Роботизированная коробка передач что это: Роботизированная коробка переключения передач (РКПП): особенности и специфика устройства
Роботизированная коробка передач автомобиля — устройство и как работает
Роботизированная коробка передач автомобиля — разновидность полуавтоматических КПП, которая объединяет черты механической коробки и автоматической. Расскажем что такое коробка — робот, как работает и в чем преимущество перед другими типами трансмиссии.
Что это такое
Вместо третьей педали, которую нужно выжать для переключения скоростей с механической коробкой передач, в авто с роботизированной коробкой передач две педали. Роль третьей педали играет целая система сенсоров, передатчиков и исполнительных механизмов, которые при помощи бортового компьютера переключают коробку без участия водителя и сцепления.
Компьютер синхронизирует работу деталей коробки, а некоторые электронные системы способны научиться распознавать стиль вождения водителя и предугадывать его действия. У роботизированной КПП ручка переключения скоростей находится там же, где и ручка механической коробки, но вместо Ж-образного переключения, ручка переключается только вперед или назад.
Как работает
Работает следующим образом. При переключении ручки передач и нажатии педали газа сенсоры передают информацию в блок управления, который в свою очередь передает сигнал в коробку передач. Сенсоры коробки передач также сообщают в блок информацию о действующей скорости и новом требовании переключения скоростей.
Блок управления синхронизирует информацию, полученную от сенсоров, и выбирает оптимальную скорость и время переключения скоростей и обеспечивает слаженность работы механизмов коробки передач. При этом принимается в расчет скорость вращения двигателя, работа кондиционера, показатели спидометра.
Бортовой компьютер роботизированной КПП управляет гидромеханикой, который смыкает или размыкает сцепление. Этот процесс происходит синхронно с действием водителя, переключающего ручку скоростей. Гидромеханический блок использует жидкость из тормозной системы для запуска гидравлического цилиндра, обеспечивающего движение актуатора.
В чём преимущество
Электроника реагирует быстрее человека и более точно, поэтому «выжать» сцепление можно без участия водителя. Для парковки автомобиля, обратного хода или нейтрального положения трансмиссии водитель должен предварительно выжать обе педали одновременно, после этого можно выбрать один из трех вариантов.
Для парковки автомобиля, обратного хода или нейтрального положения трансмиссии водитель должен предварительно выжать обе педали одновременно, после этого можно выбрать один из трех вариантов.
Сцепление нужно только, чтобы машина пришла в движение. Для быстрого переключения скорости на более высокую необходимо убрать ногу с педали газа, чтобы двигатель сбавил обороты для подходящей скорости. Для этого ручка передачи скоростей должна стоять на нужной позиции.
DSG – немецкий «робот» для автомобиля
Аббревиатура DSG по-немецки (Direkt Schalt Getriebe) и по-английски (Direct Shift Gearbox) означает одно и то же: «коробка передач прямого переключения». Впервые разработкой такой КПП занимался француз по имени Адольф Кегресс, сотрудничая с компанией Citroen в 30-е годы ХХ века. Именно ему приписывают идею о создании агрегата с гидромеханическим управлением и двумя сцеплениями. Но конструкцию посчитали сложной, и она не получила широкого распространения. Ее плюсы были оценены уже гораздо позже, когда за дело взялись немецкие инженеры. Попытки создания подобной коробки предпринимали в Porsche, но «настоящая» DSG увидела свет в недрах конструкторского бюро Volkswagen Group.
Попытки создания подобной коробки предпринимали в Porsche, но «настоящая» DSG увидела свет в недрах конструкторского бюро Volkswagen Group.
Первая «серийная» коробка передач DSG была установлена на Volkswagen Golf R32 в 2002 году – а к настоящему времени число проданных автомобилей Volkswagen, Audi, SEAT и Skoda, оснащённых DSG, уже перевалило за 10 000 000. Сегодня автолюбители хорошо знают, что такое DSG, и сколько возможностей она открывает для водителя.
Основные особенности
Главная особенность DSG заключается в том, что она помогает переключить скорости и одновременно сохранить мощность в процессе движения. По сравнению с другими роботизированными коробками передач, у DSG есть такие качества, как экономия топлива и отличная динамика во время набора скорости.
DSG состоит из коробки передач и двух сцеплений. Эта простая система позволяет быстро переключать передачи, а автомобиль за счет этого разгоняется за считанные мгновения.
Как обычно работает механическая коробка? Пока происходит переключение скоростей, теряется динамика. Коробка DSG сводит эту проблему к минимуму, ведь в ней одно сцепление относится к нечетным рядам, а второе – к четным. Пока машина разгоняется, набирая первую скорость, диск на четном ряду сразу включается, и перерывов в разгоне нет.
Коробка DSG сводит эту проблему к минимуму, ведь в ней одно сцепление относится к нечетным рядам, а второе – к четным. Пока машина разгоняется, набирая первую скорость, диск на четном ряду сразу включается, и перерывов в разгоне нет.
Плюсы DSG
- Подобный режим переключения скоростей позволяет уменьшить расход бензина. Установлено, что автомобили с DSG потребляют на 10% меньше топлива, чем средства передвижения с обычной коробкой передач.
