций JDS должен содержать (1) привод для подачи силы или крутящего момента, (2) трансмиссию для усиления силы привода и, наконец, (3) конструкцию шарнира, которая ограничивает подвижность звеньев до одного градуса. -свободы при несении нагрузок в остальных степенях свободы.
Рис.1
Рис.1
Независимо от размера и веса, динамика JDS в основном определяется характеристиками привода / трансмиссии, такими как передаточное число, жесткость трансмиссии, инерция, трение и люфт. Эти свойства играют ключевую роль в работе робота, а также в разработке его системы управления.Например, передача с низкой жесткостью уменьшает полосу пропускания сил системы привода и вносит нестабильность в контуры обратной связи с высоким коэффициентом усиления [5]. Кроме того, трение трансмиссии повышает требования к пусковому крутящему моменту привода, увеличивает его размер и снижает точность. В случае ограничений трансмиссии, таких как нелинейное трение и / или жесткость, нелинейные регуляторы используются для улучшения отношения входного / выходного крутящего момента трансмиссии [6].
В течение последних четырех десятилетий значительное количество исследований было посвящено разработке и пониманию компактных трансмиссий с высоким передаточным числом, таких как гармонические передачи.Гармонические приводы в первую очередь полезны для разработки компактных приводных систем с высоким крутящим моментом [7]. Несмотря на их популярность, два основных эксплуатационных недостатка гармонических приводов — это высокое трение и низкая жесткость. Трение восходит к основному принципу работы гармонического привода, который основан на трении скользящих зубцов между его гибкой линией и круговой шлицей. Еще один источник трения в гармоническом приводе — это высокая радиальная предварительная нагрузка генератора волн. Трение в гармонических двигателях широко изучается многими исследователями, например, в работах [1,95].[8] и [9], и хорошо известно, что он демонстрирует нелинейное поведение в результате действия скользящих зубцов. Кроме того, работа передачи гармонического привода основана на непрерывной деформации ее основного компонента, гибкой линии. Эта гибкость создает путь нагрузки с низкой жесткостью, который уменьшает рабочую полосу пропускания робота, вызывает резонанс и создает эффект люфта [9,10]. В результате гармонические приводы не работают как чистые усилители крутящего момента [11,12], так что их отклик скорости без обратной связи загрязнен не только вибрациями, но и непредсказуемыми скачками скорости после областей резонанса [9].Наконец, гармонические приводы ограничены передаточными числами ниже 1: 320 [13] по конструкции и неэффективны в низкотемпературных средах, таких как космос [14].
Другими широко используемыми передачами в роботизированных механизмах являются PGT, такие как в Refs. [15–17]. Европейский роботизированный манипулятор использует четырехступенчатый планетарный редуктор с передаточным числом 450: 1 на его шарнирах [16]. Чтобы уменьшить количество деталей и сложность сборки, коронные шестерни разделены между первой и последней двумя ступенями.Точно так же в системе привода марсохода [17] используются трансмиссии, состоящие из трех-пяти ступеней с передаточными числами от 1528: 1 до более 5000: 1. Потребность в повышенном понижении передачи важна во многих космических приложениях, поскольку они приводятся в движение с высоким крутящим моментом и низкой скоростью. Следовательно, реализация PGT в космических механизмах часто включает многоступенчатые зубчатые передачи, которые охватывают большое количество частей, таких как водила планетарной передачи, подшипники водила и отдельные подшипники планетарной передачи, что не только увеличивает сложность, но и снижает надежность таких механизмов.
Другое недавнее исследование роботизированных приводных систем касалось проблемы оптимизации соединения двигатель / трансмиссия для его наибольшего крутящего момента на инерцию в предположении, что высокие передаточные числа добавляют массу, инерцию и потери на трение [18]. Его результаты показывают, что самый большой двигатель и наименьшая трансмиссия в пределах размера соединения являются оптимальными. Однако этот подход не рассматривает приложения, требующие высоких крутящих моментов в условиях ограниченной допустимой нагрузки, такие как космические роботы.
Другими типами компактных трансмиссий в литературе по робототехнике и управлению движением являются циклоидальные редукторы [19,20] или гибридные комбинации планетарных и циклоидальных передач, известные как редукторы RV. Анализ этих механизмов показал, что, хотя они имеют более высокий КПД по сравнению с гармоническими приводами, они страдают от значительного люфта и больших ошибок передачи [21]. Кроме того, кажется, что в литературе есть пробел, касающийся максимально допустимых передаточных чисел циклоидальных приводов по отношению к их максимальному выходному крутящему моменту.
Таким образом, большинство систем привода, разработанных на сегодняшний день, основаны на коммерческих двигателях, соединенных с редукторными трансмиссиями того или иного типа [22–24], и им не хватает интеграции на системном уровне для двигателя, трансмиссии и совместной конструкции.
В следующей статье рассматривается интеграция конструкции и оптимизация роботизированной системы привода с учетом конструкции двигателя и выходного крутящего момента, конструкции и прочности трансмиссии, передаточного числа, опоры выходного подшипника и конструкции сустава робота.Кроме того, мы предлагаем новую дифференциальную планетарную трансмиссию, которая способна обеспечивать практически любое передаточное число при правильной оптимизации и которая, согласно обширным исследованиям авторов, никогда не изучалась в контексте разработки роботизированных шарниров. Однако трансмиссии с дифференциальным приводом были первоначально разработаны для автомобильной промышленности для распределения крутящего момента двигателя [25].
Ссылаясь на ранее связанную работу в Refs.[26] и [27], в этой статье рассматривается детальная конструкция механизма срабатывания JDS и представлена численная оптимизационная модель для его узла двигатель / трансмиссия. Кроме того, изучаются два тематических исследования, показывающих сравнение с обычным гармоническим приводом и планетарной трансмиссией. По сравнению с космическими приводными системами, которые были опубликованы в литературе, например, в Refs. [27–29], предлагаемая конструкция не только компактна, но и более универсальна благодаря инновационной конструкции трансмиссии, которая может обеспечивать любое передаточное число от 1: 1 до 5000: 1 с использованием только двух ступеней и стандартных диаметральных шагов.Кроме того, предлагаемый JDS является самоблокирующимся из-за своего высокого передаточного числа и, как таковой, не требует фиксирующего тормоза двигателя при больших передаточных числах, как в Ref. [27] для сохранения положения нагрузки в случае внезапной потери мощности.
Трансмиссия JDS представляет собой двухступенчатую дифференциальную планетарную передачу, схематически изображенную на рис. 2. Входом в этот механизм является солнечная шестерня ( N 2 ), а выходом — коронная шестерня ( N 5 ).Механизм крепится к земле с помощью зубчатого венца первой ступени ( N 1 ). Две планеты ( N, , , 4, , , , , 6, ) на обеих ступенях жестко прикреплены и, как таковые, ведут себя как одно твердое тело.
