Устройство гидромеханической коробки передач
Гидромеханическая коробка передач состоит из гидротрансформатора и механической ступенчатой коробки передач. Гидротрансформатор не обеспечивает требуемого диапазона передаточных чисел при высоком КПД, отключения ведущего вала от ведомого и движения автомобиля задним ходом. Поэтому на автомобилях применяют гидротрансформаторы в сочетании с механическими ступенчатыми коробками передач, т. е комбинированные гидромеханические коробки передач.
Гидротрансформатор состоит из рабочих колес с лопатками: ведущего (насосного), ведомого (турбинного) колес и неподвижного рабочего колеса, воспринимающего реактивный момент. Каждое рабочее колесо закреплено на своем валу: насосное колесо крепится на валу маховика двигателя; турбинное колесо крепится на первичном валу коробки передач; рабочее колесо соединяется с неподвижным валом через роликовый механизм свободного хода.
Коробка передач (двухступенчатая) состоит из первичного, вторичного и промежуточного валов с зубчатыми колесами, фрикционных сцеплений включения понижающей и «прямой» передач и соединения насосного и турбинного колес, зубчатого венца и зубчатой муфты включения передачи заднего хода с пневмоцилиндром и пружиной на штоке, большого и малого шестеренчатых насосов, центробежного регулятора.
При работающем двигателе насосное колесо воздействует лопастями на жидкость, заставляя ее не только вращаться вместе с ним, но и перемещаться вдоль лопастей по направлению к выходу, вследствие чего поток жидкости проходит через турбинное колесо, затем через реактор и возвращается к входу в насосное колесо. Жидкость циркулирует по замкнутому кругу. При этом насосное колесо передает энергию потоку жидкости, а она — турбинному колесу. Величины передаваемой потоком энергии и силового воздействия на лопасти зависят от величины скорости жидкости и ее направления.
У автомобильных гидротрансформаторов реактор соединен с его неподвижным валом через роликовый механизм свободного хода. При изменении направления момента рабочего колеса (из-за увеличения угловой скорости турбины) рабочее колесо отключается и вращается свободно, не воспринимая реактивного крутящего момента. С уменьшением угловой скорости турбинного колеса механизм свободного хода заклинивается, рабочее колесо снова останавливается и начинает воспринимать крутящий момент. Такие гидротрансформаторы называются комплексными. Для повышения КПД гидротрансформаторы блокируют, соединяя насосное и турбинное колеса с помощью фрикционного сцепления.
Такие гидротрансформаторы называются комплексными. Для повышения КПД гидротрансформаторы блокируют, соединяя насосное и турбинное колеса с помощью фрикционного сцепления.
В нейтральном положении фрикционы понижающей и «прямой» передач, соединения насосного и турбинного колес выключены и крутящий момент на ведомый (вторичный) вал не передается. На понижающей передаче включается фрикцион. Крутящий момент передается через гидротрансформатор, фрикцион понижающей передачи, зубчатые колеса понижающей передачи промежуточного вала и зубчатую муфту включения ведомого (вторичного) вала. Переключение на прямую передачу происходит автоматически, одновременным выключением фрикциона передачи. Момент от ведущего (первичного) вала передается через фрикцион прямой передачи на ведомый (вторичный) вал.
Для движения автомобиля задним ходом зубчатая муфта вводится в зацепление с блоком зубчатых колес заднего хода, сжимая пружину включения зубчатой муфты. Затем включается фрикцион понижающей передачи. Крутящий момент передается через гидротрансформатор, фрикцион понижающей передачи, зубчатые колеса промежуточного вала, блок зубчатых колес заднего хода и зубчатую муфту на ведомый (вторичный) вал, который вращается в направлении, противоположном вращению ведущего (первичного) вала.
Крутящий момент передается через гидротрансформатор, фрикцион понижающей передачи, зубчатые колеса промежуточного вала, блок зубчатых колес заднего хода и зубчатую муфту на ведомый (вторичный) вал, который вращается в направлении, противоположном вращению ведущего (первичного) вала.
Гидромеханическая коробка передач: принцип работы
На чтение 3 мин. Просмотров 1.9k. Опубликовано Обновлено
Молодые автомобилисты часто встречают в сети интернет информацию о гидромеханической коробке передач автомобиля. Однако они до конца не понимают принцип ее работы. В этой статье мы расскажем, как работает гидромеханическая коробка передач, и почему она удобнее обычной механической коробки передач.
Конструкция гидромеханической коробки передач
Гидромеханическая коробка передач имеют немаловажную особенность – она обеспечивает автоматическое сцепление. Водителю не нужно постоянно нажимать педаль сцепления. Несмотря на отсутствие педали сцепления, Гидромеханика все-таки состоит из механической коробки передач и гидротрансформатора. Механическая КПП при этом может иметь разный принцип работы:
Водителю не нужно постоянно нажимать педаль сцепления. Несмотря на отсутствие педали сцепления, Гидромеханика все-таки состоит из механической коробки передач и гидротрансформатора. Механическая КПП при этом может иметь разный принцип работы:
— двухвальный;
— трехвальный;
— многовальный;
— планетарный.
Вальный принцип работы гидромеханической коробки передач чаще всего применяется в крупном автомобильном транспорте: автобусах и грузовиках. Вальная гидромеханика работает на основе фрикционов – многодисковых муфт, которые работают в масле. Такой принцип работы позволяет избежать разрыва мощности и крутящего момента при переключении передач.
Также гидромеханическая коробка передач включает в себя ведущий, промежуточный и ведомый валы, многодисковое фрикционное сцепление (фрикцион) и зубчатую муфту. Управляет всеми этими подвижными механизмами передний и задний гидронасос. С помощью центробежного регулятора будет происходить автоматическое переключение передач.
Принцип работы гидромеханической коробки передач
Принцип работы гидромеханической коробки передач описан в таблице ниже.
| Составляющие | Описание |
| Колеса с лопатками | Гидравлический механизм такой КПП состоит из трех колес: турбинного колеса, насосного колеса и колеса реактора. |
| Колесо насоса | Колесо насоса. работает с той же скоростью вращения, что и маховик двигателя |
| Турбинное колесо | При работе колеса насоса масло поступает на его наружную часть и под действие центробежной силы заставляет вращаться лопатки турбинного колеса. |
| Колеса реактора | После турбинного колеса масло поступает на колесо реактора, которое безударно и плавно транспортирует масло снова в насосное колесо. Благодаря циркуляции масла и перемещается крутящий момент от двигателя к колесам. |
Планетарная механическая коробка передач
Является разновидностью гидромеханической коробки передач. Она состоит из планетарных механизмов. Главная солнечная шестерня закреплена на ведущем вале. Солнечная шестерня сцеплена с шестернями-сателлитами, которые свободно располагаются на своих осях. Сателлиты уже соединяются с ведомым валом через водило.
Она состоит из планетарных механизмов. Главная солнечная шестерня закреплена на ведущем вале. Солнечная шестерня сцеплена с шестернями-сателлитами, которые свободно располагаются на своих осях. Сателлиты уже соединяются с ведомым валом через водило.
Крутящий момент передается от ведущего к ведомому валу с помощью ленточного тормоза и коронной шестерни. При вращении шестерни сателлиты вращаются вокруг своих собственных осей. Крутящий момент от этого движения через водило передается на ведомый вал. Растормаживание коронной шестерни с помощью ленточного тормоза обеспечивает вращение шестерни. Сателлиты перекатываются по ней беспрепятственно, при этом ведомый вал остается неподвижным.
[youtube url=»https://www.youtube.com/watch?v=HMXujdQX688″ width=»560″ height=»315″]
Гидромеханическая двухпоточная передача
Устройствоавтомобиля
2.5. Гидромеханическая коробка передач
Гидромеханическая коробка передач состоит из гидротрансформатора и механической ступенчатой коробки передач. Гидротрансформатор не обеспечивает требуемого диапазона передаточных чисел при высоком КПД, отключения ведущего вала от ведомого и движения автомобиля задним ходом. Поэтому на автомобилях применяют гидротрансформаторы в сочетании с механическими ступенчатыми коробками передач, т. е. комбинированные гидромеханические коробки передач.
Гидротрансформатор не обеспечивает требуемого диапазона передаточных чисел при высоком КПД, отключения ведущего вала от ведомого и движения автомобиля задним ходом. Поэтому на автомобилях применяют гидротрансформаторы в сочетании с механическими ступенчатыми коробками передач, т. е. комбинированные гидромеханические коробки передач.
Гидротрансформатор состоит из рабочих колес с лопатками: ведущего (насосного), ведомого (турбинного) колес и неподвижного рабочего колеса, воспринимающего реактивный момент. Каждое рабочее колесо закреплено на своем валу: насосное колесо крепится на валу маховика двигателя; турбинное колесо крепится на первичном валу коробки передач; рабочее колесо соединяется с неподвижным валом через роликовый механизм свободного хода.
Коробка передач (двухступенчатая) состоит из первичного, вторичного и промежуточного валов с зубчатыми колесами, фрикционных сцеплений включения понижающей и «прямой» передач и соединения насосного и турбинного колес, зубчатого венца и зубчатой муфты включения передачи заднего хода с пневмоцилиндром и пружиной на штоке, большого и малого шестеренчатых насосов, центробежного регулятора.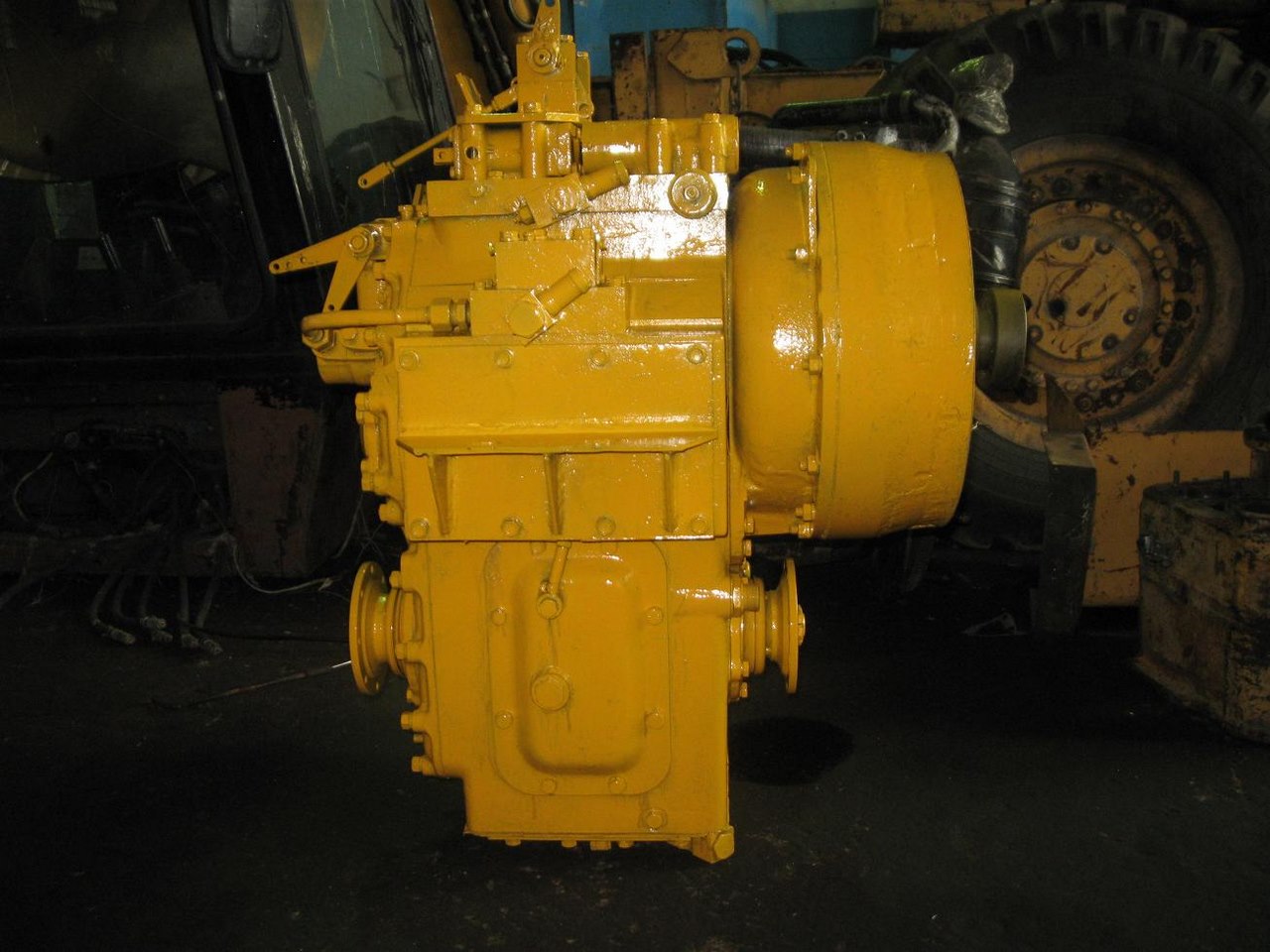
При работающем двигателе насосное колесо воздействует лопастями на жидкость, заставляя ее не только вращаться вместе с ним, но и перемещаться вдоль лопастей по направлению к выходу, вследствие чего поток жидкости проходит через турбинное колесо, затем через реактор и возвращается к входу в насосное колесо. Жидкость циркулирует по замкнутому кругу. При этом насосное колесо передает энергию потоку жидкости, а она — турбинному колесу. Величины передаваемой потоком энергии и силового воздействия на лопасти зависят от величины скорости жидкости и ее направления.
У автомобильных гидротрансформаторов реактор соединен с его неподвижным валом через роликовый механизм свободного хода. При изменении направления момента рабочего колеса (из-за увеличения угловой скорости турбины) рабочее колесо отключается и вращается свободно, не воспринимая реактивного крутящего момента. С уменьшением угловой скорости турбинного колеса механизм свободного хода заклинивается, рабочее колесо снова останавливается и начинает воспринимать крутящий момент. Такие гидротрансформаторы называются комплексными. Для повышения КПД гидротрансформаторы блокируют, соединяя насосное и турбинное колеса с помощью фрикционного сцепления.
Такие гидротрансформаторы называются комплексными. Для повышения КПД гидротрансформаторы блокируют, соединяя насосное и турбинное колеса с помощью фрикционного сцепления.
В нейтральном положении фрикционы понижающей и «прямой» передач, соединения насосного и турбинного колес выключены и крутящий момент на ведомый (вторичный) вал не передается. На понижающей передаче включается фрикцион. Крутящий момент передается через гидротрансформатор, фрикцион понижающей передачи, зубчатые колеса понижающей передачи промежуточного вала и зубчатую муфту включения ведомого (вторичного) вала. Переключение на прямую передачу происходит автоматически, одновременным выключением фрикциона передачи. Момент от ведущего (первичного) вала передается через фрикцион прямой передачи на ведомый (вторичный) вал.
Для движения автомобиля задним ходом зубчатая муфта вводится в зацепление с блоком зубчатых колес заднего хода, сжимая пружину включения зубчатой муфты. Затем включается фрикцион понижающей передачи. Крутящий момент передается через гидротрансформатор, фрикцион понижающей передачи, зубчатые колеса промежуточного вала, блок зубчатых колес заднего хода и зубчатую муфту на ведомый (вторичный) вал, который вращается в направлении, противоположном вращению ведущего (первичного) вала.
Крутящий момент передается через гидротрансформатор, фрикцион понижающей передачи, зубчатые колеса промежуточного вала, блок зубчатых колес заднего хода и зубчатую муфту на ведомый (вторичный) вал, который вращается в направлении, противоположном вращению ведущего (первичного) вала.
Преимущества и недостатки АКПП
- Прежде всего, при учете соблюдения всех правил эксплуатации и своевременного обслуживания, ресурс данного типа коробок больше, в среднем, на 30-50%, чем у аналогов.
- Еще гидромеханическая АКПП хорошо сочетается с мощными двигателями, то есть коробка способна выдерживать большой крутящий момент.
- Также следует отметить ремонтопригодность самих коробок «автомат» и гидротрансформаторов, хотя качественный ремонт АКПП все равно остается достаточно дорогим.
Если говорить о минусах, гидромеханическая АКПП отличается тем, что автомобиль с такой коробкой расходует больше топлива по причине несколько сниженного КПД подобных трансмиссий. Также перед поездкой (даже в теплое время года) рекомендуется прогрев коробок данного типа, которые очень чувствительны к давлению трансмиссионной жидкости.
Также перед поездкой (даже в теплое время года) рекомендуется прогрев коробок данного типа, которые очень чувствительны к давлению трансмиссионной жидкости.
На владельцев автомобилей с АКПП с целью продления срока службы агрегата накладываются определенные ограничения. Например, запрет на буксировку автомобиля без вывешивания передних колес со скоростью выше 30-40 км/ч на расстояние больше 50-60 км и ряд других.
Также следует выделить повышенные требования к качеству и свойствам рабочей трансмиссионной жидкости ATF, а также необходимость ее периодической замены (каждые 40-60 тыс. км. пробега).
Отдельно специалисты выделяют проблемы с гидроблоком и клапанами (соленоидами). Узкие каналы гидроплиты в процессе эксплуатации забиваются продуктами износа коробки и различными отложениями, клапана также выходят из строя. В результате это приводит к некорректной работе коробки.
Еще на «классических» АКПП, особенно в случае с бюджетными авто, слабым местом является гидротрансформатор, который теряет герметичность и начинает давать течь на относительно небольших пробегах. В таком случае требуется ремонт гидротрансформатора или его замена.
В таком случае требуется ремонт гидротрансформатора или его замена.
https://youtube.com/watch?v=scb2sASnymM
Технические характеристики
Схема ГМКП
На машинах, где в качестве трансмиссии выступает автоматический тип КПП, имеется гидротрансформатор (гидравлический механизм). Работа гидротрансформатора позволяет машине преодолевать многие препятствия, которые могут встретиться во время передвижения по пересеченной местности, так как повышается сцепления колес с дорогой. Сам корпус данного устройства дополнен специальным насосным колесом. Старт осуществляется плавно, без рывков. Кроме того, в АКПП имеются фрикционные муфты сцепления.
Работает гидротрансформатор благодаря осуществлению циркуляции масла, которое в его сторону поступает от насосного диска. Переключение скоростных режимов выполняется автоматически. Его основная функция – передача момента силы от двигателя к колесам. Турбина напрямую связана с валом, который имеется на коробке. Помимо насосного и турбинного колеса ГМКП включает реакторное колесо, функция которого заключается в обеспечении усиления крутящего момента. Циркуляция залитого горючего происходит по замкнутому кругу. На продолжительный срок рассчитан блок управления.
Циркуляция залитого горючего происходит по замкнутому кругу. На продолжительный срок рассчитан блок управления.
Принцип работы на автомобиле с гидромеханической коробки передач заключается в автоматическом преобразовании крутящего момента силовой установки. Когда реактор достигает максимального значения скорости вращения, установленный гидротрансформатор перестает изменять крутящий момент. Это позволяет обеспечить плавный разгон транспортного средства.