- Динамичное ускорение – еще один важный плюс. Передачи переключаются всего за 8 миллисекунд! Никакого эффекта «резиновой» тяги, который часто встречается в автоматических коробках передач, здесь нет.
- Если захочется, всегда можно переключать передачи вручную, установив мануальный режим. Так что DSG – это еще и универсальная система.
- DSG на 20 процентов легче, чем гидромеханическая трансмиссия.
- Показатель надежности у DSG в несколько раз лучше «механики»: средний срок службы составляет 300 тысяч километров.
 Трансмиссионную жидкость в моделях DSG 6 необходимо менять через каждые 100 тысяч километров пробега, то есть не слишком часто. А, например, DSG 7 вообще не требует никаких вмешательств в течение всего периода эксплуатации.
Трансмиссионную жидкость в моделях DSG 6 необходимо менять через каждые 100 тысяч километров пробега, то есть не слишком часто. А, например, DSG 7 вообще не требует никаких вмешательств в течение всего периода эксплуатации.
 Трансмиссионную жидкость в моделях DSG 6 необходимо менять через каждые 100 тысяч километров пробега, то есть не слишком часто. А, например, DSG 7 вообще не требует никаких вмешательств в течение всего периода эксплуатации.
Трансмиссионную жидкость в моделях DSG 6 необходимо менять через каждые 100 тысяч километров пробега, то есть не слишком часто. А, например, DSG 7 вообще не требует никаких вмешательств в течение всего периода эксплуатации.Что важно знать о DSG?
- Для идеальной работы DSG нужно заправлять автомобиль только качественным топливом, иначе дешевый бензин существенно сократит срок службы коробки передач.
- Дрифтовать на автомобиле с DSG не рекомендуется – система может попросту сломаться.
- Как и у всякой коробки передач, у DSG тоже есть слабое место. Так, это сцепление нечетных передач, потому что на него осуществляется максимальная нагрузка, когда машина начинает двигаться. Эта проблема знакома жителям мегаполисов, которые часто стоят в пробках. В этом случае автомобиль переводится на холостой ход с первой скоростью. Водитель придерживает и периодически отпускает педаль газа, а потом снова притормаживает. Сцепление при этом почти активировано, и в результате этого происходит постоянное трение. Происходит перегрев сцепления, и таким образом оно может быстрее износиться.
 Происходит перегрев сцепления, и таким образом оно может быстрее износиться.
Происходит перегрев сцепления, и таким образом оно может быстрее износиться.Кому вообще стоит покупать автомобиль с DSG? Прежде всего, тем, кто хочет сэкономить на горючем – оно не будет расходоваться впустую. Автомобиль с такой коробкой передач отлично зарекомендовал себя как на горных серпантинах, так и на скоростных трассах в городе. Если для населенного пункта не характерны пробки, то здесь и думать нечего – стоит брать!
Также важно заметить, что постоянного переключения четных и нечетных передач DSG не «любит», так же, как и медленной езды. В остальном же эта система будет работать без проблем, к удовольствию водителя.
Как менять масло в роботе, роботизированной коробке − Советы
Роботизированная коробка передач – это, по сути, МКПП, в которой автоматизированы функции выключения сцепления и переключения скоростей за счет использования ЭБУ (электронного блока управления) и исполнительных устройств – сервоприводов, гидроприводов и др. При этом порядок техобслуживания РКПП существенно отличается от правил ТО обычной «механики». Как менять масло в коробке-роботе, и как часто нужно выполнять эту процедуру?
Как менять масло в коробке-роботе, и как часто нужно выполнять эту процедуру?
Как проверить состояние масла в роботе
Чтобы оценить состояние смазочной жидкости в роботизированной коробке передач, используют разные способы. Качество масла можно определить, например, по цвету, точнее, по оттенку. Если материал светлый и прозрачный, можно продолжать его использовать. Если же масло мутное, а тем более – содержит мелкие частицы в виде продуктов износа, его лучше поменять. Еще один повод обновить смазочную жидкость – запах гари, который свидетельствует о многократных случаях ее перегрева.
Особенности эксплуатации, влияющие на интервал замены
В зависимости от особенностей конструкции РКПП может быть одного из типов: AMT (автоматизированная механическая трансмиссия) или DSG – с одним или двумя пакетами сцепления соответственно. Коробки DSG в свою очередь делятся на оснащенные «сухим» и «мокрым» сцеплением. Во втором случае диски механизма погружены в трансмиссионное масло. Именно преселективные коробки с двухдисковым сцеплением отличаются довольно быстрой изнашиваемостью как самих дисков, так и сервомеханизмов, гидроприводов, гидроблока и т. д. Продлить жизнь этим деталям и механизмам можно регулярной своевременной заменой смазочной жидкости. Это необходимо делать, даже если в руководстве к роботизированной коробке утверждается, что она необслуживаемая. При этом на периодичность проведения такой процедуры могут оказывать влияние условия эксплуатации. Агрессивная езда, передвижение по бездорожью, буксир прицепа, перевозка тяжелых грузов сокращают интервал замены на 20–40 %.