Рис.2
Схематическое изображение дифференциальной планетарной передачи
Рис.2
Схематическое изображение дифференциальной планетарной передачи
Трансмиссия приводится в движение двигателем с внешним ротором, встроенным в солнечную шестерню, как показано на рис.3. Набор цилиндрических поверхностей роликов удерживает радиальное положение планетарной группы, тем самым устраняя необходимость в водиле, планетах, двигателе и опорных подшипниках. Симметрия земля-земля применяется для уравновешивания внутренних моментов рыскания, которые в противном случае действовали бы на планеты из-за пары момента земля-выход.
Рис. 3
Принципиальная схема привода
Рис. 3
Принципиальная схема привода
Ключ к преимуществу этой концепции в высоком крутящем моменте описан на схемах свободного тела планетарной муфты ( N 4 , N 6 ), показанных на рис.4. Для простоты шестерни представлены их шаговыми диаметрами (PD), где D 1 , D 2 , D 4 , D 5 и D 6 обозначают диаметры шага шлифованной коронной шестерни, солнечной шестерни первой ступени, планетарной передачи первой ступени, кольцевой шестерни второй ступени и планетарной передачи второй ступени соответственно, а T в и T из являются входными и выходные моменты механизма.
Рис.4
Схема свободного тела трансмиссии исполнительного механизма
Рис.4
Схема свободного тела трансмиссии привода
В состоянии равновесия сумма моментов, действующих вокруг мгновенной оси вращения, дает преимущество крутящего момента механизма как
Tout = 2D4D5D2 (D4-D6) Tin
(1)
Уравнение (1) показывает, что выходной крутящий момент обратно пропорционален разности диаметров шага планет ( D 4 — D 6 ), так что передаточное число в основном определяется шестернями планет и довольно независимо от размера трансмиссии.Это связано с тем, что входная сила двигателя действует на рычаг момента D 4 , в то время как выходная сила действует на рычаг с гораздо меньшим крутящим моментом, эквивалентный (D 4 — D 6 ) / 2 . В результате этого отношения можно регулировать диаметры шага планет для получения очень высоких передаточных чисел без необходимости добавления дополнительных ступеней. Количество зубьев шестерни, соответствующее таким высоким передаточным числам, обосновано более подробно в гл.2.2 численными методами. Кроме того, как было показано в [5]. [30], что передаточное число привода значительно влияет на величину и распределение кинетической энергии внутри роботов-манипуляторов и может улучшить их пространственную точность за счет уменьшения воздействия их сил инерции. Это еще раз подтверждает важность разработки роботизированных соединений, способных создавать большие диапазоны передаточных чисел по своей конструкции.
Другой ключевой характеристикой этой концепции является использование структурной симметрии для уравновешивания внутренних нагрузок внутри трансмиссии, что в противном случае потребовало бы дополнительных несущих опор и компонентов.Схема свободного тела, показанная на рис. 4, показывает, что силы, действующие на сборку планет, лежат в двух разных плоскостях. Это создает момент рыскания, который имеет тенденцию искажать параллельность и перпендикулярность планет по отношению к их плоскости вращения.
Чтобы противодействовать этому моменту рыскания, выходной каскад помещается между двумя симметричными наземными каскадами таким образом, чтобы выходные планеты находились в состоянии равновесия нагрузки двойного сдвига, как показано на рис.5.
Рис. 5
Схема свободного тела планет ввода / вывода при балансировке нагрузки
Рис. 5
Схема свободного тела планет ввода / вывода при балансировке нагрузки
Кроме того, эта новая конфигурация позволяет жестко закрепить выход между двумя наземными конструкциями с помощью сдвоенных подшипниковых узлов (например,g., спина к спине, тандем, лицом к лицу) для получения жесткого выхода JDS при всех типах нагрузок. Поперечные силы реакции грунта обеспечивают поддержку против осевых и радиальных нагрузок, как показано на рис. 6.
Рис. 6
Конструкция опоры подшипника выхода JDS
Рис. 6
Конструкция опоры подшипника выхода JDS
JDS соединяется с использованием компонентов двойного назначения, чтобы упростить его сборку и уменьшить количество деталей.Компоненты двойного назначения состоят из цилиндрических поверхностей роликов, прилегающих к компонентам зубчатой передачи. Эти поверхности размещают планетарный блок в радиальном направлении, тем самым устраняя необходимость в обычных водилах планетарной передачи и соответствующих подшипниках, а также сохраняя воздушный зазор между статором и ротором (см. Рис. 3). Поверхности роликов имеют диаметр качения, равный диаметру прилегающей шестерни, чтобы синхронизировать тягу шестерни и движение качения, как показано на рис. 7.
Рис.7
Рис.7
Кроме того, планетарный блок удерживается в осевом направлении за счет упора между плоской поверхностью роликов и коронками зубьев коронной шестерни. Это связано с тем, что диаметр планетарного ролика в радиальном направлении больше меньшего диаметра коронной шестерни. В этой конфигурации действие зубьев шестерни и функции опоры подшипника интегрированы друг с другом, что приводит к очень компактной конструкции JDS.Двигатель состоит из внешнего магнитного ротора и полой пластины статора. Ротор встроен в солнечную шестерню, в то время как статор прикреплен к заземленному компоненту, как показано на рис. 3. В концепции воздушный зазор между статором и ротором поддерживается теми же поверхностями роликов, которые радиально устанавливают и выравнивают оставшиеся планетарный кластер.
Учитывая важность плотности крутящего момента (крутящий момент на вес) в системе совместного привода робота, было проведено исследование численной оптимизации аналитической модели для оценки плотности крутящего момента в диапазоне значений параметров шестерни.Традиционно проектирование зубчатых колес представляет собой итеративный процесс, однако в этой статье мы компьютеризируем конструкцию, решив все решения этой конструкции, которые находятся в пределах заданного выходного диаметра. Чтобы ограничить объем оптимизации, были сделаны следующие проектные допущения:
- (1)
Диаметр ротора двигателя почти равен диаметру отверстия солнечной шестерни или меньше его.
- (2)
Минимальное количество зубьев на сателлите планетарной передачи составляет 10 (или больше), чтобы избежать подрезки шестерни.
- (3)
Крутящий момент двигателя, усиленный передаточным числом, ниже, чем момент отказа трансмиссии.
- (4)
Стандартные диаметральные шаги варьируются от 10 до 96 зубцов / дюйм.