Таким образом, гидромеханика облегчает управление транспортным средством. Благодаря работе электроники, быстро осуществляется смена скоростей, повышается комфорт при передвижении, силовой агрегат в меньшей степени подвергается нагрузкам.
Управление гидромеханической коробкой передач
Система управления переключением передач в ГМП (рис. 1) состоит из двух частей (подсистем): управляющей и исполнительной. Исполнительной частью системы управления является масляная система (рис. 1, а). Основными составными частями ее являются масляный насос 2, фильтр 3, управляющие клапаны 4, 5, главный золотник 6, гидравлические цилиндры 7, 8.
Исполнительной частью системы управления является масляная система (рис. 1, а). Основными составными частями ее являются масляный насос 2, фильтр 3, управляющие клапаны 4, 5, главный золотник 6, гидравлические цилиндры 7, 8.
Масляный насос 2 создает давление в главной магистрали, которое подается к управляющим клапанам 4 и 5 золотникового типа. В зависимости от положения золотников управляющих клапанов и давления на выходе из них главный золотник занимает такое положение, при котором масло поступает в один из гидравлических цилиндров 7 или 8 включения фрикционов или ленточных тормозных механизмов.
45
Чаще управление основными режимами работы коробки передач осуществляется в полуавтоматическом режиме. В этом случае в управляющую систему вводится пульт с кнопками или специальный селектор, устанавливаемый на рулевой колонке или на месте рычага переключения передач.
Упрощенно работа системы управления в полуавтоматическом режиме представлена на рис. 1, б.
При установке селектора в нейтральное положение в коробке передач все передачи выключены.
В положение селектора А1 автоматически включаются первая и третья передачи и блокировка гидротрансформатора на третьей передаче.
В положении селектора А2 включаются первая и вторая передачи и блокировка гидротрансформатора на второй передаче.
При установке селектора в положение ЗХ включается передача заднего хода.
В положении ПП принудительно включается первая передача.
При изменении положения главного золотника, которое зависит от скоростного и нагрузочного режима работы, масло из главной магистрали подается под давлением к одному из выключателей 15, 16, 17, которые замыкают цепь питания электромагнитов 9, 10, 13, 14 клапанов, которые, в свою очередь, открывают доступ масла к исполнительным механизмам коробки передач.
На современных легковых автомобилях система управления автоматическими коробками передач имеет более сложную конструкцию, включающую электронные блоки управления, способные проводить анализ многих параметров и выдавать соответствующие команды исполнительным механизмам.
Пример применения электроники в управлении механической коробкой передач приведен на рис. 2.
Управление коробкой автоматическое или в ручном режиме с помощью подрулевых переключателей 4 или селектора 5, являющегося по сути джойстиком. Переход на автоматический режим работы коробки передач осуществляется кнопкой 6.
Информация от контрольных систем тормозных механизмов, электронного блока двигателя поступает в электронный блок 3 коробки передач. Туда же поступают данные о положении педали 7 управления подачей топлива и датчика 2 частоты вращения первичного вала коробки передач.
Электронный блок коробки передач выдает в нужный момент команду устройству 1 переключения передач и устройству 8 выключения сцепления, при этом номер включенной передачи высвечивается на табло панели приборов.
В ручном режиме электронный блок коробки передач обеспечивает снижение частоты вращения коленчатого вала при переходе на высшую передачу и увеличение частоты вращение при переходе на низшую передачу с целью выравнивания угловых скоростей блокируемых валов.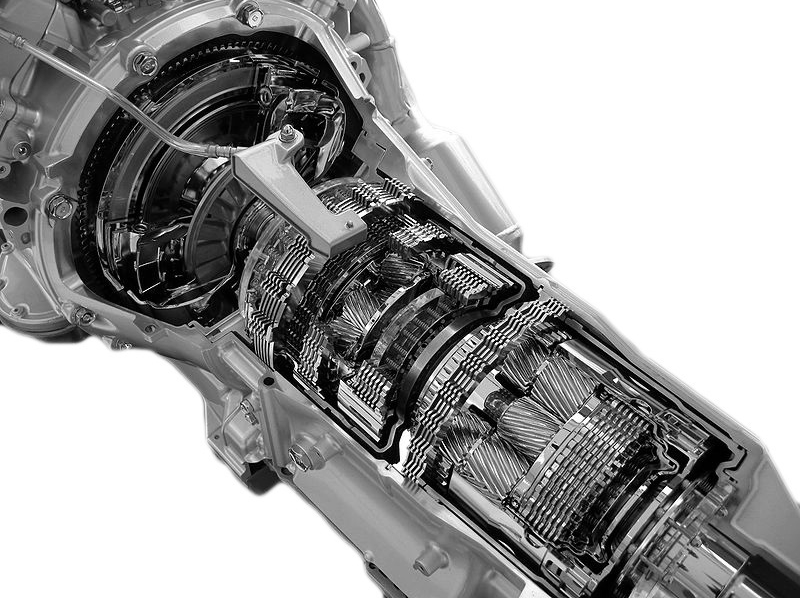
***
Учебные дисциплины
- Инженерная графика
- МДК.01.01. «Устройство автомобилей»
- Общее устройство автомобиля
- Автомобильный двигатель
- Трансмиссия автомобиля
- Рулевое управление
- Тормозная система
- Подвеска
- Колеса
- Кузов
- Электрооборудование автомобиля
- Основы теории автомобиля
- Основы технической диагностики
- Основы гидравлики и теплотехники
- Метрология и стандартизация
- Сельскохозяйственные машины
- Основы агрономии
- Перевозка опасных грузов
- Материаловедение
- Менеджмент
- Техническая механика
- Советы дипломнику
Олимпиады и тесты
- «Инженерная графика»
- «Техническая механика»
- «Двигатель и его системы»
- «Шасси автомобиля»
- «Электрооборудование автомобиля»
Устройство системы
По конструкции такой элемент значительно отличается от традиционной механической КПП.
Устройство имеет три узла:
- блок,
- механизм, используемый для переключения передач,
- гидротрансформатор.
https://youtube.com/watch?v=scb2sASnymM
На масло посредством этого элемента оказывается сильное давление, впоследствии воздействуя на лопатки турбины, а затем происходит передача на вал КПП.
Устройство предусматривает наличие еще одного колеса, которое имеет лопатки. Также располагается достаточно важный элемент, аппарат для спрямления – реактор (статор). Имеет вид кольца, оснащенного профилированными лопатками, которые обеспечивают направление.
С самого начала старта авто, когда водитель еще не успевает отпустить педаль тормоза, реактор находится в состоянии блокировки. После отпускания педали этот элемент вместе с турбиной начинает работать. Когда скорость, с которой вращается турбина, достигает 80% от общей скорости колеса насоса, то реактор перестает работать.
Таким образом, гидромеханическая передача на КПП имеет достаточно сложное устройство, однако это делает ее назначение важным для работы автомобиля и комфорта водителя в целом.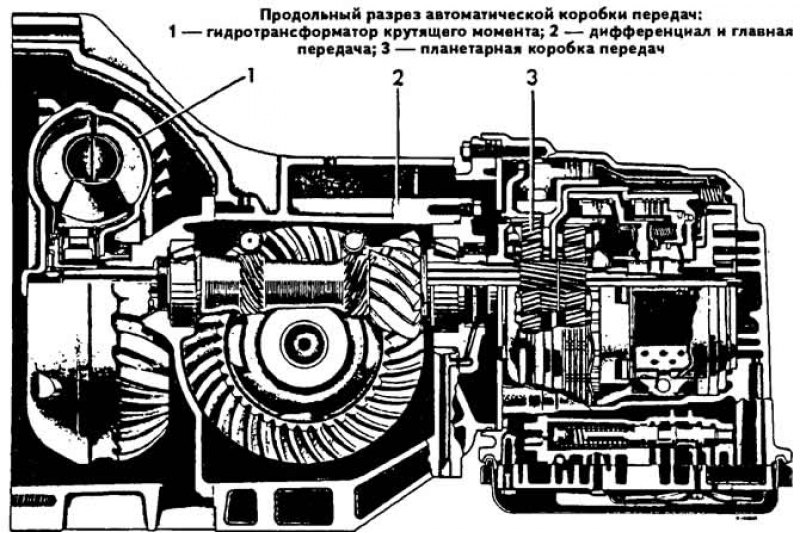
Назначение комбинированной трансмиссии легкового авто
Образ жизни современных водителей существенно меняется и сегодня все больше требований предъявляются к созданию оптимальных комфортных условий во время вождения. Стандартные узлы автомобилей терпят существенные изменения, среди ярких примеров можно выделить комбинирование механической и гидравлической КП. Если говорить о гидромеханической трансмиссии и что это такое, первым делом стоит понять, в чем ее предназначение. Главное отличие заключается в плавном изменении вращающего движения. Облегченное управление позволило отказаться от использования сцепления, поскольку комбинированная КП отвечает за все процессы. При АКПП можно говорить о следующих ситуациях, касающихся управления авто:
- Во время переключения скоростей трансмиссия отключается от силового агрегата.
- Если дорожные условия меняются, величина вращающего момента также будет менять свое значение.
Использование АКПП на авто позволяет получить несколько неоспоримых преимущества. Помимо автоматизации переключения скоростей стоит отметить также повышение эксплуатационных характеристик силового агрегата и коробки и улучшение проходимости транспортного средства в условиях бездорожья.
Помимо автоматизации переключения скоростей стоит отметить также повышение эксплуатационных характеристик силового агрегата и коробки и улучшение проходимости транспортного средства в условиях бездорожья.
Гидравлическая коробка автомат
Конструкция стандартной механической трансмиссии
В большинстве случаев трансмиссия используется для передачи крутящего момента от силового агрегата к рабочим органам. Дополнительно это устройство помогает изменять тяговые усилия, скоростной режим и направление движения транспортного средства.
Конструктивная система трансмиссии достаточно сложная. В нее входят такие элементы, как:
- Сцепление. Оно представляет собой специальный механизм, работа которого основана на силе трения и скольжения. Он используется для передачи крутящего момента, плавного изменения передач и некоторых других функций.
- Коробка передач. Этот агрегат, основное предназначение которого заключается в изменении частоты и крутящего момента на ведущих колесах, используется во всех без исключения транспортных средствах.

- Раздаточная коробка. Она позволяет распределять крутящий момент от ДВС на несколько механизмов посредством использования привода.
- Коробка отбора мощности. Эта система используются для привода имеющихся в машине органов оборудования, что установление на шасси. Для этого применяется карданный вал и гидравлический насос.
- Главная передача. Его основная функция – увязка мощностных характеристик используемого ДВС с конструкцией автомобиля.
- Дифференциал. Этот механизм используется для передачи мощностей. Это происходит посредством того, что он делит единый поток на два дифференциально связанных друг с другом потоки. К тому же он может выполнять аналогичную работу в обратном порядке.
- Карданная передача. Ее основное предназначение – передача крутящего момента между валами, что пересекаются.

Дополнительно в состав трансмиссии может входить много других элементов. Это напрямую зависит от того, на каком конкретном транспортном средстве используется данный механизм. К дополнительным агрегатам относятся такие системы, как шарнир равных угловых скоростей, главный фрикцион, входной редуктор, механизм поворота и т.д.
К дополнительным агрегатам относятся такие системы, как шарнир равных угловых скоростей, главный фрикцион, входной редуктор, механизм поворота и т.д.
Гидромеханическая характеристика
| Влияние расхода жидкости на характеристики ВЗД ( Qj Q2 Qj. |
Гидромеханические характеристики ВЗД при изменении Q и 5, наоборот, располагаются, как правило, параллельно друг другу ( рис. 5.14), следовательно, наклон линий Р — М не зависит от расхода и натяга, таким образом kp является важным параметром гидродвигателя, не изменяющимся в процессе бурения.
При исследовании гидромеханических характеристик распиливающих устройств, применяемых в процессе сепарации, использовано ротатабальное центральное композиционное планирование ( РЦКП) второго порядка. В результате обработки экспериментальных данных были получена уравнения, анализ которых подтвердил практическую необходимость учета характера влияния геометрических и технологических параметров работы распиливающих устройств на их гидромеханические характеристики.
В этом случае безразмерная гидромеханическая характеристика ВЗД постоянна и не искажается при изменении расхода или натяга в паре.
Система пласт-скважина состоит из двух частей, имеющих разные гидромеханические характеристики.
| Компоновочная схема теплообменника при использовании пластин с диагональным потоком ( t — ( 5 — порядковые номера пластин. |
Такое разделение с анализом геометрических параметров дает возможность выявить тепловые и гидромеханические характеристики основных типов пластин.
Ранее нами была получена критериальная зависимость (1.27), являющаяся основой для экспериментального исследования различных гидромеханических характеристик движения смеси вязкопластичной жидкости и газа.
По результатам расчетов строятся гидравлические характеристики трубопроводов ( рис. 36), идущих к соответственным резервуарам, и гидромеханические характеристики насосной установки нефтеперекачивающей станции или танкера.
| Кривая теплоэнергетической эффективности промышленных образцов теплообменных аппаратов при равных условиях нагревания воды. |
Графики, аналогичные приведенному на рис. 104, можно построить для любых форм поверхности теплопередачи и конструкции каналов при наличии их тепловых и гидромеханических характеристик.
Отметим, что в разделе 3 для упрощения анализа не принимались во внимание граничные условия, которым должны удовлетворять возмущенные значения гидромеханических характеристик псевдоожиженного слоя. Граничные условия необходимо выставить на верхней и нижней поверхностях псевдоожиженного слоя, а также на стенках аппарата
Кроме того, необходимо иметь в виду, что образование пузырей может не являться единственным последствием гидромеханической неустойчивости псевдоожиженного слоя. Например, в псевдоожиженных слоях, ожижаемых жидкостью, в которых образование пузырей не наблюдается, вследствие неустойчивости однородного псевдоожиженного слоя может развиваться крупномасштабная циркуляция твердых частиц. Возникновение циркуляционных течений в псевдоожиженном слое может быть описано на основе гидродинамической теории устойчивости подобно тому, как описывается возникновение циркуляционных течений в слое жидкости, подогреваемой снизу , в теории естественной конвекции. При этом необходимо учитывать граничные условия на ограничивающих псевдоожиженный слой поверхностях.
Возникновение циркуляционных течений в псевдоожиженном слое может быть описано на основе гидродинамической теории устойчивости подобно тому, как описывается возникновение циркуляционных течений в слое жидкости, подогреваемой снизу , в теории естественной конвекции. При этом необходимо учитывать граничные условия на ограничивающих псевдоожиженный слой поверхностях.
Опыты, проведенные с некоторыми растворами при различных значениях Аст, показали, что величина статического уровня не оказывает заметного влияния на гидромеханические характеристики исследуемой системы.
Исследователи, изучающие движение газожидкостных смесей, большое внимание уделяют определению величины газона-сыщенности в различных условиях протекания исследуемого процесса, поскольку этот параметр может быть использован для определения основных гидромеханических характеристик системы и позволяет иметь общее представление об особенностях ее движения. Рядом авторов получены экспериментальные выражения для газонасыщенности в тех или иных условиях существования газожидкостной системы
Поэтому полученные формулы газонасыщен-ности определяют ее значение в условиях, определяемых принятыми допущениями и приближениями. Однако в результате исследований выявлено, что в каждом отдельном случае существуют критерии, являющиеся в данных условиях определяющими и в зависимости от которых может быть выражена величина газонасыщенности.
Однако в результате исследований выявлено, что в каждом отдельном случае существуют критерии, являющиеся в данных условиях определяющими и в зависимости от которых может быть выражена величина газонасыщенности.
При 01, Рг1 ( что для газов оправдано) 80т / 8а1 ( что нуждается в обосновании) и для заданных Z можно аналогично однородным потокам полагать, что число Нуссельта является лишь функцией гидромеханических характеристик потока.
Гидромеханическая передача
Применение бесступенчатых гидромеханических передач ( ГМП) с автоматическим управлением является одним из эффективных способов повышения производительности и улучшения основных эксплуатационных показателей самоходных и строительно-дорожных машин.
Корпус гидромеханической передачи автобусов является также передней ее опорой.
Влияние температуры на механическую деструкцию поли-изобутилена ( 7 % — ный раствор полиизобутилена П-20000 в масле. |
В гидромеханической передаче, как уже отмечалось выше, работающая жидкость вследствие высоких скоростей течения в гидротрансформаторе, а также за счет выделения тепла трения на трущихся деталях планетарной — коробки передач нагревается до сравнительно высоких температур порядка 80 — ПО, а в ряде случаев до 130 С.
| Гидродинамическая передача. |
В гидромеханической передаче исключены сцепление и коробка передач, а режим движения машины изменяется без отсоединения передачи от двигателя изменением его частоты вращения, что позволило уменьшить количество органов управления.
В гидромеханических передачах вслед за двигателем устанавливают гидротрансформатор ( вместо муфты сцепления), автоматически изменяющий скорость движения трактора в зависимости от внешней нагрузки. В гусеничных тракторах с электромеханической трансмиссией движение ведущим звездочкам гусениц сообщается тяговым электродвигателем постоянного тока, питаемым от приводимого двигателем трактора генератора, через бортовые фрикционы и редукторы. Система привода дизель-генератор-электродвигатель упрощает кинематическую схему передачи и обеспечивает бесступенчатое регулирование скорости передвижения в широких пределах. Гидромеханическая и электрическая силовые передачи наиболее полно отвечают режиму работы тракторов с прицепным и навесным оборудованием строительных машин.
Система привода дизель-генератор-электродвигатель упрощает кинематическую схему передачи и обеспечивает бесступенчатое регулирование скорости передвижения в широких пределах. Гидромеханическая и электрическая силовые передачи наиболее полно отвечают режиму работы тракторов с прицепным и навесным оборудованием строительных машин.
| Кинематическая схема электропривода лебедки. |
В гидромеханических передачах механические передачи сочетаются с гидродинамическими. В приводе буровых установок преимущественно используют гидротрансформаторы. Гидродинамические муфты применяют реже, так как они требуют более сложной системы управления для глубокого и продолжительного регулирования передаваемого вращающего момента.
Дизель ц гидромеханическая передача расположены н i трехосной тележке, доступ из машинного отделения закрыт капотом.
Комбинированная или гидромеханическая передача представляет собой сочетание гидротрансформатора и планетарной коробки передач.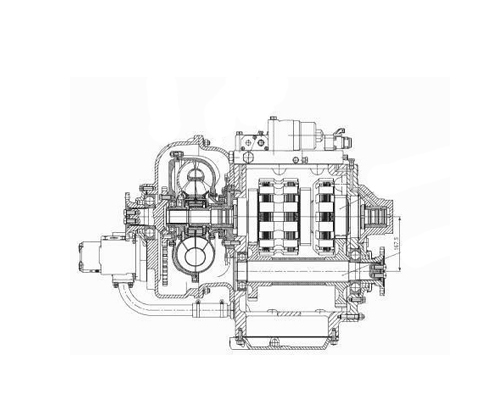 Такая передача заменяет фрикционное сцепление и простую ступенчатую коробку передач.