Именно преселективные коробки с двухдисковым сцеплением отличаются довольно быстрой изнашиваемостью как самих дисков, так и сервомеханизмов, гидроприводов, гидроблока и т. д. Продлить жизнь этим деталям и механизмам можно регулярной своевременной заменой смазочной жидкости. Это необходимо делать, даже если в руководстве к роботизированной коробке утверждается, что она необслуживаемая. При этом на периодичность проведения такой процедуры могут оказывать влияние условия эксплуатации. Агрессивная езда, передвижение по бездорожью, буксир прицепа, перевозка тяжелых грузов сокращают интервал замены на 20–40 %.
Какое масло использовать для роботизированной коробки
Лучшим маслом для роботизированной коробки всегда является указанный в технической документации тип жидкости. Если нет возможности залить смазочный материал, рекомендованный производителем, можно вместо него использовать продукт с близкими характеристиками от надежного производителя, например, из каталога ROLF Lubricants.
Когда нужно менять масло
Смазочную жидкость в роботах с одним пакетом сцепления рекомендуется менять максимум через 80 тысяч км пробега. В преселективных коробках с двойным сцеплением (например, DSG) масло меняют через каждые 60–70 тысяч км проделанного пути для «сухой» версии и через 50–60 тыс. километров – для «мокрой». Если же автомобиль с РКПП эксплуатируется в неблагоприятных условиях (перечисленных выше), сроки замены будут еще короче. Например, для коробки с одним сцеплением, установленной на автомобиль, водитель которого предпочитает агрессивную манеру вождения, интервал замены масла составит в среднем: 80 – 80 х 0,3 = 56 тысяч км пробега.
Пошаговая инструкция
Частичная замена
При частичном обновлении отработанная жидкость удаляется только из картера через сливное отверстие. От трети до половины смазочного материала остается при этом в коробке. Для выполнения процедуры необходимо:
- Прогреть РКПП, проехав на автомобиле 10–15 км;
- Установить машину над смотровой ямой или поднять на подъемнике для получения доступа к коробке;
- Снять защиту ДВС;
- Открутить пробки сливного и заливного отверстий и собрать отработку в заранее подготовленную емкость;
- Закрутить пробку сливного отверстия и долить масло до требуемого уровня (пока не начнет выливаться). Поставить на место защиту ДВС.
 Поставить на место защиту ДВС.
Поставить на место защиту ДВС.
Полная замена
Для выполнения полной замены смазочной жидкости в РКПП используется специальная установка, которую подключают к магистралям гидросистемы коробки. Под действием высокого давления старое масло вытесняется из агрегата и заменяется новым. За процессом замены можно наблюдать через смотровые окошки: поток темной и грязной массы постепенно сменяется чистой и прозрачной жидкостью. При этом потребуется немного больше смазочного материала: если заправочный объем составляет, к примеру, 9 литров, то на полную замену уйдет 10–11 л. Выполнять такую процедуру лучше после консультации со специалистом, т. к. в некоторых случаях она может негативно отразиться на работе трансмиссии. Это связано с тем, что, обладая более высокой моющей способностью, новое масло может засорить гидросистему продуктами износа, пребывавшими ранее в состоянии покоя.
Роботизированная коробка передач (РКПП)
Итак, что такое роботизированная коробка передач и какое ее назначение? Роботизированная КПП, как и все предыдущие варианты, имеет следующее предназначение: прием, передача, преобразование крутящего момента с последующей передачей его к ведущим колесам автомобиля. Для человека несведущего, слово «роботизированная» вносит некую неясность, а именно – как робот переключает передачи. Если ответить с юмором, то в коробке не сидит «дядя робот» и не переключает своими железными руками рычаг управления передачами. Вместо «дяди робота» есть «умная» автоматика управления и необходимое количество исполнительных устройств. Но обо всем по порядку…
Для человека несведущего, слово «роботизированная» вносит некую неясность, а именно – как робот переключает передачи. Если ответить с юмором, то в коробке не сидит «дядя робот» и не переключает своими железными руками рычаг управления передачами. Вместо «дяди робота» есть «умная» автоматика управления и необходимое количество исполнительных устройств. Но обо всем по порядку…
Условно РКПП (роботизированная коробка передач) состоит из «простой» механической коробки передач, устройств выжима сцепления и переключения передач (актуаторов), микропроцессорной системы управления и внешних датчиков. Можно ли считать РКПП неким вариантом АКПП? Сразу отметим – нет! Принцип построения «робота» ближе к «механике», с автоматическим управлением. Единственное сходство с автоматической коробкой передач это наличие сцепления в корпусе коробки, а не на маховике как в «механике». И в современных коробках находится два сцепления, для чего это нужно расскажем ниже.
Теперь о компонентах и узлах:
- РКПП – узел, собранный по принципу МКПП, но имеющий два ведущих вала, которые находятся друг в друге, т. е. внешний вал имеет внутреннюю полость, в который вставляется внутренний первичный вал. На внешнем валу находятся шестерни привода второй, четвертой и шестой передачи, для шести ступенчатой коробки. Соответственно на внутреннем валу имеются шестерни пары первой, третьей, пятой и задней передачи. Каждый из валов имеет свое сцепление.