Зная, что планеты должны вращаться на одинаковом радиальном расстоянии от центральной оси, обозначенной K на рис. 2, можно записать следующее соотношение:
Признавая тот факт, что средний диаметр равен количеству зубьев на диаметральном шаге (= N / P ), уравнение.(2) можно переписать с точки зрения количества зубьев и диаметрального шага, как показано в следующем уравнении:
N2P1 + N4P1 = N5P2 − N6P2 = 2K
(3)
где P 1 и P 2 — диаметральные шаги первой и второй ступеней соответственно, а N 4 и N 6 — количество зубьев планетарных шестерен. , с их значениями в диапазоне от 10 зубьев на шестерню до промежуточного произвольного значения (например,г., 30) с шагом 1 зуб. Кроме того, P 1 и P 2 должны иметь определенные значения шага для использования стандартных зуборезов. Зная приблизительный диапазон значений для N 4 , N 6 , P 1 и P 2 , уравнение. (2) можно использовать для определения количества зубьев солнечной шестерни и вторичного кольцевого колеса, обозначенного как N 2 и N 5 , как
Параметры, показанные в таблице 1, использовались для заполнения переменных передачи по их возможным комбинациям для радиуса орбиты планет, увеличивающегося с 2 до 5 дюймов с шагом 0.1 дюйм. Допуская изменение радиуса рычага от 1 до 2 дюймов, параметры трансмиссии учитываются не только для различного количества зубьев, но и для физического диаметра трансмиссии.
Таблица 1
Границы параметров оптимизации
| K = 1: 0,1: 3 |
| N 4 = 10: 1: 30 |
| N = 10: 1: 30 |
| P 1 = 5: 1: 96 |
| P 2 = 5: 1: 96 |
2
2
2
Используя исчерпывающий поиск с вычислением, в котором исключаются конфигурации передачи, которые имеют нецелые значения для N 2 и N 5 , мы получили приблизительно 2.5 × 10 6 решений с соотношением от −5000: 1 до +5000: 1. Для каждой из этих конфигураций передаточное число решается с использованием следующего уравнения:
ToutTin = 1 + N1N21 − N1N6N4N5
(7) Поскольку геометрию зубьев можно извлечь из диаметральных шагов и количества зубьев, можно выполнить анализ прочности на каждой конфигурации передачи во время вычислительного цикла. Статический анализ сил показывает, что планеты являются самыми слабыми компонентами трансмиссии и поэтому ограничивают максимальный выходной крутящий момент JDS.В частности, механическая мощность передается по трем точкам сетки, как показано на рис. 8.
Рис.8
Точки сетки передачи JDS
Рис.8
Точки сетки передачи JDS
Линейные скорости (скорость прохождения зубьев) и силы передачи в точках сетки задаются как
Используя скорости и силы по тангажу, можно получить динамические коэффициенты и соответствующие силы разрушения для всех возможных конфигураций трансмиссии.Для этого планетарные напряжения рассчитываются с использованием критериев рейтинга передач Американской ассоциации производителей зубчатых колес (AGMA), включая геометрические, материальные, монтажные и надежные факторы, связанные с каждой передачей. Выходные силы, которые могут вызвать разрушение в трех точках сетки, рассчитываются с использованием контактных и изгибающих напряжений (см. AGMA 2001-DO4). Другие оставшиеся факторы, такие как перегрузка, монтаж, надежность и твердость поверхности, выбираются в соответствии с процессом изготовления / сборки.Наконец, вычислительный алгоритм возвращает матрицу, в которой каждая строка соответствует одной конфигурации этой конфигурации, а столбцы — ее соответствующие параметры. Типичная выборка решений представлена в таблице 2.
Таблица 2
Формат решений для конфигураций JDS
| Передаточное число | Макс.диаметр двигателя (дюймы) | Планета 1 PD (дюймы) | Планета 2 PD (дюймы) | Кольцо 1 PD (дюймы) | Кольцо 2 PD (дюйм) | Диаметр ступени 1 | Диаметр ступени 2 | Солнечные зубья | Зубья планетарной передачи 1 | Зубцы 1 кольца | Планета 2 зуба | Кольцо 2 зуба | Предел крутящего момента (фунт- дюйм) | Расчетная масса (фунты) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| −4709.78 | 1,14 | 0,66 | 0,66 | 2,66 | 2,66 | 41 | 44 | 55 | 27 | 109 | 29 | |||
| 1,13 | 0,67 | 0,68 | 2,67 | 2,68 | 43 | 40 | 57 | 29 | 115 | 27 | 107 | 501.66 | 2,16 |
| Передаточное число | Макс.диаметр двигателя (дюймы) | Планета 1 PD (дюймы) | Планета 2 PD (дюймы) | Кольцо 1 PD (дюймы) | Кольцо 2 PD (дюймы) | Диаметр 1 ступени | Диаметр 2 ступени | Солнечные зубья | Зубья планетарной передачи 1 | Кольцо 1 зубец | Планета 2 зуба | Кольцо 2 зуба | Предел крутящего момента (фунт-дюйм) | Расчетная масса (фунты) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| −4709.78 | 1,14 | 0,66 | 0,66 | 2,66 | 2,66 | 41 | 44 | 55 | 27 | 109 | 29 | |||
| 1,13 | 0,67 | 0,68 | 2,67 | 2,68 | 43 | 40 | 57 | 29 | 115 | 27 | 107 | 501.66 | 2,16 |
Плотность крутящего момента JDS рассчитывается на основе крутящего момента при отказе и расчетного веса шестерен и двигателя. На рисунке 9 показано соотношение между передаточным числом и плотностью крутящего момента JDS. Каждая точка представляет одну конфигурацию JDS. Отрицательные отношения указывают на обратное направление между входными / выходными движениями трансмиссии.
Рис.9
Передаточное отношение трансмиссии в зависимости от плотности крутящего момента JDS
Рис.9
Передаточное отношение трансмиссии в зависимости от плотности крутящего момента JDS
Поскольку взаимосвязь между передаточным числом и плотностью крутящего момента ограничивается способностью двигателя выдавать достаточный крутящий момент при определенном передаточном числе, решения JDS затем были отфильтрованы с использованием диаметра двигателя (взятого из диаметра отверстия солнечной шестерни) по требуемому двигателю. крутящий момент (крутящий момент отказа JDS в зависимости от передаточного числа).Этот процесс исключает конфигурации JDS с двигателями большего и меньшего размера и оставляет около 460 решений из возможных 2,5 × 10 6 . Эти конфигурации показаны на рис. 10. Классификация двигателей по размерам была оценена в соответствии с данными, предоставленными BEI KIMCO Magnetics, Inc (Сан-Диего, Калифорния). 2
Рис. 10
Диаметр двигателя в зависимости от плотности крутящего момента JDS
Рис.10
Диаметр двигателя в зависимости от плотности крутящего момента JDS
После анализа данных была выбрана одна комбинация приводов с максимально возможной плотностью крутящего момента с диаметром JDS 4,5 дюйма с учетом технологичности системы и использования стандартных компонентов подшипников. Эти характеристики перечислены в Таблице 3. Из Таблицы 3 видно, что только небольшие различия в диаметрах шага планет (17.65 мм, 17,57 мм) достаточно для получения высокого передаточного числа (1: 900). Для соответствия этим спецификациям было разработано несколько концепций дизайна с использованием, по возможности, стандартных механических компонентов. В предварительной концепции, показанной на рис. 11, шестерня с меньшей шириной торца размещается на более длинном плече момента, чтобы уравновесить момент рыскания, как показано на рис. 4.