Такая передача заменяет фрикционное сцепление и простую ступенчатую коробку передач.
Разновидности гидромеханики
Коробки автомат долгое время устанавливались исключительно на автомобили среднего класса и категории премиум. На сегодняшний день агрегат получил массовое использование и пользуется у автолюбителей все большей популярностью. АКПП способны значительно повысить комфорт во время вождения, но стоит учесть, что такие узлы отличаются по разновидностям, каждая из которых имеет свои преимущества и недостатки. Разобравшись в принципе работы гидромеханических коробках передачи, можно будет определиться с выбором, какой тип АКПП подходит конкретному водителю. Стоит упомянуть о следующих типах гидромеханических КП:
- Гидромеханический автомат. Это одна из первых трансмиссий подобного рода, которая появилась как альтернатива «механике». Конструкция представляет собой комбинацию гидротрансформатора и планетарной КП. Наличие электронных компонентов позволяют значительно повысить функциональные особенности агрегата.
- Вариаторная трансмиссия. Пользуется меньшей популярностью из-за того, что отсутствуют привычные фиксированные ступени. К преимуществам можно отнести максимальную плавность хода, а объясняется это как раз отсутствием смены передачей. Конструкция бесступенчатой трансмиссии выглядит следующим образом: для передачи крутящего используется привычный гидравлический преобразователь, а изменение крутящего момента происходит за счет изменения диаметра ведущего и ведомого шкива. Данные компоненты соединяются при помощи ремня и цепи, а изменение диаметра будет зависеть от скорости и нагрузки.
- Роботизированная коробка. Массово начала использоваться около 20 лет назад. От механики отличий немного, имеется сцепление, но разница заключается в том, управление работой сцепления происходит в автоматическом режиме. К преимуществам «робота» можно отнести невысокую стоимость, динамичный разгон и экономию топлива. Что касается недостатков, главным является снижение уровня комфорта.
- Преселективные коробки с двойным сцеплением. К таким относятся устройства DSG или Powershift. Агрегат можно отнести к роботизированным КП, но с более высокими техническими характеристиками. По конструкции напоминает привычную механику, но в этот раз инженеры использовали сразу два агрегата, помещенные в одну коробку.
 К таким относятся устройства DSG или Powershift. Агрегат можно отнести к роботизированным КП, но с более высокими техническими характеристиками. По конструкции напоминает привычную механику, но в этот раз инженеры использовали сразу два агрегата, помещенные в одну коробку.
К таким относятся устройства DSG или Powershift. Агрегат можно отнести к роботизированным КП, но с более высокими техническими характеристиками. По конструкции напоминает привычную механику, но в этот раз инженеры использовали сразу два агрегата, помещенные в одну коробку.Роботизированные агрегаты и АКПП – это устройства, цель которых заключается в упрощении взаимодействия водителя с трансмиссией.
Автоматическая гидромеханическая коробка передач АКПП особенности и отличия
Как уже было сказано выше, АКПП отличается от «коробки-робот» и вариаторных коробок CVT. В первом случае роботизированная КПП фактически является механической коробкой передач, в которой реализована возможность автоматизированного переключения передач при помощи электронных и механических устройств.
Коробка вариатор и вовсе не является коробкой передач в буквальном смысле, так как вариаторные КПП изменяют передаточное число плавно (бесступенчато). Другими словами, ступени (передачи) в устройстве такой коробки отсутствуют, а сам вариатор относится к отдельной разновидности бесступенчатых трансмиссий.
Если же говорить о классической гидромеханической коробке «автомат» (гидромеханическая передача), данный тип трансмиссии предполагает саму автоматическую коробку с планетарными передачами, а также гидротрансформатор (ГДТ).
При этом гидротрансформатор является обязательным элементом, так как гидромеханическая коробка без данного устройства работать не способна. Отметим, что сам ГДТ не участвует в процессе переключения передач, так как играет роль сцепления, передавая крутящий момент от двигателя на входной вал коробки – автомат.
Также гидротрансформатор гасит вибрации и сглаживает толчки при переходе с одной ступени на другую. Однако с учетом таких особенностей (сочетание механики и гидравлики) под автоматической коробкой передач часто понимают оба данных элемента трансмиссии, то есть саму коробку АКПП и гидротрансформатор.
Электронная часть гидромеханической АКПП
Современные автоматические коробки оснащаются электронным управлением, что позволяет выдерживать заданные моменты с более высокой точностью. Если в более старых устройствах речь шла о значении в 6-8%, то КП с электронным управлением выдерживают точность в 1%. Появились новые возможности, исходя из скорости и нагрузки на мотор, компьютер может определить массу транспортного средства и ввести необходимые поправки. Главными компонентами электронной системы управления являются рычаг управления и электронный блок. В данную систему также входят и определенные подсистемы, такие как:
- Подсистема ручного управления.
- Система, вырабатывающая управляемые сигналы.
- Элементы функционирования.
- Автоматическая защита.
- Измерительные узлы.
- Исполнительная система.
Внешний вид роботизированной КП
Функции гидротрансформатора
Гидравлический трансформатор, по сути, являет собой усовершенствованную гидромуфту. Обычная муфта выполняет задачу простого вращения, то в случае АКПП добавляется увеличение крутящего положения. Агрегат выполняет несколько основных функций, одной из которых является демпфирующее действие во время вращательного движения. При постоянной разнице скорости вращения возникают потери, поэтому происходит блокировка, в результате которой вращающий момент начинает передаваться через демпфирующие пружины. Блокировочная муфта выполняет еще одну полезную функцию, предотвращение повышения расхода топлива. Говоря о функциях гидромеханической трансмиссии автомобиля, стоит отметить и некоторые негативные факторы.
Обычная муфта выполняет задачу простого вращения, то в случае АКПП добавляется увеличение крутящего положения. Агрегат выполняет несколько основных функций, одной из которых является демпфирующее действие во время вращательного движения. При постоянной разнице скорости вращения возникают потери, поэтому происходит блокировка, в результате которой вращающий момент начинает передаваться через демпфирующие пружины. Блокировочная муфта выполняет еще одну полезную функцию, предотвращение повышения расхода топлива. Говоря о функциях гидромеханической трансмиссии автомобиля, стоит отметить и некоторые негативные факторы.
Устройство гидротрансформатора
О том, что представляет устройство гидромеханической передачи, можно понять, изучив ее конструкцию. Главным узлами являются гидротрансформатор, механическая КП и механизмы управления. Гидротрансформатор – это главный компонент, а выполняет он практически ту же функцию, что и сцепление. Изучив конструкцию данной детали, можно заметить, что она состоит из трех колес, имеющих специальную форму. Первое колесо – насосное, его назначение выполнять связь между гидравлическим узлом и силовым агрегатом. Второе кольцо – турбинное, оно образует связь с первичным валом коробки. Третье колесо – реакторное, его функция состоит в усилении крутящего момента. Все три компонента закрыты посредством специального корпуса, внутренний объем которого на три четверти заполнен смазочным материалом. От двигателя крутящий момент поступает на насосную часть, затем посредством вращательных движений направляет на турбинное колесо смазочный материал, в результате чего усилие передается на первичный вал. По мере нагрузки гидротрансформатор в автоматическом режиме будет менять момент силы, который в свою очередь, передаваясь к механическим узлам, будет переключаться посредством фрикционных компонентов. Напор жидкости, проходящий от напорного диска к турбине, регулируется также в автоматическом режиме.
Первое колесо – насосное, его назначение выполнять связь между гидравлическим узлом и силовым агрегатом. Второе кольцо – турбинное, оно образует связь с первичным валом коробки. Третье колесо – реакторное, его функция состоит в усилении крутящего момента. Все три компонента закрыты посредством специального корпуса, внутренний объем которого на три четверти заполнен смазочным материалом. От двигателя крутящий момент поступает на насосную часть, затем посредством вращательных движений направляет на турбинное колесо смазочный материал, в результате чего усилие передается на первичный вал. По мере нагрузки гидротрансформатор в автоматическом режиме будет менять момент силы, который в свою очередь, передаваясь к механическим узлам, будет переключаться посредством фрикционных компонентов. Напор жидкости, проходящий от напорного диска к турбине, регулируется также в автоматическом режиме.
Устройство гидротрансформатора
Плюсы и минусы гидромеханики
Автомобили, оснащенные АКПП, обеспечивают более безопасное и комфортное вождение, поскольку предоставляют возможность сконцентрироваться на дороге, не отвлекаясь на лишние действия. Особое преимущество получают начинающие водители, которым трудно использовать механику.
Особое преимущество получают начинающие водители, которым трудно использовать механику.
К преимуществам автоматизированной коробки можно отнести следующее:
- Передачи не нужно переключать вручную;
- Выполняется равномерная подача мощности. Авто, оснащенные АКПП, отличаются плавным ходом во время переключения скоростей.
- В случае с механической КП могут возникнуть трудности с троганием, при резком опускании сцепления двигатель может заглохнуть. В транспортных средствах с «автоматом» данный процесс контролируется электронными компонентами.
У коробки-автомат имеются и свои недостатки, главный из которых – это дороговизна обслуживания. Стоит отметить и высокие требования к условиям эксплуатации. Еще одним минусом является отсутствие возможности завести авто с «толкача», при севшем аккумуляторе.
Гидромеханика – это выбор тех автовладельцев, которые не стеснены в финансовых средствах и не готовы пожертвовать своим комфортом. При грамотном управлении и уходе машина с «автоматом» более надежна и безопасна в управлении.![]()
Гидромеханическая трансмиссия
Для гидромеханических трансмиссий по заданной конструктивной и кинематической схеме машины находят: in — постоянное передаточное число от ведущих колес до выходного вала коробки передач; / 2 — момент инерции вращающихся деталей, приведенный к выходному валу коробки передач, в кгс-м-секг; Jio — момент инерции деталей, связанных с ведущим валом реверса ( с турбинным валом гидротрансформатора) в кгс — м-сек.
Основными недостатками гидромеханической трансмиссии являются сложность и удорожание конструкции, а также повышенный расход топлива.
В реальной же гидромеханической трансмиссии на характер переходного процесса будут дополнительно влиять такие факторы, как упругий гистерезис валов трансмиссии, трение в соединениях, в зубчатых зацеплениях, которые здесь не учитываются, но заметно влияют на динамику системы. Поэтому переходный процесс в гидромеханической тракторной трансмиссии может совершаться не только в области / /, но и в области IV.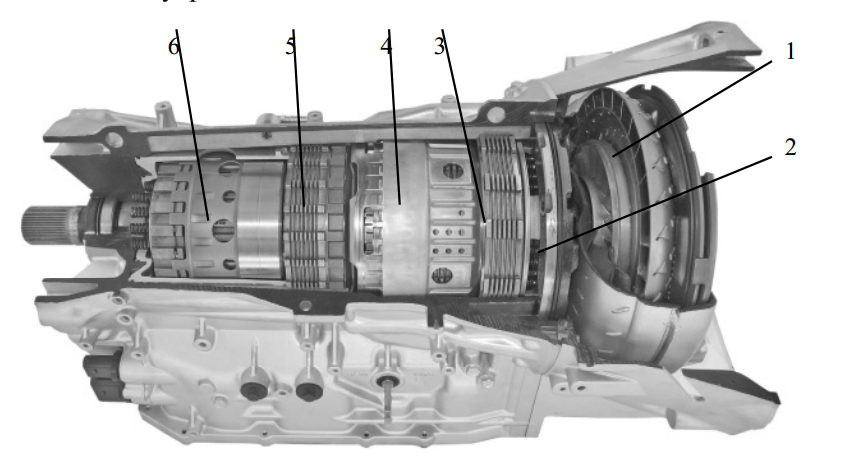 Более того, если переходные процессы связаны с изменением передаточного отношения в большом диапазоне, охватывающем как режим гидромуфты, так и режим трансформации момента, то система в начале переходного процесса будет находиться в одной области, а в конце — в другой. В частности, разгонный процесс начнется в области IV, а закончится в области / /, а процесс торможения, наоборот — начнется в области / /, а закончится в области IV. Если учесть, что переходные процессы при работе ГДТ на режиме гидромуфты носят колебательный затухающий характер ( точки 1, 2 и 4), то смена режима в гидромеханической трансмиссии при разгоне будет носить колебательный характер, а при торможении — монотонный.
Более того, если переходные процессы связаны с изменением передаточного отношения в большом диапазоне, охватывающем как режим гидромуфты, так и режим трансформации момента, то система в начале переходного процесса будет находиться в одной области, а в конце — в другой. В частности, разгонный процесс начнется в области IV, а закончится в области / /, а процесс торможения, наоборот — начнется в области / /, а закончится в области IV. Если учесть, что переходные процессы при работе ГДТ на режиме гидромуфты носят колебательный затухающий характер ( точки 1, 2 и 4), то смена режима в гидромеханической трансмиссии при разгоне будет носить колебательный характер, а при торможении — монотонный.
| Авиационные, компрессорные и турбинные масла. |
Масло ВНИИНП-1 для гидромеханических трансмиссий легковых автомобилей состоит из глубокоочищенного селективной очисткой маловязкого масляного дистиллята, загущенного полиизобутиленом с добавлением антиокислительной, антипенной и противоизносной присадок.
Результаты экспериментальных исследований гидромеханических трансмиссий различных машин как в нашей стране, так и за рубежом показывают, что долговечность отдельных узлов повышается от 50 до 400 % вследствие снижения динамических нагрузок по сравнению со сроком службы их в силовой передаче машины без ГДТ.
Имеются автогрейдеры с гидромеханическими трансмиссиями, в том числе машины с гидродвигателями, вмонтированными в ведущие колеса.
В автогрейдерах с гидромеханической трансмиссией муфта сцепления отсутствует, поэтому машину трогают с места после включения передачи при отпущенной педали ножного тормоза.
На базовых машинах применяются механические и гидромеханические трансмиссии. Последние получили преимущественное распространение. Базовые машины, как правило, должны быть снабжены независимым приводом для отбора мощности. Желательно иметь отбор мощности в нескольких точках.
Ниже рассматриваются отдельные узлы фрикционно-зубчатых и гидромеханических трансмиссий.
При движении автомобилей с гидромеханической трансмиссией ( например, БелАЗ — 540А или БелАЗ — 548А) по дорогам Ш — п и IV — n категорий с затяжным уклоном более 60 % о следует проверять возможность непрерывного движения в грузовом направлении без перегрева двигателя и гидротрансформатора.
Выпускают также автогрейдеры с гидромеханической трансмиссией.
| Влияние анилиновой точки масла на степень набухания резины. |
Масло ГТМ-3 разрабатывалось специально для гидромеханических трансмиссий автомобилей Московского автомобильного завода им. Основу масла составила узкая фракция с пределами выкипания 144 — 190 С, выделенная из масла индустриального.
Масло ГТМ-3 разрабатывалось специально для гидромеханических трансмиссий автомобилей Московского автомобильного завода им. Основу масла составила узкая фракция с пределами выкипания 144 — 190Р С, выделенная из масла индустриального.
Основу масла составила узкая фракция с пределами выкипания 144 — 190Р С, выделенная из масла индустриального.
Гидромеханическая коробка передач. Автотранспортные средства. Эксплуатация автомобилей. Электронная библиотека учебных материалов. Чертежи, пояснительные записки, методические указания, книги и др. Бесплатно!
Основным неудобством при использовании механических ступенчатых коробок передач является то, что водителю для переключения передач постоянно приходится нажимать на педаль сцепления и перемещать рычаг переключения передач. Это требует от него затрат значительных физических сил, особенно в условиях городского движения или и при управлении автомобилем, работающим с частыми остановками, Для устранения таких неудобств и облегчения работы водителя легкового автомобиля все более широкое применение получают гидромеханические коробки передач. Они выполняют одновременно функции сцепления и коробки передач с автоматическим или полуавтоматическим переключением передач. При гидромеханической коробке передач управление движением автомобиля осуществляется педалью подачи топлива и при необходимости тормозной педалью.
При гидромеханической коробке передач управление движением автомобиля осуществляется педалью подачи топлива и при необходимости тормозной педалью.
Гидромеханическая коробка передач состоит из гидротрансформатора и механической коробки передач. На легковых автомобилях наибольшее распространение получили гидромеханические коробки с планетарными механическими коробками. Их преимущества: компактность конструкции, меньшая металлоемкость и шумность, больший срок службы. К недостаткам относятся сложность, высокая стоимость, пониженный КПД. Переключение передач в этих коробках производится при помощи фрикционных муфт и ленточных тормозных механизмов. При этом при включении одной передачи часть фрикционных муфт и ленточных тормозных механизмов пробуксовывает, что также снижает их КПД.
Гидротрансформатор (рис. 1) представляет собой гидравлический механизм, который размещен между двигателем и механической коробкой передач. Он состоит из трех колес с лопатками: насосного (ведущего), турбинного (ведомого) и реактора. Насосное колесо 3 закреплено на маховике 1 двигателя и образует корпус гидротрансформатора, внутри которого размещены турбинное колесо 2, соединенное с первичным валом 5 коробки передач, и реактор 4, установленный на роликовой муфте 6 свободного хода. Внутренняя полость гидротрансформатора на 3/4 своего объема заполнена специальным маслом малой вязкости.
Насосное колесо 3 закреплено на маховике 1 двигателя и образует корпус гидротрансформатора, внутри которого размещены турбинное колесо 2, соединенное с первичным валом 5 коробки передач, и реактор 4, установленный на роликовой муфте 6 свободного хода. Внутренняя полость гидротрансформатора на 3/4 своего объема заполнена специальным маслом малой вязкости.
Рисунок 1 — Гидротрансформатор:
а – общий вид; б – схема; 1 – маховик; 2 – турбинное колесо; 3 – насосное колесо; 4 – реактор; 5 – вал; 6 – муфта
При работающем двигателе насосное, колесо вращается вместе с маховиком двигателя. Масло под действием центробежной силы поступает к наружной части насосного колеса, воздействует на лопатки турбинного колеса и приводит его во вращение. Из турбинного колеса масло поступает в реактор, который обеспечивает плавный и безударный вход жидкости в насосное колесо и существенное увеличение крутящего момента. Таким образом, масло циркулирует по замкнутому кругу и обеспечивается передача крутящего момента в гидротрансформаторе.
Характерной особенностью гидротрансформатора является увеличение крутящего момента при его передаче от двигателя к первичному валу коробки передач. Наибольшее увеличение крутящего момента на турбинном колесе гидротрансформатора получается при трогании автомобиля с места. В этом случае реактор неподвижен, так как заторможен муфтой свободного хода. По мере разгона автомобиля увеличивается скорость вращения насосного и турбинного колес. При этом муфта свободного хода расклинивается и реактор начинает вращаться с увеличивающейся скоростью, оказывая все меньшее влияние на передаваемый крутящий момент. После достижения реактором максимальной скорости вращения гидротрансформатор перестает изменять крутящий момент и переходит на режим работы гидромуфты. Таким образом, происходит плавный разгон автомобиля и бесступенчатое изменение крутящего момента.