- Актуаторы – это электрические или гидравлические сервоприводы, которые предназначены для механического передвижения синхронизаторов коробки передач и включения\выключения сцеплений. Электрический актуатор представляет собой электродвигатель с редуктором, а гидравлический — это простой гидроцилиндр, у которого шток связан с нужным синхронизатором.
- Микропроцессорный блок управления (МБУ) – основной узел «сердцем», которого является довольно мощный процессор. К процессору через буферные порты подключены внешние датчики от двигателя внутреннего сгорания, систем ESP, ABS и др. Обычно блок управления коробкой совмещен с бортовым компьютером. Для хранения данных о том, что должна выполнять коробка передач при поступлении той или иной информации от датчиков, применяется ПЗУ, в которое и «заливается» алгоритм работы, в народе именуемой «прошивкой».
 е. внешний вал имеет внутреннюю полость, в который вставляется внутренний первичный вал. На внешнем валу находятся шестерни привода второй, четвертой и шестой передачи, для шести ступенчатой коробки. Соответственно на внутреннем валу имеются шестерни пары первой, третьей, пятой и задней передачи. Каждый из валов имеет свое сцепление.
е. внешний вал имеет внутреннюю полость, в который вставляется внутренний первичный вал. На внешнем валу находятся шестерни привода второй, четвертой и шестой передачи, для шести ступенчатой коробки. Соответственно на внутреннем валу имеются шестерни пары первой, третьей, пятой и задней передачи. Каждый из валов имеет свое сцепление.
 Для хранения данных о том, что должна выполнять коробка передач при поступлении той или иной информации от датчиков, применяется ПЗУ, в которое и «заливается» алгоритм работы, в народе именуемой «прошивкой».
Для хранения данных о том, что должна выполнять коробка передач при поступлении той или иной информации от датчиков, применяется ПЗУ, в которое и «заливается» алгоритм работы, в народе именуемой «прошивкой».
Рассмотрим принцип работы. В начале движения, как и у МКПП, должно плавно включиться сцепление. За это «отвечает» актуатор сцепления, который по команде МБУ медленно вращает редуктор. Сигнал на начало движения дает водитель, включив рычажок переключателя. Включается первое сцепление внутреннего первичного вала, одновременно актуатор синхронизатора подводит его к шестерне первой передачи, далее идет блокировка шестерни на валу, которая приводит в действие шестерню вторичного вала. Автомобиль тронулся с места, но водитель продолжает нажимать педаль акселератора… Сколько нужно времени, что бы включилась вторая передача, не повредив шестерни, синхронизаторы и прочее? Наверное, продолжительное. Именно первые «роботы» и «страдали» провалами между переключениями, потому, что электронике так же надо подумать, что бы ни сломать себя. Вот именно для сокращения времени переключения и было введено в конструкцию коробки второе сцепление и второй вал. Весь алгоритм работы сводится к тому, что пока работает первая передача, уже ждет включения вторая и как только МБУ даст команду, включается второе сцепление, внешний первичный вал и вторая передача. Далее по накатанной, – ждет сигнал третья передача и т.д. Время переключения сокращается до минимума, даже водитель не сможет так быстро переключить МКПП.
Вот именно для сокращения времени переключения и было введено в конструкцию коробки второе сцепление и второй вал. Весь алгоритм работы сводится к тому, что пока работает первая передача, уже ждет включения вторая и как только МБУ даст команду, включается второе сцепление, внешний первичный вал и вторая передача. Далее по накатанной, – ждет сигнал третья передача и т.д. Время переключения сокращается до минимума, даже водитель не сможет так быстро переключить МКПП.
МБУ выдает сигналы, анализируя поступившие данные с внешних датчиков. При уменьшении скорости движения или увеличении нагрузки, например, подъем в гору, МБУ переключает в обратной последовательности передачи.
А как же быть, если нужна только пониженная передача, например, для преодоления препятствий? Для этого на МБУ водитель подает сигнал к отмене дальнейших передач после первой. Для езды задним ходом, так же в блок управления подается команда, при которой актуатор приводит в действие внутренний первичный вал и шестерню заднего хода.
Для езды задним ходом, так же в блок управления подается команда, при которой актуатор приводит в действие внутренний первичный вал и шестерню заднего хода.
Современные «коробки-роботы» это концепция, разработанная в 80-х, но с применением новейших разработок улучшающих работу коробки. Каждый производитель старается внести что-то новое и зарегистрировать свой товарный знак.
Например «Ricardo» на свой «Eаsytronic» начала устанавливать один многофункциональный актуатор, что поспособствовало уменьшению габаритных размеров «робота».
Volkswagen начал массово устанавливать на свои автомобили КПП робот под аббревиатурой S-tronic, (коробка прямого включения), что характерно, были разработаны варианты и для заднеприводных авто.