Рис. 11
Предварительная концепция конструкции
Рис.11
Предварительная концепция проекта
| Передаточное число | 900: 1 |
| Длина | 57 мм (2,21 дюйма) |
| Диаметр | 120 мм (4,72 дюйма) |
| Вес | 1.80 кг ) |
| Число зубьев основной планетарной передачи | 12 |
| Число зубцов ведомой планетарной передачи | 11 |
| Число зубьев солнечной шестерни | 38 |
| Число зубьев ведомой шестерни 62 | |
| Число зубьев вторичной коронной шестерни | 57 |
| Диаметр 1 ступени AGMA | 18 зубьев / дюйм |
| 2 ступень Диаметр диаметра AGMA | 16 зубьев / дюйм |
| 36.83 мм (1,450 дюйма) | |
| Диаметр шага солнечной шестерни | 55,95 мм (2,202 дюйма) |
| Диаметр шага планетарной передачи | 17,65 мм (0,694 дюйма) |
| Диаметр шага выходной планетарной передачи | 17,57 мм (0,691 дюйма) |
| Шаг шлифовального кольца | 91,31 мм (3,594 дюйма) |
| Шаг шагового диаметра выходного кольца | 91,25 мм (3,592 дюйма) |
| Номинальный крутящий момент | 271 Н · м (2998 .5 фунт-дюймов) |
| Передаточное число | 900: 1 | ||
| Длина | 57 мм (2,21 дюйма) | ||
| Диаметр | 120 мм (4,7708 дюйма) | Вес | 1,80 кг (3,968 фунта) |
| Число зубьев основной планетарной передачи | 12 | ||
| Число зубцов выходной планетарной передачи | 11 | ||
| Число зубцов солнечной шестерни | 38 | ||
| 62 | |||
| Число зубьев вторичной коронной шестерни | 57 | ||
| Диаметр 1 ступени AGMA | 18 зубьев / дюйм | ||
| 2 ступень Диаметр диаметра AGMA | 16 зубьев / дюйм | ||
| Межосевое расстояние для обеих ступеней | 36.83 мм (1,450 дюйма) | ||
| Диаметр шага солнечной шестерни | 55,95 мм (2,202 дюйма) | ||
| Диаметр шага планетарной передачи | 17,65 мм (0,694 дюйма) | ||
| Диаметр шага выходной планетарной передачи | 17,57 мм (0,691 дюйма) | ||
| Шаг шлифовального кольца | 91,31 мм (3,594 дюйма) | ||
| Шаг шагового диаметра выходного кольца | 91,25 мм (3,592 дюйма) | ||
| Номинальный крутящий момент | 271 Н · м (2998 .5 фунт-дюймов) |
Следует отметить, что в двух ступенях используются несколько разные нормальные диаметральные шаги, так что рабочие диаметры шага планетарных и коронных шестерен почти, но не в точности равны при высоких передаточных числах. Среднее передаточное число на один оборот на выходе постоянно, так как оно зависит от количества зубьев на шестернях. Точность изготовления влияет на мгновенную ошибку передаточного числа, обычно известную как кинематическая ошибка, которая отвечает за шум и вибрации в коробке передач, и выходит за рамки данной статьи.
Была установлена матрица проектирования между различными концепциями с учетом прочности конструкции и рассеивания тепла, производственных допусков и центровки блока планетарных шестерен. Конечный элемент прочности и термический анализ были выполнены на механизме, чтобы гарантировать производительность в соответствии со спецификациями, изложенными в таблице 3. Окончательная модель автоматизированного проектирования представлена на рисунке 12.Некоторые из основных проблем проектирования, с которыми сталкивается эта концепция, — это точность выравнивания «земля-земля» и рассеивание тепла двигателем. Результаты анализа методом конечных элементов (FEA) подтвердили аналитические прочностные и тепловые модели, а также подтвердили допустимый крутящий момент трансмиссии и теплоотдачу двигателя. Пластиковый макет был разработан с использованием технологии аддитивного производства, чтобы получить практическое представление о конструкции JDS, а инженерная модель показана на рис. 13. Макет успешно подтвердил передаточное число и предоставил практическую обратную связь по конструкции при эксплуатации и сборке механизма до его установки. разработка дорогостоящего металлического варианта системы.
Рис. 12
(вверху) Поперечный разрез системы главной передачи; и (внизу) визуализированная трехмерная фигура конструкции
Рис. 12
(вверху) Поперечное сечение системы главной передачи; и (внизу) трехмерная фигура дизайна
Рис. 13
Пластиковый макет трансмиссии JDS (без крышки / мотора)
Рис.13
Пластиковый макет трансмиссии JDS (без крышки / мотора)
В JDS используется конструкция с двойным заземлением, чтобы удерживать выходное звено через взаимно встречный подшипник. Таким образом, в конструкции используются два тонких угловых шарикоподшипника (толщиной 1/4 дюйма), которые находятся на расстоянии 1,35 дюйма друг от друга, чтобы эффективно выдерживать изгибающие моменты до 847,4 Н · м при статическом коэффициенте безопасности 1,
.
Анализ напряжения скручивания был проведен на центральном валу, который несет половину выходной нагрузки, эквивалентной 135.1 Н · м. Исследование показало максимальное напряжение сдвига 64 МПа в зависимости от геометрии вала (внешний диаметр = 0,9 дюйма, внутренний диаметр = 0,5 дюйма), что эквивалентно коэффициенту безопасности 3,1 для алюминия 6061. Соответствующие результаты FEA показаны на рис. 14. Благодаря конструкции с двойным сдвигом выходной крутящий момент равномерно распределяется между наземными ступенями, что приводит к низким напряжениям во всей удерживающей конструкции.
Рис. 14
Результаты метода конечных элементов распределения напряжений на опорной конструкции трансмиссии
Рис.14
Результаты метода конечных элементов распределения напряжений на опорной конструкции трансмиссии
Другой анализ методом конечных элементов был разработан для оценки прочности шестерен планет, которые являются самыми слабыми компонентами трансмиссии, как показано на рис. 15.
Рис. 15
Результаты распределения напряжений на шестерне планет
Рис.15
Результаты распределения напряжений на шестерне планет
По результатам FEA наибольшие напряжения регистрируются в точках контакта и около корней зубьев шестерни. Максимальное расчетное напряжение составляет около 250 МПа. Это дает коэффициент безопасности 1,52 для легированной стали 4150, подвергнутой закалке и отпуску до RC 57-61.