Гидротрансформатор автоматически устанавливает необходимое передаточное число между коленчатым валом двигателя и к ведущими колесами автомобиля, Это обеспечивается следующим образом: с уменьшением скорое вращения ведущих колес автомобиля при возрастании сопротивления движению возрастает динамический напор жидкости от насоса на турбину, что приводит к росту крутящего момента на турбине, следовательно на ведущих колесах автомобиля.
Планетарная коробка передач включает в себя планетарные механизмы. В простейшем планетарном механизме (рис. 2) солнечная шестерня 6, закрепленная ведущем валу 1, находится в зацеплении с шестернями-сателлитами 3, свободно установленными на своих осях. Оси сателлитов закреплены на водиле 4, жестко соединенном с ведомым валом 5, а сами сателлиты находятся и зацеплении с коронной шестерней 2, имеющей внутренние зубья.
Рисунок 2 — Планетарный механизм:
1 – ведущий вал; 2 – коронная шестерня; 3 – сателлиты; 4 – водило; 5 – ведомый вал; 6 – солнечная шестерня; 7 – тормоз
Передача крутящего момента с ведущего вала 1 на ведомый вал 5 возможна только при заторможенной коронной шестерне 2 при помощи ленточного тормоза 7. В этом случае при вращении шестерни 6 сателлиты 3, перекатываясь по зубьям неподвижной шестерни 2, начнут вращаться вокруг своих осей и одновременно через водило 4 будут вращать ведомый вал 5.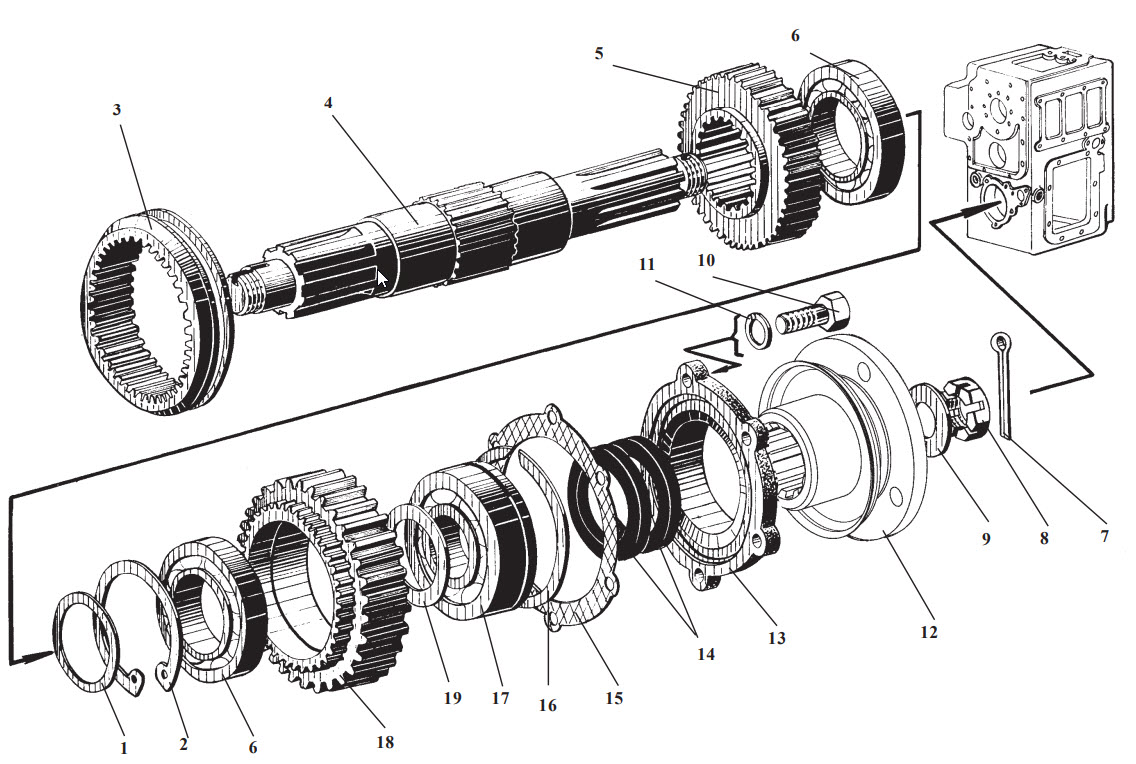 При растормаживании шестерни 2 сателлиты 3, свободно перекатываясь по шестерне 6, будут вращать шестерню 2, а вал 5 будет оставаться неподвижным.
При растормаживании шестерни 2 сателлиты 3, свободно перекатываясь по шестерне 6, будут вращать шестерню 2, а вал 5 будет оставаться неподвижным.
Двухступенчатая гидромеханическая коробка передач легкового автомобиля (рис. 3) состоит из гидротрансформатора 1, механической планетарной коробки передач с многодисковым фрикционом 3 и двумя ленточными тормозными механизмами 2 и 4 и гидравлической системы управлениях кнопочным переключением передач. Кнопки соответственно означают нейтральное положение, задний ход, первую передачу и движение с автоматическим переключением передач. В двухступенчатой механической коробке передач имеются два одинаковых планетарных механизма 5 и 6.
Рисунок 3 — Гидромеханическая коробка передач:
1 – гидротрансформатор; 2,4 – тормозные механизмы; 3 – фрикцион; 5,6 – планетарные механизмы
В нейтральном положении фрикцион 3, а также тормозные механизмы 2 и 4 выключены. Трогание автомобиля с места происходит при включенной первой передаче. В этом случае масло под давлением поступает в цилиндр тормозного механизма 2, лента которого затягивается, и солнечная шестерня планетарного механизма 6 останавливается.
В этом случае масло под давлением поступает в цилиндр тормозного механизма 2, лента которого затягивается, и солнечная шестерня планетарного механизма 6 останавливается.
Если включена кнопка «Движение», то при разгоне автомобиля происходит автоматическое переключение на вторую передачу, что обеспечивается одновременным выключением тормозного механизма 2 и включением фрикциона 3. В этом случае планетарные механизмы 5 и 6 блокируются и вращаются как одно целое.
Для движения автомобиля задним ходом включается только тормозной механизм 4.
История создания гидромеханической коробки передач ЛАЗ-НАМИ-035 для городского автобуса ЛАЗ-695 «Львов»
«Автомат» для автобуса
В середине июля 1955 г. Львовский автобусный завод обратился в НАМИ с письмом с предложением разработать автоматическую коробку передач для автобуса ЛАЗ.
В конце 1956 г. была проведена разработка эскизной компоновки гидромеханической коробки передач для городского автобуса «Львов» (ЛАЗ-695). В этот период КБ автоматических трансмиссий НАМИ уже закончило первый этап испытаний автоматических коробок передач для самосвала МАЗ-525 и «Москвич». Для автомобиля «Москвич» были изготовлены и испытаны коробки передач второго варианта – АК-5. Схема этой коробки была признана наиболее рациональной для автоматической коробки передач автобуса ЛАЗ. В 1957 г. была произведена разработка технического и рабочего проекта коробки.
В этот период КБ автоматических трансмиссий НАМИ уже закончило первый этап испытаний автоматических коробок передач для самосвала МАЗ-525 и «Москвич». Для автомобиля «Москвич» были изготовлены и испытаны коробки передач второго варианта – АК-5. Схема этой коробки была признана наиболее рациональной для автоматической коробки передач автобуса ЛАЗ. В 1957 г. была произведена разработка технического и рабочего проекта коробки.
Первые опытные экземпляры изготовили в НАМИ на Заводе опытных конструкций. Их изготовление началось в августе 1957 г. Первый экземпляр был готов в марте 1958 г. В апреле были закончены еще три коробки передач.
Автоматическая коробка передач 035 состояла из гидротрансформатора и механического редуктора, который имел две ступени переднего хода и задний ход. На 1-й передаче работал гидротрансформатор с пониженной передачей в редукторе. На 2-й передаче включалась прямая передача в редукторе. А 3-й режим работы коробки заключался в блокировке одноступенчатого, так называемого «полупрозрачного» гидротрансформатора с максимальным коэффициентом трансформации 2,8. В дальнейшем предполагалось испытать коробку с двухступенчатым «прозрачным» гидротрансформатором НАМИ. Блокировка турбинного и насосного колеса гидротрансформатора осуществлялась фрикционом, замыкаемым давлением масла.
В дальнейшем предполагалось испытать коробку с двухступенчатым «прозрачным» гидротрансформатором НАМИ. Блокировка турбинного и насосного колеса гидротрансформатора осуществлялась фрикционом, замыкаемым давлением масла.
Механический редуктор был выполнен по схеме с неподвижными осями, как обычные механические коробки передач. На внутреннем конце первичного вала находился корпус двойного фрикциона со стальными дисками, ведомые диски были покрыты слоем металлокерамики.
Коробка передач оснащалась дублирующим независимым ручным переключением передач. Это должно было обеспечить безопасность движения по скользким дорогам и на подъемах. Все переключения передач производились без сброса газа.
Гидромеханическая коробка передач давала возможность заводить двигатель буксировкой автобуса, тормозить двигателем на любой передаче, а также обеспечивала движение накатом. Для этого в конструкции коробки передач было предусмотрено два шестеренчатых масляных насоса. «Передний» – большой масляный насос внутреннего зацепления приводился от двигателя с помощью насосного колеса гидротрансформатора. «Задний» – малый масляный насос наружного зацепления приводился от промежуточного вала редуктора, который всегда имел связь с выходным валом. На другом конце промежуточного вала помещался центробежный регулятор автоматического управления коробкой передач. Работа насосов регулировалась редукционным клапаном. Рабочее давление в масляной системе составляло 4 атм. При неподвижном автомобиле или движении с низкой скоростью давление создавалось большим насосом. Насос малой производительности использовался при буксировке и движении с высокой скоростью, когда насос большой производительности отключался автоматически от напорной магистрали.
«Задний» – малый масляный насос наружного зацепления приводился от промежуточного вала редуктора, который всегда имел связь с выходным валом. На другом конце промежуточного вала помещался центробежный регулятор автоматического управления коробкой передач. Работа насосов регулировалась редукционным клапаном. Рабочее давление в масляной системе составляло 4 атм. При неподвижном автомобиле или движении с низкой скоростью давление создавалось большим насосом. Насос малой производительности использовался при буксировке и движении с высокой скоростью, когда насос большой производительности отключался автоматически от напорной магистрали.
С целью уменьшения веса коробки передач ее картер и крупные крышки, а также колеса гидротрансформаторов отливались из алюминиевого сплава МКЦС-3.
Первоначально в гидромеханическую коробку передач было залито веретенное масло АУ. Последняя стадия стендовых испытаний проводилась уже с опытным маслом ВНИИНП-В-1. Всего коробка отработала на стенде 91 ч.
Обкатка и отладка коробки на стенде, снятие характеристик происходили в период с 8 марта по 28 июля 1958 г. Затем первый опытный образец автоматической коробки передач был установлен на предоставленный Львовским автобусным заводом автобус, имевший на тот момент пробег свыше 75 тыс. км. Предоставленный автобус ЛАЗ-695 оснастили новым двигателем ЗИЛ-158Л мощностью 109 л.с., полученным с ЛАЗа. Другого автобуса ЛАЗ предоставить не мог. Из-за того что коробка передач НАМИ-035 была рассчитана на мощность двигателя 150–180 л.с. с крутящим моментом 42–45 кгм, снять характеристики коробки с двигателем не представлялось возможным. На двигатель мощностью 152 л.с. (ЗИЛ-111) рассчитывались тяговые характеристики трансформатора коробки передач, на 180 л.с. – был выполнен прочностный расчет коробки. Для двигателя мощностью 109 л.с. должен был применяться гидротрансформатор с меньшими колесами. Изготовить такие колеса в короткий срок не представлялось возможным. Львовский завод со своей стороны обещал предоставить двигатель требуемой мощности к концу года.
Автоматическая коробка передач должна была получить дистанционно-электрическое управление золотниковым устройством. Установленная на автобусе гидромеханическая коробка передач получила временное механическое управление, имевшееся на автобусе. Управление осуществлялось с помощью рычага, двигающегося в фигурной прорези направляющей планки. Рычаг имел шесть фиксированных положений: «З.Х.» – задний ход, «Н» – нейтраль, 1, 2, 3 – передачи и «А» – автоматическое переключение. При торможении двигателем водитель мог включить низшую передачу, однако включать первую передачу следовало при скорости меньше 35 км/ч. Для движения накатом коробку передач нужно было перевести в режим «нейтраль». Однако после этого ни одна из передач не включалась, пока скорость автобуса не упадет до 45 км/ч.
Когда двигатель заводился буксировкой, включалась 3-я передача, хотя допускалось включение 2-й.
Из-за выступающего механизма управления пол над коробкой передач пришлось поднять на 70 мм. Контроль переключения передач производился с помощью манометров.
На этом автобусе были совершены пробеги в Ярославль и по маршруту Москва–Минск–Львов–Киев–Москва. Кроме того, автобус испытывался с полной нагрузкой с имитацией движения по маршруту (остановки через каждый километр) пробегом 2500 км. Путь в 65 км автобус проехал в городском режиме по московскому маршруту № 87 НАМИ – Площадь Свердлова. Переключение с 1-й передачи на 2-ю производилось на скорости 10–23 км/ч в зависимости от положения дроссельной заслонки; со 2-й на 3-ю – 23–33 км/ч.
В 1959 г. проходили стендовые и ходовые испытания четырех образцов автоматической коробки передач НАМИ-035. Две коробки передач были установлены на автобусы ЛАЗ-695, третий образец, при участии Ликинского автобусного завода – на автобус ЛиАЗ-158, четвертый образец установили на макет автобуса-троллейбуса ЗИУ. Сконструированное дистанционное электроуправление и пневматический включатель заднего хода позволили освободиться от применяемого на первом автобусе сложного и тяжелого механического управления. Был сделан ряд других усовершенствований. Переработанные чертежи, согласно которым разработанная коробка передач становилась не только лучше для эксплуатации и надежней, но и меньше в размерах, были отправлены на завод.
В 1962 г. с участием НАМИ была выпущена опытная партия из десяти штук гидромеханических коробок передач ЛАЗ-НАМИ-035. Изготовленные коробки передач прошли испытания. В 1964 г. производство гидромеханической передачи было освоено Львовским автобусным заводом. Автоматические коробки передач стали устанавливать на автобусы модели ЛАЗ-965Ж, выпускающиеся малой серией. Затем гидромеханические коробки появились на автобусах ЛиАЗ-677, когда, наконец, приступили к их производству.
Производители Коробки передач (гидромеханическая передача) из России
Продукция крупнейших заводов по изготовлению Коробки передач (гидромеханическая передача): сравнение цены, предпочтительных стран экспорта.
- где производят Коробка передач (гидромеханическая передача)
- ⚓ Доставка в порт (CIF/FOB)
- Коробка передач (гидромеханическая передача) цена 30.07.2021
- 🇬🇧 Supplier’s Gearbox (hydromechanical transmission) Russia
Страны куда осуществлялись поставки из России 2018, 2019, 2020, 2021
- 🇰🇿 КАЗАХСТАН (31)
- 🇺🇦 УКРАИНА (23)
- 🇧🇾 БЕЛАРУСЬ (4)
- 🇦🇲 АРМЕНИЯ (3)
- 🇨🇺 КУБА (3)
- 🇲🇳 МОНГОЛИЯ (3)
- 🇲🇩 МОЛДОВА, РЕСПУБЛИКА (2)
- 🇺🇿 УЗБЕКИСТАН (2)
- 🇩🇪 ГЕРМАНИЯ (1)
- 🇱🇻 ЛАТВИЯ (1)
- 🇵🇱 ПОЛЬША (1)
- 🇪🇪 ЭСТОНИЯ (1)
- 🇿🇦 ЮЖНАЯ АФРИКА (1)
- 🇦🇿 АЗЕРБАЙДЖАН (1)
- 🇱🇹 ЛИТВА (1)
Выбрать Коробку передач (гидромеханическая передача): узнать наличие, цены и купить онлайн
Крупнейшие экспортеры из России, Казахстана, Узбекистана, Белоруссии, официальные контакты компаний. Через наш сайт, вы можете отправить запрос сразу всем представителям, если вы хотите купить
Коробку передач (гидромеханическая передача).
🔥 Внимание: на сайте находятся все крупнейшие российские производители Коробки передач (гидромеханическая передача), в основном производства находятся в России. Из-за низкой себестоимости, цены ниже, чем на мировом рынке
Поставки Коробки передач (гидромеханическая передача) оптом напрямую от завода изготовителя (Россия)
Крупнейшие заводы по производству Коробки передач (гидромеханическая передача)
Заводы по изготовлению или производству Коробки передач (гидромеханическая передача) находятся в центральной части России. Мы подготовили для вас список заводов из России, чтобы работать напрямую и легко можно было купить Коробка передач (гидромеханическая передача) оптом
коробки передач
Изготовитель Коробки передач
Поставщики Жидкости для гидравлических целей
Крупнейшие производители Машины и механические приспособления
Экспортеры —
Компании производители сцепления в сборе и его части для моторных транспортных средств товарных позиций —
Производство —
Изготовитель Другие вариаторы скорости
Поставщики Масло для шестерен и масло для редукторов
Крупнейшие производители Прочее оборудование для фильтрования или очистки жидкостей
Экспортеры Зубчатые колеса
#читайдома: как работает автомобильная коробка передач
Сегодня в автомобилях используют коробки передач разных типов, радикально отличающихся по конструкции — каждая со своими достоинствами и недостатками. Но для начала давайте ответим на самый важный вопрос…
Зачем вообще автомобилю нужна коробка передач?
Из-за особенностей работы ДВС. При низких оборотах ему не всегда хватает сил (крутящего момента) вращать колёса и двигать автомобиль. Чтобы помочь мотору, нужно дать ему возможность при маленькой скорости движения машины крутиться быстрее — для этого двигатель соединяют с колёсами через передачу.
Простейшая передача — это две шестерни разного размера, сцепленные зубьями. Представьте, что у одной зубьев в три раза больше, чем у другой. Тогда за один оборот большой шестерни малая сделает уже три оборота. И напротив, соединив двигатель с маленькой шестернёй, а колёса — с большой, мы заставим их крутиться в три раза медленнее коленвала. Ещё один плюс: крутящий момент, вращающий колёса, тоже будет в три раза выше крутящего момента двигателя.