Свои разработки улучшающие работу коробок-роботов имеются во многих компаниях (Ford, Fiat, Mitsubishi, BMW).
|
Функционирование роботизированной коробки передач
Совсем скоро привычную для многих Н-схему (в русской версии это Ж-схема) переключения передач сменит селектор с пазом в форме «зю».![]() Как говорят инструкторы по вождению, тренировать левую ногу будущим водителям будет уже незачем. Сегодня пойдет речь о принципах работы коробки-робота, той самой DSG.
Как говорят инструкторы по вождению, тренировать левую ногу будущим водителям будет уже незачем. Сегодня пойдет речь о принципах работы коробки-робота, той самой DSG.
Что такое роботизированная коробка?
Роботизированную коробку передач в обиходе называют коробкой-роботом. Подробней мы спросили об этом автоинструкторов, и вот что они нам разъяснили. Коробка-робот — это механическая коробка, где функции переключения передач и выключения сцепления автоматизированы. То есть условия движения и водитель формируют для системы управления лишь входную информацию, а работа коробки передач полностью зависит от электронного блока с заданным алгоритмом управления.
Надо сказать, что роботизированная коробка — это одновременно комфорт автоматической коробки, топливная экономичность механической и огромная надежность.
Кстати, «робот» значительно дешевле стандартной АКПП. Сегодня почти все ведущие производители оснащают свои авто именно такими коробками передач, причем и модели малого класса и премиум.
Отличие «механики» от «робота»
Основу классической механической коробки составляют первичный (он же ведущий в авто) и вторичный (ведомый). Крутящий момент от двигателя передается на первичный вал посредством специального механизма сцепления, далее преобразованный момент идет с вторичного вала на ведущие колеса авто. На валах есть шестерни, которые по две пары находятся в зацеплении. Шестерни на первичном закреплены очень жестко, в то время как на вторичном эти шестерни вращаются свободно. Если стоит «нейтраль», то последние сравнительно на валу прокручиваются свободно, таким образом, крутящего момента на колесах нет.
Чтобы включить передачу, водитель выжимает сцепление (отсоединяет от мотора первичный вал), далее на вторичном валу через систему тяг рычагом КПП перемещаются специальные устройства, которые называются синхронизаторы.
Муфта синхронизатора на валу блокирует вторичную шестерню необходимой передачи. Когда сцепление включено, крутящий момент с определенным коэффициентом идет на вторичный вал, потом на главную передачу, а затем на колеса. Принцип работы роботизированных коробок передач точно такой же. Но есть одно отличие: размыканием/смыканием сцепления, а также выбором передач здесь занимаются сервоприводы или, так называемые, актуаторы. Чаще всего это шаговый электрический мотор с исполнительным устройством и редуктором. Однако бывают и гидравлические актуаторы.
Принцип работы роботизированных коробок передач точно такой же. Но есть одно отличие: размыканием/смыканием сцепления, а также выбором передач здесь занимаются сервоприводы или, так называемые, актуаторы. Чаще всего это шаговый электрический мотор с исполнительным устройством и редуктором. Однако бывают и гидравлические актуаторы.
Функционирование актуаторов
Актуаторами коробки передач управляет электронный блок. При поступлении команды на переключение самый первый сервопривод начинает выжимать сцепление; в это же время второй двигает синхронизаторы, и нужная передача включается. Далее первый отпускает сцепление. Именно поэтому педаль сцепления в машине больше не нужна, ведь электроника сделает все сама.
Стоит отметить, что в ручном режиме команду на переключение дает водитель с помощью подрулевых лепестков или селектора КПП, а в автоматическом — команда поступает от компьютера, который способен учитывать обороты двигателя, скорость машины, информацию ABS, ESP и некоторых других систем автомобиля.
Недостатки «робота»
Основным недостатком такой коробки является длительность переключения передачи, вызывающая рывки в динамике машины, именно поэтому на всех роботизированных коробках установлен режим Tiptronic. Некоторые водители замечают, что коробка начинает просто сходить с ума особенно при медленном движении, например, в пробке.
Есть еще один минус — при движении по склону авто может покатиться назад, ведь у «робота» нет постоянной стыковки с движком.
То же самое касается движения по прямой, когда связь разрывается иногда совершенно неожиданно. Однако и в этом случае спасет Tiptronic.
Видеоматериал о том, как функционирует роботизированная коробка:
Желаем минимум пробок на дороге и попутного ветра!
В статье использовано изображение с сайта gazeta-a.ru
Роботизированная коробка передач — плюсы и минусы
Покупатели при выборе автомобиля большое значение уделяют коробке передач, помимо других его характеристик. Естественно желание людей — ездить с комфортом.
Естественно желание людей — ездить с комфортом.
В последнее время современные технологии представляют вниманию новые способы управления автомобилем. На смену механики приходит автоматика. Одним из новшеств является роботизированная коробка переключения передач.
Что это такое и как работает?
Роботизированной коробкой передач считается механическая КП, которая имеет автоматизированные функции управления сцеплением и переключением передач. По другому ее называют коробка-робот. Такие коробки имеют электрический или гидравлический привод сцепления и передач. Зависит от конкретного производителя.