Адаптация исполнительного механизма к плоской роботизированной руке изображена на рис.16. В дополнение к компактным размерам и большому выходному крутящему моменту, цельная конструкция привода поддерживает как одинарные, так и двойные срезные звенья на выходном и заземляющем элементах, соответственно. При установке на звено с двойным срезом жесткость соединения на кручение увеличивается, поскольку он действует параллельно центральному валу. Кроме того, вся электроника обратной связи и связи интегрирована и размещена в сборке JDS.
Рис.16
Трехмерная визуализация предлагаемой концепции руки
Рис. 16
Трехмерная визуализация предлагаемой концепции руки
Роботизированная рука, показанная на рис. 17, обладает как высокой удельной нагрузкой, так и очень компактным профилем, что позволяет руке исключительно хорошо работать в мобильных приложениях развертывания. Ключевой технологией, позволяющей использовать стрелу, является ее компактная исполнительная система, которая способна обеспечивать высокие крутящие моменты и обеспечивать жесткую конструкцию соединения, позволяя руке манипулировать тяжелыми грузами с ловкостью и точностью.
Рис. 17
Концепция серийной роботизированной руки, показанная в сложенном и выдвинутом положениях
Рис. 17
Концепция серийной роботизированной руки, показанная в сложенном и выдвинутом положениях
Универсальный характер предлагаемой конструкции облегчает разработку модульных систем с высокой полезной нагрузкой, которые можно реконфигурировать и адаптировать к текущей задаче.Все эти JDS могут иметь одинаковый компактный стандартный размер, но каждый, в зависимости от передаточного числа, может обеспечивать разную производительность. Этот подход может улучшить современные манипуляции, введя различные модульные соединения, которые можно заменить для различных задач, таких как медленное и точное манипулирование тяжелыми объектами или перемещение более легких объектов со скоростью и маневренностью.
Аналогичным образом, концепция привода JDS может быть полезна при разработке медицинских устройств, таких как протез локтя / руки верхней конечности, как показано на рис.18. В полностью пластиковом или гибридном сочетании пластик-металл JDS может обеспечить эффективный источник легкого срабатывания с батарейным питанием для таких устройств.
Рис.18
Компактный протез локтя / руки
Рис.18
Компактный протез локтя / руки
Для оценки жизнеспособности этой технологии в космических приложениях был проведен сравнительный анализ с летным приводом, поставляемым лабораторией реактивного движения НАСА.Стандартный полетный привод содержит двигатель в сборе, соединенный с многоступенчатой планетарной зубчатой передачей, через которую механическая энергия передается между ступенями через кронштейн рычага, как показано на рис. 19.
Рис. 19
Модель трансмиссии традиционной системы пространственного привода с зубчатыми колесами
Рис. 19
Модель трансмиссии традиционной системы пространственного привода с зубчатыми колесами
Из-за этого передаточное число (на ступень) пропорционально радиусу рычага водила по радиусу шага солнечной шестерни.Это накладывает ограничения на радиус шага солнечной шестерни и приводит к подрезанию солнечной шестерни, когда передаточное число превышает 8: 1 на ступень. В результате этого ограничения эта компоновка требует наличия нескольких ступеней для достижения высоких соотношений, что приводит к длинным, громоздким и сложным сборкам с большим количеством деталей и большим весом. На рисунке 20 показано сравнение аппаратной архитектуры стандартного полетного актуатора и предлагаемой концепции конструкции.
Рис.20
Обычная трансмиссия космического робота
Рис.20
Обычная трансмиссия космического робота
Очевидно, что предлагаемая конструкция JDS может значительно сократить количество частей системы совместного привода обычного робота, что приведет к созданию более компактных и надежных космических систем. Уменьшение количества деталей тесно связано с повышением надежности и снижением риска отказа, что имеет первостепенное значение в космических полетах.Подробное сравнение показано в Таблице 4.
Таблица 4 Сравнение
JDS с приводом из научной лаборатории Mars
| Метрика для сравнения | Предлагаемый JDS | Стандартный полетный привод Привод A338 (Mars Science Laboratory) | |
|---|---|---|---|
| Диаметр | 120 мм | ||
| Длина | 57 мм | 152 мм | |
| Общее количество деталей | 14 | 70 | |
| Количество подвижных частей | 6 | 32 | |
| 95% a | 95–99% | ||
| Номинальный крутящий момент | 271 Н · м a | 165 Н · м | |
| Номинальная скорость | 2.5 об / мин a | 1,1 об / мин |
| Метрическая система сравнения | Предлагаемый JDS | Стандартный полетный привод Привод A338 (Mars Science Laboratory) | |
|---|---|---|---|
| 907 | |||
| Длина | 57 мм | 152 мм | |
| Общее количество деталей | 14 | 70 | |
| Количество подвижных частей | 6 | 32 | 95–99% |
| Номинальный крутящий момент | 271 Н · м a | 165 Н · м | |
| Номинальная скорость | 2.5 об / мин a | 1,1 об / мин |
Сравнительный анализ JDS и гармонических приводов зависит от требований приложения, поскольку гармоники — это единственные передачи с сильно нелинейными жесткостью и трением. Чтобы проиллюстрировать некоторые из основных различий, одна конфигурация JDS сравнивается с гармонической передачей размером 25 с аналогичным выходным крутящим моментом, как показано в таблице 5.Очевидно, что трансмиссия Harmonic Drive превосходит конструкцию JDS во многих категориях, таких как количество деталей и объемная плотность крутящего момента, а также люфт. Тем не менее, гармонический привод демонстрирует гораздо большее рассеивание трения по сравнению с JDS из-за его механизма скользящей сетки и ограничивается передаточными числами ниже 1: 320 в основном из-за того, что его передаточное число определяется углом клина профиля его зуба. которое становится слишком узким выше этого отношения. С другой стороны, трансмиссия HD имеет нулевой люфт между валом двигателя и звеном робота, тогда как люфт в JDS в значительной степени определяется классом передач AGMA.Увеличение класса шестерни ужесточает допуски и уменьшает люфт, но не устраняет его.