Но когда скорость автомобиля возрастёт вдвое, обороты мотора увеличатся уже в шесть раз. А он не может вращаться слишком быстро — топливо просто не будет успевать сгорать. Поэтому по мере разгона двигателю потребуется другая пара шестерён — с менее кардинальной разницей в количестве зубьев (её называют передаточным отношением). В современных легковых автомобилях 5–6 разных передач (или ступеней), а у некоторых и девять. А коробка передач — это агрегат, в котором все они собраны вместе.
То есть коробка передач — это просто набор шестерён?
И да, и нет. В реальности всё сложнее. Помимо самих передач нужны ещё механизмы, которые позволяют эти передачи менять. Да и шестерни — лишь один из видов передач. За сто с лишним лет существования автомобилей придумано множество механизмов — от простейших шкивов, между которыми перебрасывался приводной ремень (подобно тому, как это делается с цепью на велосипедах), до совсем экзотических конструкций. И сегодня в автомобилях используют четыре типа коробок передач: механическую, гидромеханическую, роботизированную и вариатор. Каждая работает по-своему.
Введение в гидромеханические трансмиссии
Стоимость топлива и топливосберегающие характеристики бесступенчатых трансмиссий (CVT) увеличили давление, чтобы обеспечить возможность CVT все более и более крупной внедорожной техники. Архитектура гидромеханической трансмиссии позволяет меньшим гидравлическим компонентам обеспечивать экономичную работу вариатора для более крупных машин. В результате количество гидромеханических трансмиссий на рынке растет.
Схема гидромеханической трансмиссии концептуально проста с двумя параллельными трактами мощности ( Рис. 1 ). Гидравлический тракт состоит из насоса и двигателя, называемого здесь «вариатором». Механический путь обычно представляет собой вал с одной или двумя шестернями. Эти пути связаны с обычными компонентами механической трансмиссии, такими как шестерни, валы, муфты и, по крайней мере, одна планетарная передача. Возможностей подключения очень много.В данном проекте именно детали этих взаимосвязей составляют основную часть интеллектуальной собственности и пригодности для целевого машинного приложения.
Гидромеханические трансмиссии используются в сельскохозяйственных тракторах давно. Они либо стандартны, либо предлагаются в качестве опции ( Рис. 2 ).
Гидромеханические трансмиссии до сих пор обычно не использовались в землеройном оборудовании. Считается, что сегмент колесных погрузчиков получит наибольшую выгоду от вариатора, и именно здесь можно найти последние предложения.Примеры в Fig. 3 были анонсированы и доступны сейчас или будут в ближайшее время.
Данные конструкции различаются по трем причинам:
- Первый — это конструкция вариатора и его расположение, например, насос переменного рабочего объема с наклонной шайбой, двигатель постоянного рабочего объема с наклонной осью, установленный внутри.
- Второй — тип муфты. Общие термины — это входное соединение, выходное соединение и составное разделение.Хотя подробности этой номенклатуры выходят далеко за рамки данной статьи, в ней обычно описывается, подключен ли входной или выходной вал трансмиссии напрямую через передаточное число к одному из валов вариатора. В случае составного разъема ни один из валов вариатора не подсоединяется напрямую.
- Третий — количество диапазонов или режимов. Это количество различных механических взаимосвязей между механическими и гидравлическими путями за счет включения и выключения любых муфт в системах передач.Обратите внимание, что тип связи не обязательно одинаков для каждого диапазона или режима.
Рассмотрим топливную карту двигателя, показанную на рис. 4 . По вертикальной оси отложена мощность двигателя, по горизонтальной оси — частота вращения двигателя. Пик каждого контура указывает максимальную мощность двигателя для данного расхода топлива. Геометрическое место этих пиков определяет наилучшую скорость двигателя при минимальном расходе топлива.
Рассмотрим трансмиссию, описанную в Рис.5 . График в нижней части рисунка показывает, что для любой данной путевой скорости возможны только одна или две скорости вращения двигателя. Маловероятно, что одна из этих скоростей попадает в линию минимального расхода топлива Рис. 4 . Кроме того, ожидаемые изменения нагрузки, особенно если возникают какие-либо трудности с изменением передаточного числа, могут побудить оператора выбрать более высокую частоту вращения двигателя (более высокий расход топлива) и / или более низкую путевую скорость (более медленное время цикла).
Рассмотрим трансмиссию на рис.6 . График в нижней части рисунка показывает, что для данной путевой скорости возможна почти любая частота вращения двигателя и, следовательно, она может соответствовать частоте вращения двигателя с минимальным расходом топлива, показанной на рис. 4 . Линии оборотов двигателя из графика рис. 5 включены для справки. Поскольку современные гидромеханические вариаторы так хорошо меняют передаточное число, проблем с изменением нагрузки, как, например, может быть с дискретными ступенчатыми трансмиссиями, мало, если они вообще возникают.
Хотя информация в этой статье может не подготовить вас к проектированию гидромеханической трансмиссии, она позволит вам легче распознать их и их потенциальные преимущества.
ОБ АВТОРЕ: Майк Кронин всю свою карьеру проработал в Caterpillar, работая над внедорожными трансмиссиями, в первую очередь проектированием и разработкой нескольких гидромеханических трансмиссий и систем рулевого управления для гусеничных машин. Он вышел на пенсию в 2010 году, но продолжает работать в компании Caterpillar на неполной ставке. В настоящее время он имеет 23 патента в области трансмиссии.
Комплексное управление гидромеханической регулируемой трансмиссией
Гидромеханическая регулируемая трансмиссия (HMT) имеет преимущества непрерывного изменения и высокой эффективности.Так что это одна из идеальных трансмиссий для тяжелых автомобилей. Процесс непрерывного изменения скорости включает в себя регулирование скорости в диапазоне и сдвиг диапазона. В данной статье предлагается интегрированная стратегия управления HMT. Получен алгоритм стратегии управления скоростью асимметричной насыщенной инкрементальной пропорциональной интегральной производной (ПИД) в условиях диапазона и сдвига диапазона. В этой статье представлена логика переключения диапазонов и стратегии управления переключением диапазонов. Модель контроллера создается в Matlab Simulink и симулируется с моделью транспортного средства, оснащенного двухдиапазонным HMT.Создан прототип HMT-платформы аппаратного моделирования (HILS) интегрированной стратегии управления. Результаты HILS показывают, что процесс переключения диапазона плавный и колебаний скорости не происходит. На стадии стабилизации дроссельной заслонки частота вращения двигателя регулируется до близкой к оптимальной, а правила ее изменения соответствуют результатам моделирования. Стратегия интегрированного контроля разумна.
1. Введение
С развитием автомобильной промышленности заказчики повышают требования к комфорту и топливной экономичности.Передачи важны для удовлетворения требований [1, 2].
Основные характеристики и характеристики передаточного числа HMT показаны на рисунке 1. Входная мощность делится на две части: гидравлическую мощность и механическую мощность в блоке разделения мощности. Гидравлическая трансмиссия включает в себя гидравлический насос переменного рабочего объема и двигатель постоянного рабочего объема. Изменяя рабочий объем насоса, скорость двигателя постоянно изменяется от минимальной (отрицательной) до максимальной (положительной), что определяется как ход.Каждый ход соответствует рабочему режиму механической трансмиссии, который определяется как диапазон. Наконец, два потока мощности сходятся в непрерывно регулируемый поток мощности в блоке слияния.
(a) Основы HMT
(b) Характеристики передаточного числа
(a) Основы HMT
(b) Характеристики передаточного числа
HMT — новая бесступенчатая трансмиссия. Это заставляет двигатель работать в высокоэффективной области, поэтому он имеет преимущество высокой эффективности.И он мог передавать большую нагрузку, чем бесступенчатая трансмиссия ременного типа (CVT). Следовательно, HMT — одна из идеальных трансмиссий для большегрузных автомобилей [3]. И его успешно применяли на большегрузных автомобилях [4–6].
На основе большого количества исследований по проектированию и моделированию HMT был разработан ряд методов проектирования и анализа. Линарес и др. [5] объяснил основы всех типов трансмиссии CVT и описал конструктивные параметры и основы системы разделения мощности.Макор и Россетти [7] оптимизировали конструкцию HMT и получили хорошую сходимость по скорости и высокий средний КПД. Чтобы разработать систему управления HMT, Чжан и Чжуо [8] построили модель HMT, используя принцип динамики. Choi et al. [9] провели тренажер трактора с ГМТ в режимах работы и движения. И скорость трактора, и частота вращения двигателя могли поддерживаться на желаемых значениях. По сравнению с технологиями проектирования и анализа HMT, контроль HMT все еще находится на ранней стадии разработки.
Процесс изменения скорости состоит из регулирования скорости по диапазону и смещения диапазона. Следовательно, необходимо регулировать скорость в диапазоне, время переключения диапазона и методы переключения. Множество исследований было посвящено регулированию скорости в диапазоне и компонентах управления. Юань и др. [10] и Wei et al. [11] разработал ПИД-регулятор с переменным параметром и изучил систему управления скоростью на HMT. В их исследованиях может быть реализовано отслеживание соотношения скоростей цели. Но их исследования были сосредоточены только на регулировании передаточного числа по дальности.Hu et al. [12] исследовали возможность переключения без отключения электроэнергии. Чжан и Чжо [13] представили метод изменения скорости и сдвига диапазона для достижения самого широкого диапазона скоростей и избежания повторяющегося переключения. Savaresi et al. [14] разработали систему управления, включающую сервоконтроллер на клапане, сервоконтроллер на гидравлическом передаточном числе и синхронизатор. Но улучшение характеристик трактора было достигнуто только за счет замены нынешних насосов / двигателей и датчиков скорости. Tanelli et al. [15] разработали систему управления для трактора, оснащенного HMT, включающую управление переключением одного и двух диапазонов сцепления, а также улучшенное качество переключения.В статье представлен комплексный метод управления HMT. Модель контроллера создается в Matlab Simulink и симулируется с моделью транспортного средства, оснащенного HMT. Проведен тест HILS HMT.
2. Стратегия интегрированного управления HMT
Двухдиапазонный HMT показан на рисунке 2 и процитирован для иллюстрации метода управления. Двухдиапазонный HMT включает в себя три планетарных редуктора (, и), два тормоза (), один насос переменного рабочего объема () и один двигатель постоянного рабочего объема ().На рисунке 2 это входная скорость HMT и выходная скорость HMT. Когда тормоз включен, а тормоз отпущен, планетарный ряд работает, а HMT работает в гидравлическом диапазоне (). Когда тормоз включен и тормоз отпущен, планетарный редуктор включается и работает, а HMT работает в гидромеханическом диапазоне (HM).
Скоростные характеристики HMT состоят из нескольких связанных бесступенчато регулируемых диапазонов. Следовательно, интегрированная стратегия управления должна включать управление скоростью в диапазоне, логику переключения диапазона, условия переключения диапазона и стратегии управления переключением.
Скорость HMT регулируется в зависимости от скорости автомобиля и открытия дроссельной заслонки. HMT заставляет двигатель и транспортное средство работать различными способами в соответствии с выбранным режимом для достижения ожидаемых характеристик.
3. Стратегия управления скоростью в диапазоне
Стратегия управления скоростью в диапазоне изменяет управляющий ток гидравлического насоса в соответствии с разницей между частотой вращения двигателя и идеальной скоростью. Стратегия регулирования скорости в диапазоне изучалась в течение многих лет, в основном в области ПИД-регулирования, управления отслеживанием передаточного числа и т.д. [10–13].
В определенных дорожных условиях ускорение автомобиля с HMT ограничивается крутящим моментом двигателя и максимальным крутящим моментом двигателя. Максимальный крутящий момент двигателя определяется максимальным давлением при условии, что двигатель выбран.
Когда ошибка между фактической частотой вращения двигателя и целевой скоростью больше во время ускорения транспортного средства, градиент диапазона управляющего тока насоса переменного рабочего объема увеличивается в соответствии с алгоритмом PID. И градиент скорости вращения двигателя и сопротивление ускорению транспортного средства увеличиваются, из-за чего гидравлический блок теряет способность ускорять транспортное средство после того, как давление поднимается до максимального давления.Следовательно, когда автомобиль ускоряется, необходимо установить верхний предел насыщения. Когда транспортное средство быстро замедляется, передаточное число HMT должно быстро уменьшаться. Таким образом, нижний предел насыщения при замедлении транспортного средства должен быть больше, чем при ускорении транспортного средства. То есть пределы насыщения асимметричны. В этой статье предлагается стратегия инкрементального ПИД-регулирования скорости асимметричного насыщения HMT в диапазоне, и выводятся общие алгоритмы в каждом диапазоне.
3.1. Универсальный алгоритм инкрементного ПИД-регулятора
Контроллер HMT относится к цифровому блоку управления ПИД-регулятором, и его приращение где-то означает приращение при и означает ошибку при; ,, и — коэффициенты соответственно, где,,; относится к коэффициенту масштабирования и относится к интегральному коэффициенту; относится к производному коэффициенту,; означает производную постоянную времени, означает интегральную постоянную времени и означает период выборки.
Результат — где сумма).
3.2. Стратегия инкрементального ПИД-регулирования с асимметричным насыщением в диапазоне
Ошибка контроллера HMT находится где и — это частота вращения двигателя и идеальная частота вращения, соответственно.
Уравнение (2) можно было бы выразить следующим образом, если заменить и током насоса и приращением: где «» определяется рабочими диапазонами HMT. В диапазонах прямой пропорциональности, если передаточное число берется, знак плюс; в противном случае принимается знак минус. В диапазонах обратной пропорции, если передаточное число, берется знак минус; в противном случае используется знак плюса.В двухдиапазонном HMT диапазон H является прямо пропорциональным диапазоном. В положительной половине диапазона первая «±» в (4) принимает знак «плюс». А в отрицательной половине диапазона, вторая принимает знак минус. Диапазон HM — это диапазон обратной пропорции. Точно так же первый «±» в (4) принимает знак минус, а второй — знак плюс. относится к току накачки при. и — верхний и нижний пределы тока накачки. В двухдиапазонном HMT гидравлический насос с регулируемым рабочим объемом представляет собой аксиально-поршневой насос Sauer Danfoss серии 90, где и mA (предназначен для устранения нулевой мертвой зоны механизма управления рабочим объемом).и являются асимметричными насыщенными верхним и нижним пределами градиента управляющего тока, которые зависят от рабочего объема насоса / двигателя, передаточного отношения, сопротивления транспортного средства и так далее.
На рисунке 2 выходная скорость HMT является функцией скорости двигателя. И подходящие параметры PID, и в (5) для каждого диапазона должны быть выбраны с помощью большого количества моделирования и экспериментов, чтобы уменьшить колебания скорости двигателя. В результате теоретических расчетов и моделирования параметры ПИД-регулятора выглядят следующим образом:,, в диапазоне,,, в диапазоне HM, мА и мА.
4. Логика сдвига диапазона
Логика сдвига диапазона — это порядок диапазонов. Для реализации бесступенчатой трансмиссии элементы переключения диапазона HMT, такие как тормоза, должны управляться последовательно, и HMT может работать в последовательном диапазоне. Логика сдвига диапазона двухдиапазонного HMT показана в таблице 1.
| |||||||||||||||||||
5.Условия сдвига диапазона
Сдвиг диапазона относится к процессу перехода между двумя соседними диапазонами. Чтобы улучшить качество переключения, условия переключения следующие: (1) Конечная выходная скорость HMT в текущем диапазоне должна быть равна исходной точке целевого диапазона. В каждом диапазоне применяется управление с обратной связью для управления скоростью двигателя. Идеальное время переключения достигается в соответствии с частотой вращения двигателя и частотой вращения двигателя. Целевая скорость двигателя достигается в идеальной точке переключения, когда скорости ведущего и ведомого дисков целевого тормоза равны.В двухдиапазонном HMT вычисляется идеальная скорость от диапазона H до диапазона HM: где,, и — количество зубьев шестерен от входного вала до соответственно; ,, и являются характеристическими параметрами трех планетарных передач. (2) Отклонение частоты вращения двигателя (абсолютное значение) должно быть больше минимального установленного значения. Во избежание повторения переключения необходимо установить минимальное отклонение частоты вращения двигателя. Только тогда, когда отклонение частоты вращения двигателя больше, чем оно может быть разрешено, переключение диапазона разрешено. (3) Условие переключения на более высокую передачу должно быть выполнено.В зависимости от дорожной обстановки водитель выбирает больший диапазон с помощью переключателя диапазонов, чтобы ограничить скорость автомобиля. Только тогда, когда переключателем диапазона разрешено переключение на более высокую передачу, будет выполнено переключение на более высокий диапазон.
Подводя итог, условия переключения с диапазона H на диапазон HM равны
Условия переключения с диапазона HM на диапазон ниже, где находится установленное значение переключателя диапазонов. Если, выходная скорость HMT равна 0; если, HMT может работать только в диапазоне; и когда HMT может работать в диапазоне HM.- минимальное отклонение частоты вращения двигателя.
6. Стратегии переключения диапазона
В процессе переключения диапазона тормоз текущего диапазона отпускается, и включается тормоз целевого диапазона. Последовательность переключения тормоза определяется логикой сдвига диапазона, а время начала сдвига диапазона определяется условиями сдвига диапазона.
Направление вращения двигателя постоянно во время сдвига диапазона. Но изменение направления крутящего момента двигателя приводит к замене контуров высокого и низкого давления.Между тем, поток мощности в гидравлической системе меняется на противоположный. Скорость двигателя колеблется из-за резкого изменения давления и объемного КПД гидроагрегата. При этом резко меняются скоростные характеристики HMT и изменяются силовые характеристики, что приводит к появлению шума и вибрации.
Именно стратегии переключения диапазона отвечают за идеальное включение и выключение тормозов, чтобы уменьшить время переключения и ударные нагрузки, а также минимизировать колебания входной и выходной скорости [10].Стратегии сдвига диапазона относятся к параметрам управления и их управляющим сигналам, включая изменение, время начала и время остановки. Стратегии смены диапазона в этой работе включают следующее: (1) Время перекрытия между двумя тормозами. относится ко времени начала включения встречного тормоза и относится ко времени начала отпускания выходящего тормоза. Время перекрытия между тормозами равно (2) Масляный буфер во время отпускания тормоза. На него влияют время начала, время окончания, максимальная ширина импульса и изменение ширины импульса сигнала пропорционального предохранительного клапана.(3) Регулировка рабочего объема насоса. Он определяется временем начала, временем окончания и изменением тока смещения.
Указанные выше время начала и время окончания являются приращениями времени относительно времени начала сдвига диапазона.