Стоит для начала разобраться, как работает роботизированная коробка передач. Принцип её работы такой же, как у механической. Различие в том, что работой сцепления и выбором передач занимаются сервоприводы (актуаторы). В составе которых находится электромотор с редуктором и исполнительный механизм. Также есть и гидравлические актуаторы.
1 — блок управления; 2 — сервопривод сцепления; 3 — сервопривод переключения передач; 4 — датчик частоты вращения первичного вала.
В чем заключаются основные особенности управления роботизированной коробкой передач?
Роботизированная коробка передач имеет свои особенности управления. К основной можно отнести следующий фактор: управление производится путем использования специального блока на электронной основе, который воздействует на два актуатора.
Первый сервопривод отвечает за сцепление, а второй руководит работой синхронизаторов, которые отвечают за включение нужных передач. Этот подход позволяет освободить водителя от нажатия на педаль сцепления. Все функции берет на себя электроника.
Работа умной коробки может осуществляться в:
- автоматическом;
- ручном режимах.
При автоматическом, смена передач происходит по команде компьютера, который учитывает многие показатели (обороты двигателя, скорость, данные систем ABS, ESP и других). При ручном режиме, человек с помощью рычага селектора или подрулевых переключателей подает команду на переключение.
Видео: принцип работы сцепления и переключения передач на роботизированной коробке передач.
Плюсы и минусы использования роботизированной коробки передач
Появилась такая возможность управления коробкой передач относительно недавно, но при этом довольно быстро приобрела своих приверженцев. Ведь ездить на роботизированной коробке передач по отзывам некоторых — удобно и комфортно.
Но, использование роботизированной коробки передач имеет свои плюсы и минусы, как и любой другой вариант. Естественно, о них следует знать, при выборе варианта управления. Выявить такие моменты позволили многочисленные тестирования коробки-робота.
Плюсы использования агрегата:
- Конструкция этой коробки передач весьма надежна. Основой ее остается механика, которая испытана временем и изучена. Вместе с этим по надежности она превосходит вариаторную и автоматическую системы.
- Считается, что использование роботизированной коробки передач способствует экономии топлива. Такая экономия может составлять до 30 процентов.
- Коробка робот требует использования меньшего количества масла, достаточно 2-3 литров, тогда как вариатору требуется порядка 7 литров. Все это приводит к большей экономии средств.
- Число передач соответствует количеству передач механической коробки.
- В основе роботизированной коробки переключения передач та же самая механика. Это дает дополнительную возможность свободного и простого ремонта, который может произвести практически любой автомобильный слесарь. Поэтому проблем с ремонтом не возникнет, по крайней мере, большую часть распространенных поломок можно ликвидировать быстро и качественно в обычной автомастерской.
- Ресурс сцепления увеличен почти на 40 процентов, если сравнение производить с механикой. Это весьма существенная разница. Причем дело не только в экономии, но и в повышенной безопасности.
- В условиях города, когда возникают постоянные пробки, и на крутых подъемах весьма кстати будет функция ручного переключения передач, которая присутствует в коробке-роботе. Эта функция позволяет вспомнить о обычной механике, по которой многие автовладельцы скучают.
 Вместе с этим по надежности она превосходит вариаторную и автоматическую системы.
Вместе с этим по надежности она превосходит вариаторную и автоматическую системы. Причем дело не только в экономии, но и в повышенной безопасности.
Причем дело не только в экономии, но и в повышенной безопасности.Наряду с достоинствами имеются и недостатки данного вида коробки передач. К ним можно отнести:
- Главным недостатком многие автовладельцы считают невозможность перепрограммировать агрегат, с целью увеличить динамику или сэкономить ресурсы. Это также не позволяет подстроить коробку передач под свой стиль езды. Следует привыкнуть к манере работы определенной конструкции, чтобы использовать ее с удобством. Но русские умельцы находят выход из любой ситуации. После срока гарантийного использования автомобиля они просто меняют прошивку в блоке электронного управления.
- Скорость переключения передач робота несколько снижена, реакция замедленная. Это связано с некоторыми издержками программирования, как в любом автомате.
- При поездке по городу, в условиях пробок и по неровной местности необходимо переключаться на ручное управление. Иначе происходит быстрый износ сцепления и срок эксплуатации роботизированной коробки передач существенно снижается.
- В некоторых случаях при переключении передач можно ощутить рывки. Это объясняется тем, что не сбрасывается газ перед моментом переключения. Устранить эту неприятность можно, если нажимать педаль газа не полностью.
- На горке зачастую размыкается сцепление — это объясняется его перегревом. Поэтому для подъемов также лучше использовать ручной режим переключения.
 Это связано с некоторыми издержками программирования, как в любом автомате.
Это связано с некоторыми издержками программирования, как в любом автомате.Видео: как правильно ездить на роботизированной коробке передач.