Таблица 5 Сравнение
JDS с системой привода, в которой используется передача с гармоническим приводом
| Метрика сравнения | Предлагаемый JDS | Размер 25 передачи с гармоническим приводом (серии CSF, SHF и SHD) | |
|---|---|---|---|
| Диаметр | 120 мм | 107 мм | |
| Длина | 57 мм | 52 мм | |
| Общее количество деталей | 14 | 5 | |
| Количество подвижных частей | 6 | 6 | |
| Номинальный КПД | 90–95% | 67–70% | |
| Номинальный крутящий момент | 177 Н · м | 178 Н · м | |
| Номинальная скорость | |||
| Передаточное число | 1: 2116 | 1: 160 | |
| Требуемый крутящий момент двигателя (при условии отсутствия потерь на трение) | 0.08 Н · м | 1,11 Н · м |
| Метрическая система для сравнения | Предлагаемый JDS | Размер передачи гармонического привода 25 (серии CSF, SHF и SHD) | |||
|---|---|---|---|---|---|
| 107 мм | |||||
| Длина | 57 мм | 52 мм | |||
| Общее количество деталей | 14 | 5 | |||
| Количество подвижных частей | 6 | Номинальный КПД | 90–95% | 67–70% | |
| Номинальный крутящий момент | 177 Н · м | 178 Н · м | |||
| Номинальная скорость | 2 об / мин | Передаточное число | 1: 2116 | 1: 160 | |
| Требуемый крутящий момент двигателя (без потерь на трение) | 0.08 Н · м | 1,11 Н · м |
В случае применения в космосе, в котором скорость и динамические эффекты менее значительны по сравнению со статическим крутящим моментом, поскольку космические роботы движутся с низкой скоростью, интегрированная концепция JDS может привести к созданию более компактной и более эффективной системы привода по сравнению с системой привода космического робота, которая использует передачу с гармоническим приводом. Это связано с тем, что высокое передаточное число трансмиссии JDS снижает требования к максимальному крутящему моменту двигателя, тем самым позволяя использовать двигатель меньшего размера, который занимает меньше места, потребляет меньше тока и выделяет меньше тепла по сравнению с двигателем. управление трансмиссией с гармонической передачей.Кроме того, поскольку конструкция JDS может поддерживать высокие передаточные числа, она не допускает движения задним ходом и не требует фиксирующего тормоза на валу двигателя при больших передаточных числах, как в случае большинства аппаратных средств космического привода. Кроме того, жесткость JDS, вероятно, будет выше, чем у гармонического привода из-за его жестких компонентов зубчатой передачи, в отличие от гибкости гармонического привода. Увеличение жесткости JDS и плотности крутящего момента может быть достигнуто за счет добавления большего количества планет в сборку JDS. Это стало возможным благодаря его конструкции без носителя, которая ослабляет кинематические ограничения на механизм, чтобы принимать больше планет.Наконец, концепция JDS — это попытка численно оптимизировать систему привода робота, которая состоит из двигателя, трансмиссии и несущей конструкции, тогда как гармонические приводы являются дискретными элементами передачи.
Зажимной механизм зубчатая муфта для чувствительной к нагрузке ступенчатой передачи в роботизированном стыке | ROBOMECH Journal
Механизм наклона стойки
На рисунке 2 показана упрощенная схема увеличения силы механизма наклона стойки, разработанная ранее в [8] (двигатели не показаны).После того, как палец приводится в движение в фазе HS двигателем M 1, чтобы достичь объекта. Другой двигатель M 2 затем вращает ходовой винт и приводит рейку к шестерне, обеспечивая высокочастотную фазу руки. Чтобы обеспечить зацепление без заклинивания, ось поворота рейки должна быть расположена так, чтобы противодействующая сила от заклинивания зубьев шестерни вращала рейку против часовой стрелки, позволяла ей проскальзывать через зубья и успешно зацеплять шестерню. После зацепления направление силы реакции зубьев изменяется и удерживает рейку прижатой к опоре по часовой стрелке.Диапазон хода после включения зависит от длины стойки. В приложениях, где требуется более длительный ход ВЧ-фазы, использование стойки и длина ее хода неизбежно влияют на общую длину исполнительного устройства, которая может быть слишком большой, чтобы поместиться в отведенное пространство. На рис. 3 сравнивается минимальное размещение линейной реечной и круговой зубчатой муфты с зубчатой рейкой длиной L . Даже без учета размещения ходового винта и скользящей опоры линейная стойка требовала размещения не менее 2 л .Следовательно, круглая конструкция может значительно уменьшить общую длину, что приведет к более компактному механизму.
Рис.2
Понятие механизма наклона стойки
Рис. 3
Сравнение минимального размещения зубчатой рейки и предлагаемой зубчатой муфты
Базовая концепция
Основная концепция предлагаемого механизма зубчатая муфта аналогична механизму наклона рейки — мы используем разницу в направлении сил реакции во время заклинивания и зацепления, чтобы обеспечить зацепление без заклинивания.На рисунке 4 показана схема муфты переключения передач. Шестерня G 1 приводится в действие после того, как движение G 3 было остановлено объектом нагрузки, таким образом приводя G 2 в зацепление. Это требует небольшого тангенциального перемещения оси G 2 относительно фиксированной оси G 1, чтобы обеспечить зацепление без заклинивания (радиальное перемещение невозможно из-за чрезмерного сужения центра G 1– G 2 расстояние может привести к тому, что шестерни перестанут вращаться).Таким образом, для соединения G 1 и G 2 используется поворотное звено, где \ (\ theta \) — угол между G 1– G 2 и G 2– G 3 линий. Тяга может наклоняться вокруг оси G 1, и в этом документе она будет называться «Тяга с возможностью наклона». Пружина используется для предварительной нагрузки на вращение звена и удержания его прижатым до предела вращения. Предел вращения ограничивает вращение звена по часовой стрелке, предотвращая слишком близкое расположение центров G2 и G3 для зацепления.
Рис. 4
Схема предлагаемого механизма сцепления
Предлагаемый механизм зубчатая муфта может быть статически проанализирован отдельно для случаев зацепления и заклинивания.
Состояние стабильного зацепления
В случае нормального зацепления или зацепления шестерни передают входной крутящий момент \ (\ tau _ {in} \) на выходную сторону за счет контактов между зубьями шестерни. Для эвольвентного профиля зубьев [10, 11] нормальная сила, действующая на зубья, имеет угол, равный углу давления \ (\ alpha \) шестерен.На рис. 5 показана схема свободного тела каждой шестерни и поворотное звено в механизме зацепления. \ (F_ {lt} \) и \ (F_ {lr} \) — тангенциальная и радиальная составляющие силы, действующей на звено из-за G 2, соответственно. \ (r_1 \), \ (r_2 \) и \ (r_3 \) — радиусы шага шестерен. Силы трения не учитываются для упрощения модели. Обратите внимание, что для ясности некоторые силы, такие как сила реакции в неподвижных шарнирных соединениях, не показаны на рис. 5.Показаны только силы, связанные с анализом.