Время и изменение управляющих переменных стратегий переключения диапазонов должны определяться посредством ряда моделирования и экспериментов и связаны со следующими факторами: (1) Схема механической трансмиссии. Из-за совпадения зубцов в конструкции механической трансмиссии фактическое передаточное число каждого диапазона не может быть равным идеальному передаточному отношению HMT, которое тесно связано с изменением тока смещения.(2) Характеристики отклика и объемный КПД замкнутого гидравлического контура. Изменение тока смещения может быть достигнуто только при сдвиге диапазона и может вызвать удар, если его синхронизация неверна. То есть ток смещения может изменяться после выключения отходящего тормоза. Его время начала больше нуля, а время окончания связано с характеристиками отклика замкнутого гидравлического контура. На изменение тока смещения влияет объемный КПД замкнутого гидравлического контура.(3) Параметры тормоза. На время перекрытия влияют диаметр гидроцилиндра и ход выходящего и встречного тормозов. На процесс изменения ширины импульса и максимальную длительность импульса пропорционального предохранительного клапана влияют коэффициент крутящего момента фрикционной пластины, жесткость и начальное смещение возвратной пружины в выходном тормозе. Диаметр и длина гидравлического контура управления тормозом также влияют на управляющие сигналы.
Хотя стратегии сдвига диапазона различаются для разных схем HMT, существует несколько универсальных правил, а именно: (1) В процессе переключения с диапазона H на диапазон HM изменение тока смещения является отрицательным, в то время как в процессе переключения с диапазона HM на более низкую передачу Диапазон H, положительный.(2),, и определяются временем запаздывания механизма управления гидронасосом переменной производительности и временем заполнения тормоза маслом. Если, то. Если, то и. Если, то и; немного меньше. (3) Минимальное давление масла для амортизации давления масла должно быть больше минимального давления масла для перемещения поршня тормоза.
Согласно результатам моделирования, стратегии сдвига диапазона из диапазона в диапазон HM следующие:,, и; мА; , как показано на рисунке 3. Управляющие сигналы от диапазона HM к диапазону такие же, как и при переключении на повышенную передачу по значению и времени, за исключением мА.
7. Моделирование стратегий управления
В соответствии со стратегиями управления модель контроллера построена в Matlab Simulink (рис. 4) и смоделирована с моделью транспортного средства, оснащенного двухдиапазонным HMT. Модель автомобиля построена на MSC Easy5 [16]. Результаты показаны на Рисунке 5.
Когда коэффициент сопротивления качению равен 0,02, открытие дроссельной заслонки показано на Рисунке 5 (a). Управляющие сигналы и скорости показаны на рисунках 5 (b), 5 (c) и 5 (d).
Перед открытием дроссельной заслонки двигателя (раньше) тормоз включается, а другой отключается. Двигатель находится в режиме холостого хода, HMT находится в нейтральном диапазоне, а автомобиль припаркован. При открытии дроссельной заслонки () сигнал управления начинает усиливаться, HMT переходит на диапазон, и автомобиль трогается с места.
В момент, условия сдвига диапазона HMT удовлетворяются от диапазона к диапазону HM, и контроллер начинает запускать стратегии сдвига диапазона (показанные на рисунке 3). Во время переключения диапазона () сигнал торможения уменьшается, а сигнал торможения постепенно увеличивается.Ток смещения уменьшается на 14 мА (), а частота вращения двигателя немного колеблется. После сдвига диапазона HMT переходит в диапазон HM. При уменьшении рабочего объема гидронасоса автомобиль ускоряется в отрицательной половине диапазона HM. Во время HMT проходит нулевую точку в положительную половину диапазона HM, в которой смещение равно нулю. В положительной половине диапазона HM, когда рабочий объем гидравлического насоса увеличивается в обратном направлении, автомобиль ускоряется.
При уменьшении дроссельной заслонки и уменьшении целевой скорости двигателя ток смещения увеличивается в обратном направлении, пока фактическая частота вращения двигателя не станет ниже ее целевой скорости.В момент времени скорость автомобиля начинает снижаться. В момент, когда дроссельная заслонка двигателя закрывается, целевая частота вращения двигателя изменяется, и ток смещения сильно изменяется. В момент, HMT возвращается к положительной половине диапазона HM, и автомобиль непрерывно замедляется. В момент, когда HMT входит в смещение диапазона от диапазона HM к диапазону H, управляющий сигнал тормоза постепенно уменьшается с увеличением управляющего сигнала торможения. Ток смещения увеличивается на 14 мА (), частота вращения двигателя также немного колеблется, и HMT переходит в диапазон H.В момент, HMT возвращается в нейтральный диапазон.
На Рисунке 5 управляющий ток гидравлического насоса не колеблется в пределах диапазона. Повторяющегося сдвига нет. Двигатель падает до холостого хода после того, как HMT возвращается в нейтральное положение.
Идеальная и фактическая частота вращения двигателя показаны на Рисунке 5 (c). Запуск ракеты-носителя занимает 1,2 с (от 5 до 6,2 с). После запуска транспортного средства, очевидно, больше, чем. От s, поскольку нагрузка на двигатель больше, быстро падает до немного выше.После этого держится около, а максимальная разница составляет 44 об / мин (за исключением нулевых точек гидронасоса и переключения диапазонов). падает до менее чем после закрытия дроссельной заслонки. быстро снижается до. Из-за инерции автомобиля фактическая частота вращения двигателя сохраняется в течение некоторого времени (около 10,1 с) с регулировкой HMT. Когда скорость автомобиля приблизительно равна нулю, двигатель быстро переходит на холостой ход.
Скорость автомобиля показана на Рисунке 5 (d). При трогании с места, ускорении, замедлении и остановке транспортного средства не происходит колебаний скорости во время переключения диапазонов или в нулевых точках.
8. Аппаратное обеспечение в моделировании контура
HILS HMT — это метод тестирования, основанный на системе компьютерного моделирования. В тесте HILS объект HMT заменяет модель HMT в схеме моделирования. И он напрямую управляется контроллером через устройства ввода / вывода и схему интерфейса.
Благодаря тому, что объект HMT подключен к схеме моделирования, этот тест может дополнительно подтвердить надежность результатов моделирования. Этот метод позволяет проверить правильность стратегии управления на основе компьютерного моделирования HMT и точно настроить параметры управления.Он также может проверить правильность имитационной модели HMT. Это особенно эффективно для использования модели серого ящика для описания HMT, которую трудно описать математической моделью.
На основе испытательного стенда динамического моделирования мощностью 330 кВт исходные объекты нагрузки приводят в движение и нагружают HMT в соответствии с динамическими характеристиками двигателя и транспортного средства посредством модели вождения в реальном времени. В этой системе HMT является материальным объектом, а все остальные части являются моделями или управляются моделями.Система HILS показана на рисунке 6. И некоторые объекты теста HILS показаны на рисунке 7.
Программное обеспечение HILS HMT состоит из модели контроллера HMT, модели двигателя, моделей транспортных средств в реальном времени, и целевые окна в реальном времени. Под управлением модели двигателя в реальном времени компонент нагрузки 2 испытательного стенда динамического моделирования, который работает в соответствии с характеристиками двигателя, обеспечивает питание HMT. Под управлением модели транспортного средства в реальном времени компонент нагрузки 1 загружает HMT в соответствии с характеристиками движения транспортного средства.Модель контроллера осуществляет управление HMT в реальном времени в соответствии со стратегиями управления. HMT регулирует передаточное число в соответствии с изменением условий работы транспортного средства, что позволяет двигателю работать примерно с оптимальной скоростью (наилучшая экономия топлива или наилучшая производительность).
Входными данными модели двигателя в реальном времени является крутящий момент нагрузки, а выходными данными — частота вращения двигателя. На испытательном стенде динамического моделирования компонент нагрузки 2, моделирующий двигатель, находится под управлением режима постоянной скорости.Детектор скорости и крутящего момента 2 передает крутящий момент нагрузки обратно на компьютер моделирования. Результат расчета модели двигателя в реальном времени передается компоненту нагрузки 2.
Модель двигателя в реальном времени может быть описана следующим образом: где — инерция смоделированного двигателя, — статический выходной крутящий момент смоделированного двигателя, — крутящий момент нагрузки по обратной связи. датчика крутящего момента, является выходной скоростью компонента нагрузки 2, является управляющим напряжением контроллера компонента нагрузки 2, и является коэффициентом линейного преобразования управляющего напряжения компонента нагрузки 2.
В компьютерной имитационной модели входными и выходными данными модели транспортного средства являются выходная скорость и крутящий момент нагрузки HMT, соответственно. На испытательном стенде динамического моделирования компонент нагрузки 1, моделирующий транспортное средство, находится под управлением режима постоянного крутящего момента. Чтобы обеспечить соответствие входных и выходных данных расчетам в имитационной модели, необходимо ввести «виртуальную ось» в модель транспортного средства в реальном времени.
Выходной крутящий момент модели транспортного средства в реальном времени: где — жесткость на кручение виртуальной оси, — это демпфирование виртуальной оси, — это выходной крутящий момент модели транспортного средства в реальном времени, — это сигнал скорости обратной связи датчика скорости, — угловая скорость эквивалентной инерции транспортного средства, — управляющее напряжение контроллера компонента нагрузки 1, и — коэффициент линейного преобразования управляющего напряжения компонента нагрузки 1.
Под нагрузкой компонент 1, работающий без нагрузки в ручном режиме управления, результаты теста сдвига диапазона HMT показаны на рисунке 8. Рисунки показывают, что процесс переключения диапазона плавный и колебаний скорости не происходит. Это показывает, что стратегия управления сдвигом диапазона, определяемым скоростью двигателя, является разумной. Когда нагрузка увеличивается, выходная скорость явно колеблется в процессе сдвига диапазона. В нем говорится, что стратегии управления сдвигом диапазона необходимы.
Когда компоненты нагрузки 1 и 2 управляются автоматически, кривая дроссельной заслонки двигателя показана на рисунке 9 (a), а отклики HMT показаны на рисунке 9 (b).Основные показатели эффективности показаны на рисунках 9 (c) и 9 (d). Как показано на рисунке 9, при изменении дроссельной заслонки двигателя передаточное отношение HMT изменяется под управлением модели контроллера. На стадии стабилизации дроссельной заслонки частота вращения двигателя регулируется до близкой к оптимальной, а правила ее изменения соответствуют результатам моделирования. Благодаря регулировке мощности двигателя и инерции автомобиля двигатель может работать на максимальной скорости в течение длительного времени.
9. Выводы
(1) Предлагается интегрированная стратегия управления HMT.Получен алгоритм стратегии асимметричного насыщенного инкрементального ПИД-регулирования скорости в условиях диапазона и сдвига диапазона. В этой статье представлена логика переключения диапазонов и стратегии управления переключением диапазонов. (2) Модель контроллера построена в Matlab Simulink и смоделирована с моделью транспортного средства, оснащенного двухдиапазонным HMT. Результаты моделирования показывают, что под управлением предложенных стратегий двигатель работает со скоростью, близкой к идеальной, и транспортное средство соответствует требованиям вождения с изменением дроссельной заслонки.(3) Выполняется HILS-тест HMT. Результаты испытаний показывают, что процесс переключения диапазона плавный и колебаний скорости не происходит. На стадии стабилизации дроссельной заслонки частота вращения двигателя регулируется до близкой к оптимальной скорости, а правила ее изменения соответствуют результатам моделирования. (4) Результаты демонстрируют, что модель HMT верна, а стратегия управления разумна. Система HILS работает надежно и соответствует требованиям исследования динамических характеристик HMT.
Конфликт интересов
Авторы заявляют об отсутствии конфликта интересов в отношении публикации данной статьи.
Благодарности
Эта работа поддержана Национальным фондом естественных наук Китая (грант № 51175449) и Программой научных исследований высшего образования провинции Хэбэй (грант № Z2015081).
Гидромеханические трансмиссии и гибридные системы движения
В современном обществе энергоэффективность и бережное отношение к окружающей среде важны как никогда. Это также относится к тяжелой строительной технике, такой как колесные погрузчики и самосвалы.В свою очередь, в этих машинах используется гидравлика для передачи больших потоков энергии на двигательные и рабочие функции, что подчеркивает важность гидравлических систем с высокой энергоэффективностью в этих машинах. Поэтому в RHYTHM мы изучаем, как можно улучшить эти гидравлические системы. Мы ориентируемся на гибридные концепции, в которых гидроаккумуляторы включены в систему. Гидравлический аккумулятор содержит газ, который действует как пружина, накапливая энергию, например, во время торможения, и впоследствии рекуперируя ее.Этот метод снижает потребление энергии.
Гибридные гидравлические системы
демонстрируют большой потенциал для тяжелой строительной техники, но имеются ограниченные знания о том, как следует собирать системы и управлять ими для максимальной экономии энергии. Поэтому компьютерные инструменты, такие как моделирование и оптимизация, важны для экономии времени и других ресурсов. В RHYTHM мы используем особый тип моделирования, называемый «аппаратное обеспечение в цикле». Эта концепция означает, что физические компоненты включаются в моделирование в реальном времени.Таким образом, некоторые части моделирования представляют реальность, в то время как другие части могут быть включены в качестве моделей, которые можно легко модифицировать, если необходимо протестировать различные системы.
Центральные вопросы в проекте:
- Как можно использовать моделирование аппаратных средств для проверки концепции системы?
- Как следует заполнять и опорожнять гидроаккумулятор, чтобы добиться максимальной энергоэффективности?
- Как следует управлять гибридной системой для достижения желаемой функциональности?
- Сколько можно получить, если гидравлическая система трансмиссии соединена с рабочей гидравлической системой вместе с гидроаккумулятором?
Пример моделирования HardWare-In-The-Loop колесного погрузчика с гибридной гидравлической системой
Патент США на модульную конструкцию для гидромеханической трансмиссии Патент (Патент №10,948,063, выданный 16 марта 2021 г.)
ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение в целом относится к бесступенчатым трансмиссиям и, в частности, к модульной зубчатой передаче для соединения шестерен в гидромеханической трансмиссии.
Предпосылки
Бесступенчатая трансмиссия (CVT) может относиться к автоматической трансмиссии, которая может плавно переключаться в непрерывном диапазоне эффективных передаточных чисел, в отличие от других механических трансмиссий, которые предлагают фиксированное количество передаточных чисел. Позволяя двигателю работать на наиболее эффективных оборотах двигателя для диапазона выходных скоростей, нагрузок двигателя и / или тому подобного, вариатор обеспечивает лучшую производительность и топливную экономичность. Например, когда мощность важнее, чем экономия, передаточное число вариатора можно изменить, чтобы двигатель мог вращаться с частотой вращения в минуту (RPM), при которой двигатель выдает большую мощность, которая обычно выше, чем скорость вращения. достигает максимальной эффективности.Существующие вариаторы обычно проектируются как большие и длинные конструкции, чтобы соответствовать требованиям к использованию и падению машины, и обычно не могут быть экономически интегрированы в более мелкие приложения. Таким образом, такие передачи обычно используются только в ограниченных небольших приложениях.
Одна попытка создать более компактный вариатор раскрыта в патенте США No. № 9 488 263, выданный Васудеве 8 ноября 2016 г. («патент 263»). В частности, патент ‘263 раскрывает вариатор, использующий первый и второй тракты источника питания для обеспечения нескольких выходных сигналов через планетарную шестерню и конечный выходной элемент.Некоторые реализации конструкции гидромеханического вариатора, раскрытые в патенте ‘263, имеют первый модуль дифференциала и второй модуль диапазона, каждый из которых имеет планетарные зубчатые передачи, компактно установленные последовательно с выходной раздаточной шестерней третьего модуля коробки передач для выборочного связывания выходной вал трансмиссии к выходам планетарных зубчатых передач.
В то время как вариатор по патенту ‘263 может иметь более компактную упаковку и может позволять упаковывать вариатор в меньшие машины или места с ограниченным пространством, вариатор по патенту’ 263 может быть недостаточно компактным для даже меньших машин или более жесткие ограничения по пространству.CVT настоящего раскрытия решает одну или несколько проблем, изложенных выше, и / или другие проблемы в данной области техники.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В некоторых реализациях настоящее раскрытие относится к трансмиссии для соединения с первичным приводом через первый тракт источника энергии, который включает в себя вариатор, и второй тракт источника энергии, который включает в себя по меньшей мере одну механическую шестерню. Трансмиссия может включать в себя дифференциальный модуль, который включает в себя первую планетарную шестерню, имеющую первое множество шестерен, включая солнечную шестерню и водило, где первый путь источника энергии должен обеспечивать мощность солнечной шестерни, а второй путь источника энергии должен обеспечивают питание несущей, и где мощность от первого пути источника питания и мощность от второго пути источника питания должны подаваться через один и тот же конец дифференциального модуля.Трансмиссия может включать в себя модуль диапазона, который включает в себя вторую планетарную шестерню, имеющую второе множество шестерен. Трансмиссия может включать в себя множество селективно включаемых узлов сцепления, которые могут выборочно включаться для обеспечения множества диапазонов направленности, где по меньшей мере один узел сцепления из множества выборочно включаемых узлов сцепления может выборочно сцепляться для соединения по меньшей мере одной шестерни с первая планетарная шестерня, по меньшей мере, с одной шестерней из второй планетарной передачи.Коробка передач может включать в себя модуль отводной коробки, который включает в себя конечный выходной элемент, где дифференциальный модуль может быть соединен с модулем диапазона для обеспечения переменной мощности вращения для модуля диапазона, где модуль диапазона может быть соединен с модулем отводной коробки для направления переменная мощность вращения в выбранном направлении, и где переменная мощность вращения, обеспечиваемая в выбранном направлении, должна передаваться через модуль отводной коробки к конечному выходному элементу.
В некоторых реализациях настоящее раскрытие относится к трансмиссии, которая включает в себя дифференциальный модуль, модуль диапазона, первый тракт источника питания, который включает в себя вариатор, второй тракт источника питания, который включает в себя по меньшей мере одну механическую шестерню, множество агрегаты сцепления и модуль коробки передач.Модуль дифференциала может включать в себя первую планетарную шестерню, которая включает в себя первую солнечную шестерню, вторую солнечную шестерню, первый набор планетарных шестерен, второй набор планетарных шестерен, первое водило планетарной передачи и первую кольцевую шестерню. Модуль диапазона может включать в себя вторую планетарную шестерню, которая включает в себя третью солнечную шестерню, четвертую солнечную шестерню, третий набор планетарных шестерен, четвертый набор планетарных шестерен, второе водило планетарной передачи и вторую коронную шестерню. Первый тракт источника питания и второй тракт источника питания могут обеспечивать питание дифференциального модуля, не проходя через модуль диапазона.Множество узлов сцепления может включать в себя, по меньшей мере, первый узел сцепления и второй узел сцепления, причем первый узел сцепления может выборочно сцепляться для соединения, по меньшей мере, одной шестерни первой планетарной зубчатой передачи и, по меньшей мере, одной шестерни второй планетарной зубчатой передачи. и где второй узел сцепления может выборочно сцепляться для соединения по меньшей мере с одной шестерней второго планетарного зубчатого колеса. Модуль отводной коробки может включать в себя конечный выходной элемент, где дифференциальный модуль может быть соединен с модулем диапазона, чтобы обеспечить переменную мощность вращения для модуля диапазона, где модуль диапазона может быть соединен с модулем отводной коробки, чтобы направлять переменную мощность вращения в выбранный диапазон, и где переменная мощность вращения в выбранном диапазоне должна передаваться через модуль dropbox на конечный выходной элемент.