Советы по выбору
Прежде чем покупать автомобиль с коробкой-роботом, стоит собрать как можно больше информации по работе конкретной модели.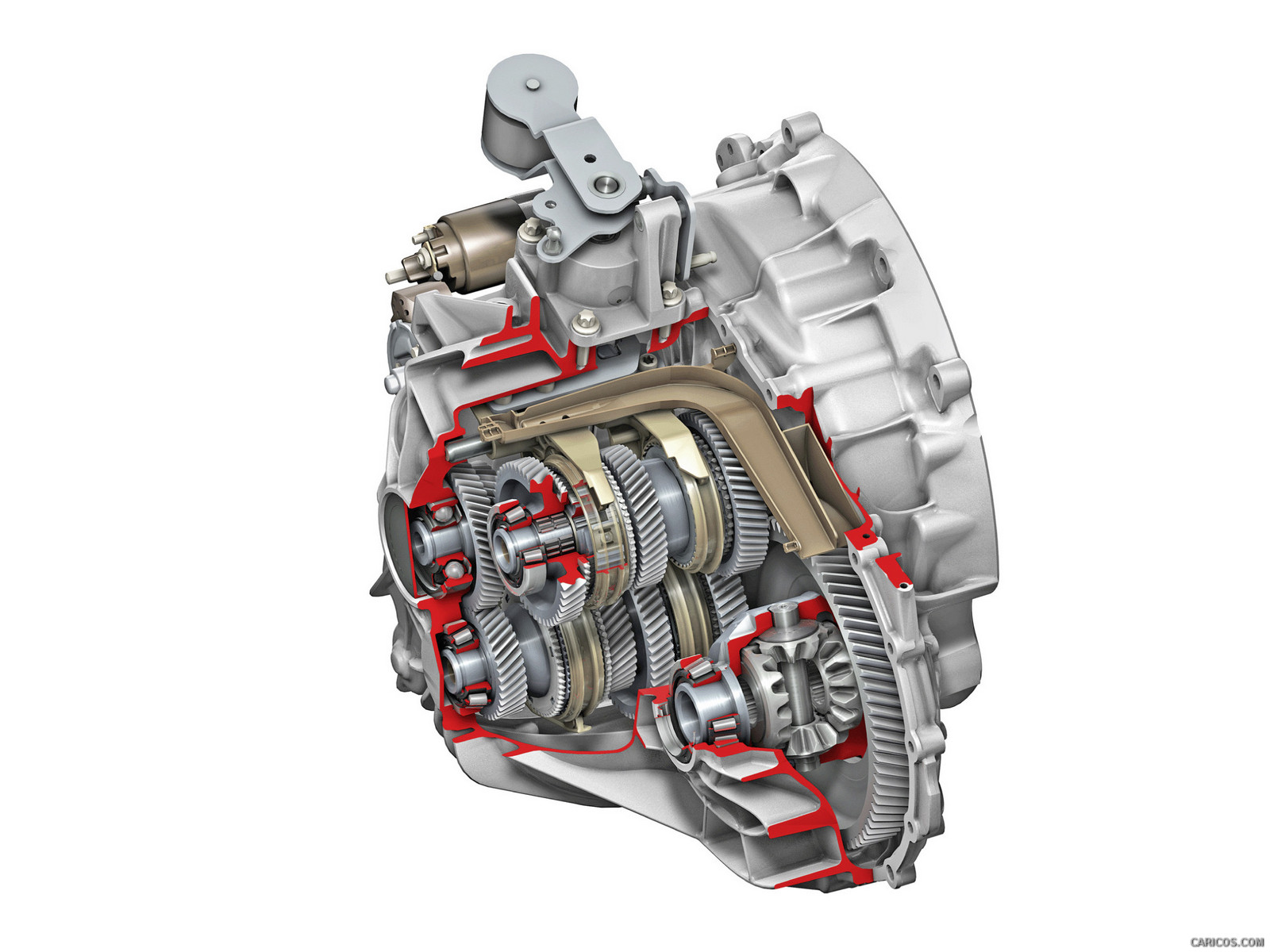 Некоторые из них имеют постоянные, ставшие уже нормой «глюки». Например, «задумчивость» некоторых роботов составляет около 2 секунд¸ то есть переключение передач происходит с определенным опозданием.
Некоторые из них имеют постоянные, ставшие уже нормой «глюки». Например, «задумчивость» некоторых роботов составляет около 2 секунд¸ то есть переключение передач происходит с определенным опозданием.
К проблемам можно отнести и излишнюю индивидуальность агрегатов. Даже одинаковые роботизированные коробки передач могут существенно отличаться. Такие серьезные отличия «лечатся», как правило, с помощью перепрошивки. Причем не стоит надеяться, что все само пройдет, лучше сразу обратиться к специалисту.
Но не всё так сумрачно. Например, по отзывам о роботизированной коробке передач Лада-Гранты больше половины владельцев этого автомобиля довольны таким вариантом управления. Считая, что с ним машина экономичнее и быстрее.
Видео: на АВТОВАЗе запущено производство LADA Granta с роботизированной КПП (АМТ).
Заключение. Думаю, что будущее все-таки за вариатором, а робот не приживется, к тому же он проигрывает и автомату. А вы, как думаете?!!