В статическом равновесии, предполагая контакт без трения,
$$ \ begin {align} F_ {lt} = {} \ frac {\ tau _ {in} (\ cos \ alpha + \ cos (\ theta + \ alpha) )} {r_1 \ cos \ alpha} \ end {align} $$
(1)
Чтобы поддерживать подходящее межосевое расстояние для положения зацепления, \ (F_ {lt} \) должен создать момент по часовой стрелке на звене и подтолкнуть его к пределу вращения. Следовательно, в стабильной сетке, когда \ (\ tau _ {in}> 0 \) и \ (\ theta> 0 \), \ (F_ {lt} \ ge 0 \).Комбинируя их с формулой. 1, получаем
$$ \ begin {выровненный} 0 <\ theta \ le \ pi -2 \ alpha \ end {align} $$
(2)
Рис. 5
Статический анализ состояния зацепления
Уравнение 2 показывает, что угол \ (\ theta \) поворотного звена, соединяющего G 1 и G 2, должен быть в пределах определенного диапазона, иначе \ (F_ {lt} \) изменит свое направление и вызовет G 2, чтобы выйти из зацепления, что нежелательно.В \ (\ theta = 0 \), особой точке механизма звена, вращение звена в любом направлении привело бы к тому, что шестерни всегда отодвигались друг от друга, то есть выходили из зацепления. Таким образом, такая нестабильная конфигурация исключена из допустимого диапазона \ (\ theta \).
Состояние отсутствия заедания
В отличие от предыдущего анализа условия зацепления, в котором только угол давления \ (\ alpha \) играл основную роль в определении полезного значения \ (\ theta \), анализ силы в Ситуация заклинивания требует более внимательного изучения физических размеров шестерен.На рис. 6 представлена схема свободного тела механизма шестерня – сцепление при заклинивании. Обратите внимание, что для ясности некоторые силы, такие как силы реакции, в неподвижных шарнирных соединениях не показаны. Пара сил реакции \ (F_ {23} \), \ (F_ {32} \) направлена радиально к центру G 3 и действует в точке заклинивания на пересечении крайних окружностей обеих шестерен. В этом исследовании G 2 приводится в движение против часовой стрелки при \ (\ tau _ {in}> 0 \). Поэтому вызывает беспокойство только верхняя точка пересечения.{-1} \ left ({\ frac {r_3 (r_3 + m) + r_2 (r_3-m)} {(r_3 + m) (r_2 + r_3)}} \ right) \ end {align} $$
(3)
где м — модуль зубьев шестерни. Статическое равновесие может быть проанализировано иначе, чем в случае создания сетки, предполагая контакт без трения:
$$ \ begin {align} F_ {lt} = {} \ tau _ {in} \ left (\ frac {1} {r_1} — \ гидроразрыв {r_2 \ sin (\ theta — \ beta)} {r_1 (r_2 + r_3) \ sin \ beta} \ right) \ end {выравнивается} $$
(4)
Поскольку мы хотим, чтобы звено немного наклонилось и позволило G 2 проскользнуть мимо застрявшего наконечника, \ (F_ {lt} \) должен обеспечить момент против часовой стрелки, и тогда звено будет предварительно загружено. сила пружины \ (F_ {sp} \), действующая на него.Для успешного устранения помех, когда \ (\ tau _ {in}> 0 \), \ (\ theta> 0 \); при сочетании этого с формулой. 4, получаем
$$ \ tau_ {in} \ left (\ frac {1} {r_1} — \ frac {r_2 \ sin (\ theta- \ beta)} {r_1 (r_2 + r_3) \ sin \ beta } \ right) <- F_ {sp} \ sin \ theta $$
(5)
Чтобы упростить задачу, мы рассмотрим случай, когда предварительная нагрузка пружины значительно мала по сравнению с касательной силой звена \ (F_ {sp} \ ll F_ {lt} \), что особенно верно для предполагаемого использования шестерни. сцепление в ступенчатой коробке передач, где на G1 подается высокий входной крутящий момент.{-1} \ left (\ frac {(r_2 + r_3) \ sin \ beta} {r_2} \ right) $$
(6)
Чтобы спроектировать рабочий механизм зубчатое сцепление, угол звена \ (\ theta \) должен удовлетворять как условию отсутствия заклинивания, так и условию стабильного зацепления, которое может быть получено из физических параметров зубчатых колес.
Рис.6
Статический анализ состояния помех
Проверка и обсуждение модели
Экспериментальная модель механизма зубчатая муфта разработана и используется для проверки разработанной математической модели стабильных и безударных условий зацепления.На рис. 7 и в таблице 1 показаны параметры эксперимента и его характеристики соответственно. Три шестерни и звено расположены, как показано. Входной крутящий момент \ (\ tau _ {in} \) создается кабелем, привязанным к ступице G 1. Ось вращения G 2 закреплена на звене и приводится в движение слабой пружиной, расположенной под G 2 и G 3. Выходное звено соединено с G 3. Основание модели выполнено из ABS. пластик и поликарбонат. Шестерни изготовлены из полиацеталя.Поворотное звено изготовлено из алюминия.
Таблица 1 Технические характеристики опытной модели
Рис. 7
Экспериментальная установка для проверки модели механизма зубчатое сцепление
Сначала мы устанавливаем положение G 3 так, чтобы заклинивание G 2– G 3 происходило всегда. Выходное звено расположено так, чтобы почти не касаться датчика силы с нулевыми показаниями. \ circ \ )].Для подтверждения результата эксперимент проводился трижды для каждого случая. На рисунке 8 показан результат эксперимента в полярных координатах между \ (\ theta \) и \ (\ tau _ {in} \). Все случаи, рассмотренные в эксперименте, представлены маленькими точками, а случаи, которые фактически привели как к стабильному, так и к стабильному построению сетки, выделены на графике (области B и C). Результаты показывают, что пересеченный диапазон \ (\ theta \) из модели может разумно предсказать фактический полезный диапазон \ (\ theta \).При θ = 96º минимальный входной крутящий момент для безударного зацепления может быть рассчитан по формуле. 5 должно быть τ
дюйм > 21,3 мНм. При отклонении от потерь на трение испытательная модель смогла начать свое безударное зацепление при τin = 50 мНм (при 96º). Отклонения от расчетных значений показаны в областях A и C. Основная причина этих отклонений — предположение о контакте без трения в модели. Трение отрицательно влияет на отсутствие заклинивания, как показано в области A; он препятствует проскальзыванию зубчатых колес и затрудняет выход из положения заклинивания.С другой стороны, в области C трение помогает предотвратить расцепление шестерен даже после превышения расчетного диапазона стабильного зацепления. Однако, если входной крутящий момент низкий, трение поверхности шестерни будет недостаточно большим, и возможно, что шестерни выйдут из зацепления. Следовательно, в качестве руководства по проектированию предлагаемого механизма рекомендуется выбирать \ (\ theta \), близкое к левому пределу пересекаемого диапазона, но не превышающее его.