В некоторых реализациях настоящее раскрытие относится к машине, которая включает в себя трансмиссию. Машина может включать в себя первый тракт источника энергии, который включает вариатор, и второй тракт источника энергии, который включает, по меньшей мере, одну механическую шестерню. Машина может включать в себя дифференциальный модуль, который включает в себя первую планетарную шестерню, имеющую первое множество шестерен, включая солнечную шестерню и водило, где первый путь источника энергии должен обеспечивать мощность солнечной шестерни, а второй путь источника энергии должен подавать питание на водило, при этом мощность на солнечную шестерню и мощность на водило должны подаваться с одного и того же направления относительно модуля дифференциала.Машина может включать в себя модуль диапазона, который включает в себя вторую планетарную шестерню, имеющую второе множество шестерен. Машина может включать в себя множество селективно зацепляемых узлов сцепления, которые могут выборочно зацепляться для обеспечения множества диапазонов направленности, где, по меньшей мере, первый узел сцепления из множества избирательно зацепляемых узлов сцепления может выборочно сцепляться для соединения по меньшей мере одной шестерни с первая планетарная зубчатая передача, по меньшей мере, с одной шестерней из второй планетарной зубчатой передачи, и где, по меньшей мере, второй узел сцепления из множества избирательно включаемых узлов сцепления может выборочно сцепляться для соединения по меньшей мере с одной шестерней второй планетарной передачи договоренность.Машина может включать в себя модуль отводной коробки, который включает в себя конечный выходной элемент, где дифференциальный модуль может быть соединен с модулем диапазона, чтобы обеспечить переменную мощность вращения для модуля диапазона, где модуль диапазона может быть соединен с модулем отводной коробки, чтобы направлять переменная мощность вращения в выбранном направлении, и где переменная мощность вращения, обеспечиваемая в выбранном направлении, должна передаваться через модуль отводной коробки к конечному выходному элементу.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
ФИГ.1-3 иллюстрируют схематические изображения примеров бесступенчатых трансмиссий.
ПОДРОБНОЕ ОПИСАНИЕ
Это раскрытие относится к вариатору. Вариатор универсален и применим к любой машине, использующей такой вариатор. Термин «машина» может относиться к любой машине, которая выполняет операции, связанные с отраслью, такой как, например, горнодобывающая промышленность, строительство, сельское хозяйство, транспорт или любая другая отрасль. В качестве некоторых примеров машина может представлять собой транспортное средство, экскаватор-погрузчик, рубанок холодного типа, колесный погрузчик, уплотнитель, валочно-пакетирующую машину, лесозаготовительную машину, форвардер, харвестер, экскаватор, промышленный погрузчик, погрузчик с поворотной стрелой. , погрузчик-погрузчик, автогрейдер, трубоукладчик, дорожный регенератор, погрузчик с бортовым поворотом, трелевочный трактор, телескопический погрузчик, трактор, бульдозер, скрепер трактора или другое оборудование для дорожных работ или подземных горных работ.Кроме того, к машине могут быть подсоединены один или несколько агрегатов и приводиться в движение от вариатора.
РИС. 1 иллюстрирует схематический вид примерной бесступенчатой трансмиссии (CVT) 10 , включающей аспекты настоящего раскрытия. Хотя здесь описывается конкретная реализация вариатора 10 , вариатор 10 может быть любого типа, имеющего соответствующие компоненты для выполнения описанных здесь методов.
В некоторых реализациях CVT 10, может включать в себя множество модулей, которые могут быть соединены вместе в различных конфигурациях вывода для применения во множестве машинных приложений.Для облегчения понимания соответствующие модули показаны пунктирными линиями. Первый, дифференциальный модуль , 12, может включать в себя, по меньшей мере, одну первую планетарную шестерню , 14, с множеством шестерен. Второй модуль 20, диапазона может включать в себя вторую планетарную шестерню , 22, с множеством шестерен. Дифференциальный модуль , 12, может определять снижение крутящего момента / скорости из входа, который объединяет первый путь источника питания , 16, и второй путь источника питания , 18, , а модуль диапазона 20, может определять направление передаваемого движения. по вариатору 10 (эл.g., работает ли вариатор 10 в прямом, обратном или вспомогательном режиме). Третий модуль , 30, с раздвижной коробкой может включать в себя выходное зубчатое колесо , 32, и может адаптировать выход дифференциального модуля , 12, и модуля диапазона 20 к конечному выходному элементу 126 для конкретных конфигураций машины. .
Изображенный вариатор 10 может включать в себя гидромеханическую трансмиссию 40 , которая может приводиться в движение основным приводом 41 , таким как двигатель 42 .Двигатель , 42, может включать в себя, например, двигатель внутреннего сгорания или другое устройство, способное приводить в действие вариатор 10 . Двигатель 42, может обеспечивать выход как на гидростатическую трансмиссию , 44, , так и на механическую трансмиссию 46 через входной элемент 48 . Входной элемент , 48, может обеспечивать разделенную мощность на гидростатическую трансмиссию , 44, (например, через входную шестерню 50 и входную шестерню гидростатической трансмиссии 60 ) и первую планетарную шестерню 14 механической трансмиссии. 46 (эл.g., через входную шестерню 50 и входную шестерню механической коробки передач 52 ). В некоторых реализациях входная шестерня , 50, может быть прикреплена (например, к входному элементу 48, ). Используемый здесь термин «фиксированный» может означать, что он выполнен за одно целое, постоянно прикреплен, закреплен штифтом, соединен между собой посредством шлицевого соединения или сплавлен, например, сваркой или любыми другими способами, известными специалистам в данной области техники.
Гидростатическая трансмиссия 44 может включать вариатор 54 , который включает в себя насос с регулируемым рабочим объемом 56 и двигатель 58 , который приводится в действие насосом с регулируемым рабочим объемом 56 .Насос с регулируемым рабочим объемом , 56, может быть связан с приводом от двигателя 42 через входную шестерню 60 гидростатической трансмиссии, зацепленную с входной шестерней 50 . Двигатель , 58, может быть двигателем переменного рабочего объема или двигателем постоянного рабочего объема. Двигатель , 58, может обеспечивать выход на первую планетарную шестерню , 14, . Например, такой выходной сигнал может подаваться от двигателя , 58, на выходную шестерню 62 гидростатической трансмиссии, которая может быть зацеплена с планетарным входным элементом 64 .Выходной сигнал может передаваться от планетарного входного элемента , 64, к первому планетарному редуктору , 14, через первый соединительный элемент , 66, . Первый соединительный элемент , 66, может включать в себя один или несколько валов и / или шестерен.
Таким образом, насос с регулируемым рабочим объемом 56 может использовать разделенную входную мощность от двигателя 42 для гидравлического привода двигателя 58 , чтобы преобразовать входную мощность от двигателя 42 в гидростатическую выходную мощность по непрерывному передаточное отношение.В этом случае мощность может подаваться от двигателя , 42, на первую планетарную шестерню , 14, по первому пути , 16, источника энергии, который включает в себя вариатор , 54, . В некоторых реализациях первый тракт , 16, источника энергии может включать в себя входной элемент 48 , входную шестерню 50 , входную шестерню гидростатической трансмиссии 60 , вариатор 54 , выходную шестерню гидростатической трансмиссии 62 , планетарный входной элемент 64 и / или первый соединительный элемент 66 .
Мощность также может подаваться от двигателя 42 к первому планетарному редуктору 14 по второму пути 18 источника энергии, который не включает вариатор 54 . В некоторых реализациях второй тракт , 18, источника питания может быть трактом механического источника энергии и / или может включать в себя входной элемент 48 , входную шестерню 50 , входную шестерню 52 механической трансмиссии и / или второй соединительный элемент 68 .Второй соединительный элемент , 68, может включать в себя один или несколько валов и / или шестерен. Например, входная шестерня 52 механической трансмиссии может быть соединена с входной шестерней 50 , которая может быть соединена и / или прикреплена к входному элементу 48 . Входная шестерня , 52, механической трансмиссии может входить в зацепление с соединительным элементом , 68, , который может обеспечивать вход в первую планетарную шестерню , 14, . Хотя были проиллюстрированы конкретные пути , 16, , , 18, , первый и второй источники питания, первые и вторые пути , 16, , 18 источника питания могут отличаться от показанных, и могут зависеть от машины, которая включает Вариатор 10 .
В некоторых реализациях первая планетарная шестерня , 14, может быть планетарной передачей Равиньо. Например, первая планетарная шестерня 14 может включать в себя две солнечные шестерни 70 , 72 , водило 74 , которое удерживает первую и вторую планетарные шестерни 76 , 78 (например, набор внутренних планет и набор внешних планет) и зубчатый венец 80 . Первый планетарный редуктор , 14, может комбинировать гидростатическую выходную мощность от первого тракта , 16, источника энергии с разделенной входной механической мощностью от второго тракта источника питания 18 для подачи гидромеханической выходной мощности на модуль диапазона 20 .В некоторых реализациях первая планетарная зубчатая передача , 14, обеспечивает конфигурируемый выбор планетарных выходов для обеспечения желаемой скорости модулю 20, диапазона.
Точно так же вторая планетарная шестерня , 22, может быть планетарной передачей Равиньо. Например, вторая планетарная шестерня 22 может включать в себя две солнечные шестерни 90 , 92 , водило 94 , которое удерживает первую и вторую планетарные передачи 96 , 98 (например.г., набор внутренних планет и набор внешних планет), и зубчатый венец 100 . Хотя первая и вторая планетарные шестерни , 14, , , 22, показаны в конкретной конфигурации, возможны и другие конфигурации.
Как показано, первый тракт , 16, источника питания и второй тракт , 18, источника питания могут входить в дифференциальный модуль , 12, с одного и того же конца (то есть с одной стороны). Например, как показано, первый тракт , 16, источника питания и второй тракт источника питания могут обеспечивать питание дифференциального модуля , 12, (e.g., через первый соединительный элемент , 66, и второй соединительный элемент , 68, соответственно) от конца дифференциального модуля , 12, , ближайшего к двигателю , 42, . Таким образом, первому соединительному элементу , 66, и второму соединительному элементу , 68, не нужно обходить коронную шестерню , 80, , чтобы обеспечить питание первой планетарной зубчатой передачи 14 .
Другими словами, первый тракт , 16, источника питания и второй тракт , 18, источника питания могут обеспечивать питание дифференциального модуля 12 (например.g., к солнечной шестерне 70 и водилу 74 планетарной передачи соответственно) с одного и того же направления относительно модуля дифференциала 12 . В этом случае первый соединительный элемент , 66, и второй соединительный элемент , 68, могут входить в дифференциальный модуль , 12, с одного и того же направления. Дополнительно или альтернативно, первый тракт , 16, источника питания и второй тракт , 18, источника питания могут обеспечивать питание дифференциального модуля , 12, , не проходя через модуль диапазона 20, .Таким образом, первый соединительный элемент , 66, и второй соединительный элемент , 68, не обязательно должны проходить через модуль диапазона 20 для подачи питания на дифференциальный модуль 12 .
В некоторых реализациях переменная мощность вращения, передаваемая от дифференциального модуля 12 к модулю диапазона 20 , может быть обеспечена вдоль нескольких валов или нескольких направлений от дифференциального модуля 12 к модулю диапазона 20 ( е.g., к солнечной шестерне 92 второй планетарной передачи 22 ). Например, переменная мощность вращения может выводиться из модуля 12, дифференциала через выходной элемент 114 модуля дифференциала и может передаваться через одну или несколько шестерен раздаточной коробки , 116, , соединенной с выходом модуля дифференциала. член 114 . Переменная мощность вращения может передаваться от раздаточной шестерни , 116, к входному элементу , 118, модуля диапазона, связанному с одной или более шестерней раздаточной шестерни , 116, .Входной элемент , 118, модуля диапазона может быть соединен с одной или несколькими шестернями второго планетарного механизма 22 , например солнечной шестерней , 92, . Выходной элемент , 114, дифференциального модуля, раздаточная шестерня , 116, и / или входной элемент , 118, модуля диапазона могут включать в себя один или несколько валов, одну или несколько шестерен и / или тому подобное. В некоторых реализациях выходной элемент , 114, дифференциального модуля и входной элемент , 118, модуля диапазона могут быть параллельны друг другу, как показано.
CVT 10 может включать в себя множество селективно включаемых узлов сцепления 102 , 104 , 106 , 108 , 110 . Используемый здесь термин «выборочное включение» означает, что узел сцепления может быть включен или выключен в зависимости от выбранного режима работы. По меньшей мере, один из узлов сцепления расположен для выборочного зацепления, по меньшей мере, одной шестерни первого планетарного редуктора , 14, , по меньшей мере, с одной шестерней второго планетарного редуктора , 22, .По меньшей мере, еще один из узлов сцепления может избирательно взаимодействовать по меньшей мере с одной шестерней второго планетарного механизма 22, .
В некоторых реализациях узлы сцепления , 102, , , 104, , , 106, могут включать в себя соответствующие вращающиеся диски, которые могут выборочно соединяться с другими установленными с возможностью вращения дисками для передачи мощности от одного вращающегося элемента к другому. В отличие от этого, узлы сцепления , 108, , , 110, могут включать в себя соответствующие вращающиеся диски, которые могут выборочно соединяться с неподвижным элементом , 112, , таким как корпус.Соответственно, узлы сцепления 108 , 110 могут называться стационарными узлами сцепления, также известными как тормоза, которые удерживают скорость сцепленной шестерни (коронной шестерни 100 и водила планетарной передачи 94 соответственно) до нуля. , тем самым влияя на скорость и / или направление выхода второй планетарной зубчатой передачи 22, .
В некоторых реализациях, по меньшей мере, один узел , 102, и / или 104 первого сцепления может быть выборочно задействован для соединения первого планетарного редуктора 14 со вторым планетарным редуктором 22 .Таким образом, зацепление, по меньшей мере, одной шестерни первого планетарного механизма , 14, , по меньшей мере, одной шестерни второго планетарного механизма , 22, определяет снижение крутящего момента / скорости от входа, который объединяет первый и второй источники энергии. пути 16 , 18 . В этой реализации зацепление узла сцепления , 102, обеспечивает низкий диапазон передач, а зацепление узла сцепления , 104, обеспечивает высокий диапазон передач.
Аналогичным образом, по меньшей мере, один второй узел сцепления 108 и / или 110 может выборочно включаться для соединения со вторым планетарным редуктором 22 для определения направления выходной мощности от модуля диапазона 20 к модуль капельного ящика 30 . В проиллюстрированной реализации узлы сцепления , 108, , , 110, являются неподвижными сцеплениями или тормозами. В этой реализации зацепление узла 108, сцепления обеспечивает диапазон передних передач, в то время как зацепление узла , 110, сцепления обеспечивает диапазон передач заднего хода.И наоборот, второй узел , 106, сцепления может выборочно включаться для соединения соответствующих шестерен второго планетарного механизма , 22, с первым планетарным редуктором , 14, . В проиллюстрированной реализации такое включение узла сцепления , 106, обеспечивает дополнительный диапазон передач. Аналогичным образом, в соответствии с этим раскрытием, включение различных узлов сцепления вариатора 10, может быть адаптировано для обеспечения множества диапазонов.
Хотя узлы сцепления показаны в конкретной конфигурации, возможны и другие конфигурации, включая большее или меньшее количество сцеплений, другое расположение и соединение с разными передачами, при условии, что узлы сцепления могут быть включены и / или отключен, чтобы обеспечить выбор диапазонов. Более того, один или несколько узлов сцепления 102 , 104 , 106 , 108 , 110 могут быть частью модуля диапазона 20 или дифференциального модуля 12 .Например, узлы сцепления , 102, , , 104, могут быть упакованы с первой планетарной зубчатой передачей 14 , узлы сцепления , 106, , , 110, могут быть упакованы со второй планетарной зубчатой передачей, , 22, , и узлом сцепления. 108 могут быть расположены отдельно от остальных узлов сцепления 102 , 104 , 106 , 110 .
В некоторых реализациях узлы сцепления 102 , 104 , 106 , 108 , 110 могут выборочно включаться или отключаться для обеспечения желаемого диапазона выходному элементу 120 второй планетарной передачи. Передаточный механизм 22 к модулю капельного ящика 30 .В этой конфигурации выходной элемент , 120, может быть соединен для вращения с водилом , 94, планетарной передачи, хотя выходной элемент , 120, может быть соединен иначе в других конфигурациях. Модуль , 30, отводной коробки может включать в себя выходную зубчатую передачу , 32, , которая может быть спроектирована для адаптации выходной мощности, обеспечиваемой выходным элементом , 120, , к конкретному применению. В проиллюстрированной реализации выходной элемент , 120, обеспечивает вращение первой выходной шестерне 122 , сцепленной с последней выходной шестерней , 124, , чтобы обеспечить вращение конечному выходному элементу 126 (например.g., к оси машины, навесного оборудования машины и / или тому подобное). Однако в качестве альтернативы модуль , 30, выпадающего ящика может быть спроектирован для облегчения адаптации выходного сигнала модуля 20, диапазона для конкретных приложений. Например, может быть предусмотрено меньшее количество или дополнительные конструкции, и / или размеры, конфигурации, передаточные числа и / или количество выходных шестерен могут быть изменены.
В проиллюстрированной реализации входной элемент 48 , первый соединительный элемент 66 и второй соединительный элемент 68 расположены параллельно планетарным зубчатым колесам 14 , 22 , выходной элемент 120 , а конечный выходной элемент 126 .Один или несколько из этих компонентов, а также другие компоненты могут поддерживаться внутри корпуса трансмиссии и могут вращаться вокруг подшипников, удерживаемых внутри корпуса.
В то время как модуль отводной коробки 30 показан в конкретной конфигурации, положения, зацепления и компоненты модуля отводной коробки 30 , а также положение и расположение конечного выходного элемента , 126, и машина, может отличаться от показанной на иллюстрации, и может зависеть от машины, в которую включен вариатор.
В некоторых реализациях вариатор 10 может включать в себя один или несколько приводов вспомогательных насосов , 130, и / или 132 . Например, вариатор 10 может включать в себя привод вспомогательного насоса , 130, , соединенный с вариатором 54 (например, насос с регулируемым рабочим объемом 56 вариатора 54 ). Дополнительно или альтернативно, вариатор 10 может включать в себя привод вспомогательного насоса , 132, , соединенный с входным элементом 48, .Дополнительно или альтернативно, вариатор 10 может включать в себя стояночный тормоз , 134, (например, привод вспомогательного насоса с приводом от земли), соединенный с конечным выходным элементом , 126, . Приводы вспомогательных насосов , 130, и / или 132, могут включать в себя любой тип насоса, такой как продувочный насос, смазочный насос, регулирующий насос, нагнетательный насос, насос рулевого управления, приводной насос (например, все насос привода колеса) и / или тому подобное. В некоторых реализациях вариатор 10, может быть включен в машину, такую как автогрейдер, колесный погрузчик и / или тому подобное.