Рис.8
Результат проверки модели в полярных координатах
Комплект сверхпланетарной коробки передач
и шестигранный двигатель HD
Комплект REV UltraPlanetary Gearbox Kit — это отправная точка для использования ультрапланетарной системы REV.В комплект поставки входят картриджи UltraPlanetary для поддержки шести различных конечных редукторов в диапазоне от номинального 3: 1 до 60: 1, что позволяет обеспечить нужный крутящий момент для конкретного применения. В комплект входит шестерня, уже прижатая к двигателю, и предварительно собранные картриджи, чтобы конструкторы могли начать тестирование и доработку своей конструкции.
Ультрапланетарная система — это модульная коробка передач на основе картриджей, предназначенная для работы в суровых условиях соревнований и в классе. Ультрапланетарная система включает в себя входной каскад и шестерню, которая работает с шестигранным двигателем REV HD и другими двигателями класса 550.Ультрапланетарная система, основанная на возможности легко изменять и корректировать конструкции с помощью REV Building System, состоит из предварительно собранных и смазанных картриджей, позволяющих легко и быстро менять передаточные числа. Пользователи могут сконфигурировать одноступенчатую планетарную передачу, используя один из трех различных картриджей редуктора, построить многоступенчатые редукторы, складывая отдельные картриджи вместе, и выбрать два разных способа передачи мощности: либо посредством торцевого монтажа непосредственно на выходном каскаде, либо путем выбора длины Шестигранный вал 5 мм лучше всего подходит для данной области применения.
UltraPlanetary имеет множество вариантов крепления с помощью четырех различных кронштейнов, доступных для монтажа на 15-мм экструзионный канал REV, канал REV C или канал REV U. Ведущая шестерня двигателя UltraPlanetary 550 (REV-41-1608), включенная в этот комплект, прижимается к шестигранному двигателю HD (REV-41-1291). Дополнительные шестерни можно приобрести на странице продукта 550 Motor Pinion.
Комплект
UltraPlanetary Gearbox Kit и шестигранный двигатель HD приобретен после февраля 2021 года. поставляются с версиями V2 UltraPlanetary Female 5mm Hex Output (REV-41-1615).
Технические характеристики коробки передач
- Модуль: 0,55
- Угол давления: 20 °
- Материалы: спеченная сталь, армированный стекловолокном PA66, нейлон
- Вес:
- UltraPlanetary с 3 картриджами и шестигранным двигателем HD, без оборудования: 441,5 г (0,973 фунта)
- UltraPlanetary с 3 картриджами, без двигателя и оборудования: 206,5 г (0,456 фунта)
- Картридж сверхпланетарного вывода: 66.5 г (0,147 фунта)
- Монтажная пластина UltraPlanetary: 33,5 г (0,074 фунта)
- Картридж UltraPlanetary 3: 1: 35,5 г (0,078 фунта)
- Картридж UltraPlanetary 4: 1: 34,0 г (0,075 фунта)
- UltraPlanetary 5: 1 Картридж: 36,0 г (0,079 фунта)
Характеристики шестигранного двигателя HD — без картриджей
- Диаметр корпуса: 37 мм
- Напряжение: 12 В постоянного тока
- Ток холостого хода: 400 мА
- Ток в стойле: 8.5A
- Свободная скорость: 6000 об / мин
- Момент срыва: .105 Нм
- Максимальная выходная мощность: 15 Вт
- Число энкодеров на оборот
- У мотора — 28 отсчетов / оборот
Для получения дополнительной информации см. Руководство пользователя UltraPlanetary.
Состав комплекта
Документация
канадских долларов
WormBox — AndyMark, Inc
звезда
5 из 5 звезд
Скользкий червячок
Коробки работают хорошо, за одним исключением.Червяк плотно прилегает к шестигранному валу и может свободно вращаться и скользить вперед и назад. Это вызывает небольшой люфт в коробке. Кроме того, когда червяк полностью переместился в сторону, а не в свое предполагаемое положение, зацепляется очень мало зубьев на большой шестерне. Я уверен, что это влияет на максимальный крутящий момент, хотя мы никогда его не ломали. Как только мы обнаружили эту проблему, мы решили изготовить специальную распорку, чтобы червяк был правильно центрирован на большой шестерне. Эта прокладка должна входить в комплект.
LH из Фэрфакса
Проверенный покупатель
starstarempty_starempty_starempty_star
2 из 5 звезд
«Плохо спроектированный»
«Моя главная проблема с этой коробкой передач — это два нижних монтажных отверстия, с которыми невозможно работать».
звезда
5 из 5 звезд
Обзор
5 звёзд
JS из Ноксвилля
starempty_starempty_starempty_starempty_star
1 из 5 звезд
«Слабые и завышенные»
«Обычно я доволен запчастями Энди Марка, но после использования этой коробки передач на соревнованиях в этом году и после того, как услышал другие ужасающие истории от других команд FRC, я настоятельно рекомендую не покупать этот продукт.Червячок изготовлен из нейлона и алюминия. Легкий — да. Однако этот продукт изготовлен из таких несущественных материалов, что его действительно не следует использовать для обеспечения даже небольшого крутящего момента роботизированной части. В этом году мы заменили нейлоновую шестерню ТРИ раза на двух соревнованиях, так как натяжные штифты, передающие крутящий момент на вал, прорвались сквозь непрочный пластик. Более того, в червячной коробке много люфта, и ее никогда не следует использовать на детали, которую необходимо повернуть на точный угол.Наконец, эта легкая коробка передач стоит удивительно 120 долларов. Это просто возмутительно, учитывая дешевый состав материала и относительно простую конструкцию. В целом, Wormbox невероятно ненадежен для большинства приложений робототехники, и его цена сильно завышена.
(Ответ AndyMark: мы сожалеем, что эта коробка передач не подошла для вашего приложения. Эта коробка передач предназначена для того, чтобы она была легкой, тихой и с низким крутящим моментом.) «
звезда
5 из 5 звезд
Обзор
Намного сильнее, чем я думал.Плавная работа.
RZ из Янгстауна
звезда
5 из 5 звезд
Обзор
5 звёзд
Заказ на поставку от Kincardine
звезда
5 из 5 звезд
Отличная работа, как обычно !!!
Искал замену моему любимому мотору двери фургона … AndyMark спешит на помощь !!!! Я предпочитаю торцевую установку, поэтому просто добавляю несколько отверстий и, возможно, новую пластину.Также пришлось высверлить подшипниковую сторону шестигранного вала червяка для большей длины вала планетарного редуктора.
AndyMark «NO KA OI» от команды 2348 Cool Geeks.
Алоха и Махало,
Stu
SN из Гонолулу
звезда
5 из 5 звезд
«Отличная работа, как обычно !!!»
«Искал замену моему любимому мотору двери фургона … AndyMark спешит на помощь !!!! Я предпочитаю торцевой монтаж, поэтому просто добавляю несколько отверстий и, возможно, новую пластину.Также пришлось высверлить подшипниковую сторону шестигранного вала червяка для большей длины вала планетарного редуктора.