Как указано выше, ФИГ. 1 приведен в качестве примера. Возможны и другие примеры, которые могут отличаться от описанных со ссылкой на фиг. 1. Например, вариатор 10 может включать в себя дополнительные компоненты, меньшее количество компонентов, другие компоненты или компоненты, расположенные иначе, чем те, которые показаны на фиг. 1.
РИС. 2 иллюстрирует схематический вид другого примера CVT 10 , включающего аспекты настоящего раскрытия.
Как показано на фиг.2, в некоторых реализациях вариатор 10 может включать в себя вспомогательный привод насоса , 136, , соединенный со вторым трактом источника питания 18 (например, ведущая шестерня 50 , ведущая шестерня 52 механической трансмиссии и /или т.п). Привод , 136, вспомогательного насоса может включать в себя любой тип насоса, такой как продувочный насос, смазочный насос, регулирующий насос, нагнетательный насос, насос рулевого управления, приводной насос (например, насос полного привода), и / или тому подобное.
Как показано на фиг. 2, в некоторых реализациях переменная мощность вращения, передаваемая от дифференциального модуля 12 к модулю диапазона 20 , должна подаваться вдоль одного вала или в одном направлении от дифференциального модуля 12 к модулю диапазона. 20 (например, на солнечную шестерню 92 ). Например, выходной элемент , 114, модуля дифференциала и входной элемент , 118 модуля диапазона по фиг.1 может быть единственным входным / выходным элементом , 138, , соединенным с выходом из первой планетарной зубчатой передачи , 14, и входом во вторую планетарную зубчатую передачу 22 . В этом случае элемент , 138, ввода / вывода может выполнять функции как выходного элемента , 114, дифференциального модуля, так и входного элемента , 118, модуля диапазона. В этой конфигурации модуль диапазона 20, может быть расположен на противоположном конце дифференциального модуля , 12, от конца, через который питание подается на дифференциальный модуль 12 через первый путь источника питания 16 и второй путь источника питания 18, , тогда как в устройстве, показанном на фиг.1, модуль диапазона 20, не расположен на противоположном конце дифференциального модуля , 12, от конца, через который питание подается на дифференциальный модуль , 12, .
В некоторых реализациях переменная мощность вращения может быть предоставлена модулю диапазона 20 (например, солнечной шестерне 92 второго планетарного механизма 22 ) после обхода коронной шестерни 100 второго планетарный редуктор 22 , как показано на фиг.2, в отличие от конфигурации, показанной на фиг. 3 и описано ниже. В этой конфигурации входной / выходной элемент , 138, может обходить коронную шестерню , 100, и / или одну или несколько других шестерен второго планетарного механизма 22 (например, солнечную шестерню , 90, , водило планетарной передачи 94 , первая планетарная шестерня 96 , вторая планетарная шестерня 98 и / или тому подобное) перед соединением с солнечной шестерней 92 .
Как указано выше, ФИГ. 2 приведен в качестве примера. Возможны и другие примеры, которые могут отличаться от описанных со ссылкой на фиг. 2. Например, вариатор 10 на фиг. 2 может включать в себя стояночный тормоз , 134, и / или другие компоненты, показанные на фиг. 1 и / или фиг. 3.
РИС. 3 иллюстрирует схематический вид другого примера CVT 10 , включающего аспекты настоящего раскрытия.
Как показано на фиг. 3, в некоторых реализациях переменная мощность вращения может быть предоставлена модулю диапазона 20, (например.g., солнечная шестерня 92 второй планетарной передачи 22 ) без обхода коронной шестерни 100 второй планетарной передачи 22 . В этой конфигурации входной / выходной элемент 138 может соединяться с солнечной шестерней 92 без обхода коронной шестерни 100 и / или одной или нескольких других шестерен второй планетарной шестерни 22 (например, солнечная шестерня , 90, , водило 94 , первая планетарная шестерня 96 , вторая планетарная шестерня , 98, и / или тому подобное).
Как указано выше, ФИГ. 3 приведен в качестве примера. Возможны и другие примеры, которые могут отличаться от описанных со ссылкой на фиг. 3. Например, вариатор 10 на фиг. 3 может включать в себя стояночный тормоз , 134, и / или другие компоненты, показанные на фиг. 2 и / или фиг. 3.
ПРОМЫШЛЕННАЯ ПРИМЕНИМОСТЬ
Во время работы вариатора 10 мощность может передаваться от первичного привода 41 к первому планетарному редуктору 14 дифференциального модуля 12 через первую и вторую мощность исходные пути 16 , 18 .Более конкретно, вращение входного элемента , 48, может обеспечивать мощность через входную шестерню 50 и входную шестерню 60 гидростатической трансмиссии в вариатор , 54, . Вариатор , 54, может подавать мощность через выходную шестерню 62 гидростатической трансмиссии на планетарный входной элемент 64 , который может быть жестко соединен с первым соединительным элементом , 66, , который может быть соединен с солнечной шестерней 70 первой планетарной передачи 14 .Вращение входного элемента 48 первичным приводом 41 может обеспечивать питание через входную шестерню 50 на входную шестерню 52 механической трансмиссии, которая может быть жестко соединена со вторым соединительным элементом 68 , который может быть соединен с водилом 74 первой планетарной шестерни 14 .
Мощность от модуля дифференциала 12 может передаваться на второй планетарный редуктор 22 модуля диапазона 20 на основе выборочного включения или выключения узлов сцепления 102 , 104 , 106 , 108 , 110 для обеспечения различных диапазонов.Более конкретно, в проиллюстрированной реализации, узлы сцепления 102 , 104 , 106 , 108 , 110 могут выборочно включаться и отключаться для обеспечения дальности низко-вперед, высоко-вперед, низко-реверсивный диапазон, высокий-реверсивный диапазон и вспомогательный диапазон. В этой реализации зацепление узла сцепления , 102, обеспечивает работу в низком диапазоне, а зацепление узла сцепления , 104, обеспечивает работу в верхнем диапазоне.Работа в низком и высоком диапазоне может быть связана с обозначением переднего или заднего диапазона за счет включения узлов сцепления 108 или 110 соответственно. Наконец, дополнительный диапазон может быть обеспечен за счет включения узлов сцепления , 104, и , 106, .
Например, для обеспечения диапазона движения вперед-назад могут быть включены узлы сцепления , 102, и , 108, . Соответственно, вращение коронной шестерни 80 первой планетарной шестерни 14 передается через узел сцепления 102 на солнечную шестерню 92 .При включении узла сцепления 108 солнечная шестерня 90 удерживается неподвижно. Мощность дополнительно передается через вторую планетарную передачу 22 для вывода через водило 94 на выходной элемент 120 , от которого мощность передается через модуль коробки передач 30 на конечный выходной элемент 126 . Из-за зацепления узла сцепления 108 эта работа в низком диапазоне обеспечивается в прямом направлении.Однако при работе, когда сцепленные узлы , 102, и , 110, включены, коронная шестерня , 100, остается неподвижной. В результате выход нижнего диапазона на выходной элемент , 120, обеспечивается в обратном направлении.
Точно так же, чтобы обеспечить высокий передний диапазон, могут быть включены узлы сцепления , 104, и 108, . Соответственно, вращение солнечной шестерни , 72, первой планетарной шестерни 14 передается через узел сцепления 104 на солнечную шестерню 92 .Как объяснено выше, при зацеплении узла 108 сцепления солнечная шестерня , 90, второй планетарной шестерни 22 удерживается неподвижно. Мощность дополнительно передается через вторую планетарную передачу 22 для вывода через водило 94 на выходной элемент 120 , от которого мощность передается через модуль коробки передач 30 на конечный выходной элемент 126 . Из-за зацепления узла сцепления , 108, эта работа в высоком диапазоне обеспечивается в обратном направлении.Однако при работе, когда сцепленные узлы , 104, и , 110, включены, коронная шестерня , 100, остается неподвижной. В результате выход высокого диапазона на выходной элемент , 120, обеспечивается в обратном направлении.
Дополнительно или альтернативно, модуль 20, диапазона может обеспечивать дополнительный диапазон выходному элементу , 120, . Во вспомогательном диапазоне могут быть включены узлы сцепления , 104, и , 106, .В результате мощность от дифференциального модуля 12 передается через солнечную шестерню 72 на солнечную шестерню 92 . Однако из-за зацепления узла сцепления , 106, это вращение передается водилу планетарной передачи 94 и выводится через выходной элемент , 120, на модуль откидной коробки 30 , который передает вращение на конечный выходной элемент. 126 .
Раскрытый вариатор 10 может обеспечивать более компактную упаковку, чем другие вариаторы, тем самым позволяя упаковывать вариатор 10 в машины меньшего размера или места с ограниченным пространством, такие как автогрейдер, колесный погрузчик и / или как.Например, конфигурации вариатора на фиг. 1-3 может разрешить использование более коротких валов (например, приводных валов, промежуточных валов и / или т.п.), таких как более короткий входной элемент , 48, , более короткий первый соединительный элемент , 66, , более короткий второй соединительный элемент. 68 и / или тому подобное по сравнению с другими конфигурациями вариатора. Это может уменьшить длину и / или ширину вариатора 10 , делая вариатор 10 подходящим для машин с ограниченным пространством и / или конструктивными ограничениями, такими как небольшой угол вылета.Например, вариатор, показанный на фиг. 1 может подходить для машин, которые требуют более короткого пакета и допускают более широкий пакет, тогда как вариаторы, показанные на фиг. 2 и 3 могут подходить для машин, которые требуют более узкой упаковки и допускают более длинную упаковку. Кроме того, за счет уменьшения длины одного или нескольких валов вариатора 10 можно снизить стоимость вариатора 10 , уменьшить вес вариатора 10 , сложность вариатора 10 могут быть уменьшены и / или тому подобное.
Используемые здесь статьи «а» и «an» предназначены для включения одного или нескольких элементов и могут использоваться взаимозаменяемо с «одним или несколькими». Кроме того, используемые в данном документе термины «имеет», «иметь», «иметь» и т.п. предназначены как неограниченные термины. Кроме того, фраза «на основе» предназначена для обозначения «основанная, по крайней мере частично, на».
Вышеупомянутое раскрытие обеспечивает иллюстрацию и описание, но не предназначено для того, чтобы быть исчерпывающим или ограничивать реализации точной раскрытой формой.Модификации и вариации возможны в свете вышеизложенного раскрытия или могут быть получены из практики реализации. Предполагается, что данное описание следует рассматривать только как пример, при этом истинный объем раскрытия указывается следующей формулой изобретения и ее эквивалентами.
Анализ и проверка силовых характеристик гидромеханической трансмиссии сельскохозяйственных тракторов
К. Э. Геринг, М. Л. Стоун, Д. В.Смит и П. К. Тернквист, Принципы разработки внедорожных транспортных средств , Американское общество инженеров сельского хозяйства (ASAE), Майами, США (2003).
Книга
Google Scholar
Т. Муто, Х. Като, К. Сакамото и Ю. Ямада, Цифровое управление системой гидростатической трансмиссии, управляемой дифференциальной широтно-импульсной модуляцией, Транзакция Японского общества инженеров-механиков, серия C , 61 (590) (1995) 3983–3990.
Артикул
Google Scholar
Г. Х. Ли, Д. С. Ким и Д. С. Юнг, Концептуальный дизайн HCVT (бесступенчатая трансмиссия гидромеханического типа) для городских автобусов, Конгресс и выставка инженеров коммерческого транспорта SAE , Иллинойс, США (2004 г.) ).
Google Scholar
Дж. Х. Кресс, Гидростатическая трансмиссия с разделением мощности для колесных транспортных средств — Классификация и теория работы , SAE 680549 (1968).
Книга
Google Scholar
Дж. Пичард и Б. Бессон, Примеры проектирования и применения гидростатических трансмиссий с разделением мощности, Journal of Engineering for Power , 103 (1) (1981) 168–173.
Артикул
Google Scholar
А. Хедман, Метод анализа систем механической передачи , Отчет № 1985-11-08, Отдел машинных элементов, Технологический университет Чалмерса, Гетеборг, Швеция, 9-13 (1985) .
Google Scholar
А. Хедман, Компьютерный анализ общих систем механической трансмиссии — некоторые примеры, Вторая международная конференция по новым разработкам в области разработки силовых агрегатов и шасси , Страсбург, Франция (1989) 10–13.
Google Scholar
DH Sung, HE Kim, GH Lee and HS Kim, Характеристики передачи мощности гидромеханической трансмиссии, Transactions of the Korean Society of Mechanical Engineers A , 25 (11) (2001) 1854– 1862 г.
Google Scholar
DH Sung, HE Kim, GH Lee and HS Kim, Анализ силовых характеристик гидромеханической трансмиссии с учетом потери потока HSU, Транзакции Корейского общества инженеров-механиков A , 26 (6) (2002 г.) ) 1149–1158.
Артикул
Google Scholar
Д. Сунг, С. Хван и Х. Ким, Проектирование гидромеханической передачи с использованием сетевого анализа, Proc.IMechE. , 219 (2005) 53–63.
Артикул
Google Scholar
Н. Ким, Дж. Ким и Х. Ким, Управление двухрежимной трансмиссией с разделением мощности для гибридного электромобиля, The World Electric Vehicle Journal , 2 (4) (2008) 118–127 .
Google Scholar
С. Ан, Дж. Чой, С. Ким, Дж. Ли, К. Чой и Х. Ким, Разработка интегрированного алгоритма управления двигателем и гидромеханической трансмиссией для трактора, Advanced in Машиностроение , 7 (7) (2015) 1–18.
Артикул
Google Scholar
K. Pettersson, K.-E. Ридберг и П. Крус, Сравнительное исследование многорежимных трансмиссий с разделением мощности для колесных погрузчиков , Двенадцатая Скандинавская международная конференция по гидравлической энергии, Тампере, Финляндия (2011).
Google Scholar
С. Меркати, Ф. Паниццоло и Г. Профумо, Гидромеханическая регулируемая трансмиссия с разделением мощности (HVT) для внедорожных транспортных средств, 10-я Международная конференция по гидравлической энергии , Дрезден, Германия (2016).
Google Scholar
П. Й. Ли и Ф. Менсинг, Оптимизация и управление гибридным гидравлическим пассажирским транспортным средством на основе гидромеханической трансмиссии, 7-я Международная конференция по гидроэнергетике , Аахен, Германия (2010).
J. Looman, Zahnradgetriebe – Grundlagen, Konstruktionen, Anwendungen in Fahrzeugen , Springer, Berlin, Germany (2009).
Google Scholar
D.H. Sung, Характеристики мощности и конструкция системы передачи с разделением мощности , неопубликованная докторская диссертация, Университет Сунгюнкван, Сувон, Корея (2007).
Google Scholar
KISSSoft AG, KISSSoft Release 03/2012 Руководство пользователя , Бубикон, Швейцария (2013).
Анализ эффективности гидромеханической трансмиссии
[1]
Майкл Дж.К. Шелленбергер. Рассмотрение конструкции гидравлических приводов с регулируемой разделенной мощностью для промышленного применения [D]. Моргантаун: Univ. Западной Вирджинии, (1999).
[2]
Ni Xiangdong, Zhu Sihong, Ouyang Daye и др.Разработка и эксперимент гидромеханического передаточного числа вариатора для трактора [J]. Транзакции ASAE, 2013, 44 (4): 15-20.
[3]
Аларико Макор, Антонио Россетти.Снижение расхода топлива в городских автобусах за счет использования коробок передач с разделением мощности [J]. Преобразование энергии и управление, 2013, 71: 159-171.
DOI: 10.1016 / j.enconman.2013.03.019
[4]
Гао Сян, Чжу Чжэнь, Чжу Ю.Анализ характеристик передачи HMCVT [J]. Журнал Чунцинского университета Цзяотун: естественные науки, 2013, 32 (4): 715-724.
[5]
Сюй Лию, Чжоу Чжили, Чжан Минчжу и др.Анализ характеристик гидромеханической бесступенчатой трансмиссии трактора [J]. Журнал Китайского сельскохозяйственного университета, 2006 г., 11 (5): 70-74.
DOI: 10.1109 / ical.2009.5262944
[6]
Яо Хуайсинь.Анализ гидравлической системы привода шасси строительной техники (1) [J]. Дорожная техника и строительная механизация, 2003, 6: 60-62.
[7]
Рао Чжэнган.Конструкция планетарной передачи [М]. Пекин: Химическая промышленность Press, (2003).
[8]
Ван Гуанмин, Чжу Сихонг, Ши Лисинь и др.Моделирование и эксперимент по оценке эффективности гидравлической механической бесступенчатой трансмиссии для трактора [J]. Транзакция Китайского общества сельскохозяйственной инженерии, 2013, 29 (15): 42-48.
Новая гидромеханическая вариаторная трансмиссия
Инженеры Dana Rexroth Transmission Systems завершили окончательные контрольные испытания гидромеханической регулируемой трансмиссии R2 (HVT), начало производства которой ожидается в третьем квартале 2015 года.По данным компании, полевые испытания работающих автомобилей показали экономию топлива до 25% по сравнению с традиционными конструкциями трансмиссии, с дополнительной экономией, возможной за счет дальнейшей оптимизации подсистем оборудования. Являясь продуктом совместного предприятия Dana Holding Corp. и Bosch Rexroth, HVT R2 имеет модульную конструкцию, которая может быть адаптирована для различных внедорожных применений с полезной потребляемой мощностью от 135 до 195 кВт (от 180 до 260 л.с.), включая фронтальные погрузчики, автогрейдеры, промышленные погрузчики, ричстакеры, трелевочные тракторы и другие внедорожные машины.HVT от Dana Rexroth сокращают расход топлива за счет снижения частоты вращения двигателя в течение рабочего цикла и на холостом ходу, где скорость может быть снижена до 600 об / мин. Анализ приложений демонстрирует возможность дополнительной экономии без снижения производительности за счет уменьшения размера двигателя.
Dana Rexroth HVT обеспечивают чувствительное и точное позиционирование автомобиля с бесступенчатым приводом, который обеспечивает улучшенное ускорение при сохранении тягового усилия. Они оптимизируют рабочую точку дизельного двигателя, отделяя частоту вращения двигателя от скорости движения, а затраты на техническое обслуживание снижаются за счет использования гидростатического торможения и неизнашиваемого реверсирования без муфт.
HVT R2 — это модульная платформа, которая предоставляет полный набор опций конфигурации и программных средств управления, таких как прямой или удаленный монтаж, гибкость в управлении переключением передач и параметрах стратегии привода, а также развертывание до трех насосов отбора мощности.
Система HVT, разработанная Даной Рексрот, помогает снизить сложность для производителей оборудования, поскольку вся система шестерен, муфт и гидростатических узлов управляется усовершенствованным электронным блоком управления и оптимизирована для повышения эффективности одним поставщиком.
HVT R2 будет представлен Dana как часть 21-тонной (23-тонной) трансмиссии для фронтальных погрузчиков на Intermat в апреле.
.