Думаю, что будущее все-таки за вариатором, а робот не приживется, к тому же он проигрывает и автомату. А вы, как думаете?!!
Загрузка…
Характеристики роботизированной коробки передач: плюсы и минусы
В коробке-роботе сочетаются удобство АКПП и высочайшая надежность, а также экономичность МКПП. Многие знают или слышали, что такое роботизированная коробка передач — плюсы и минусы этого чуда техники, а также ее особенности мы рассмотрим в данной статье.
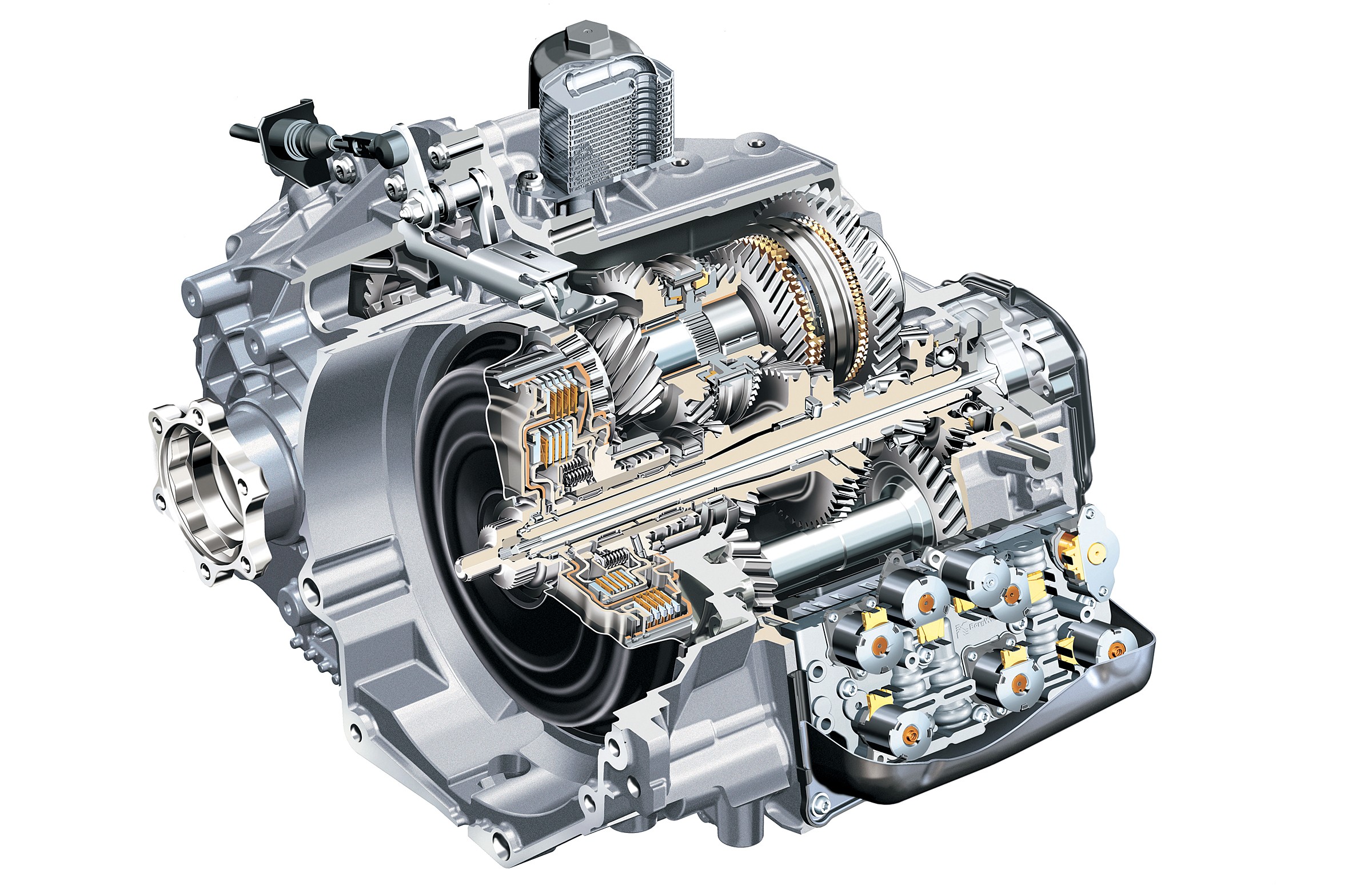
Коробка робот в разрезе
Немаловажный факт: коробка-робот намного дешевле традиционной автоматической коробки. Сейчас фактически все основные производители автомобилей оборудуют собственные авто коробками-роботами, оснащая ими практически все линейки.
Роботизированная КПП или же просто коробка-робот — это традиционная МКПП, в которой функции включения и выключения сцепления доверены автоматике. Из названия «роботизированная КПП» следует то, что водитель лишь предоставляет входные данные для автоматики, а самой работой КПП управляет ЭБУ (электронный блок управления), работающий по определенной программе.
Содержание
[ Раскрыть]
[ Скрыть]
Как устроена роботизированная коробка?
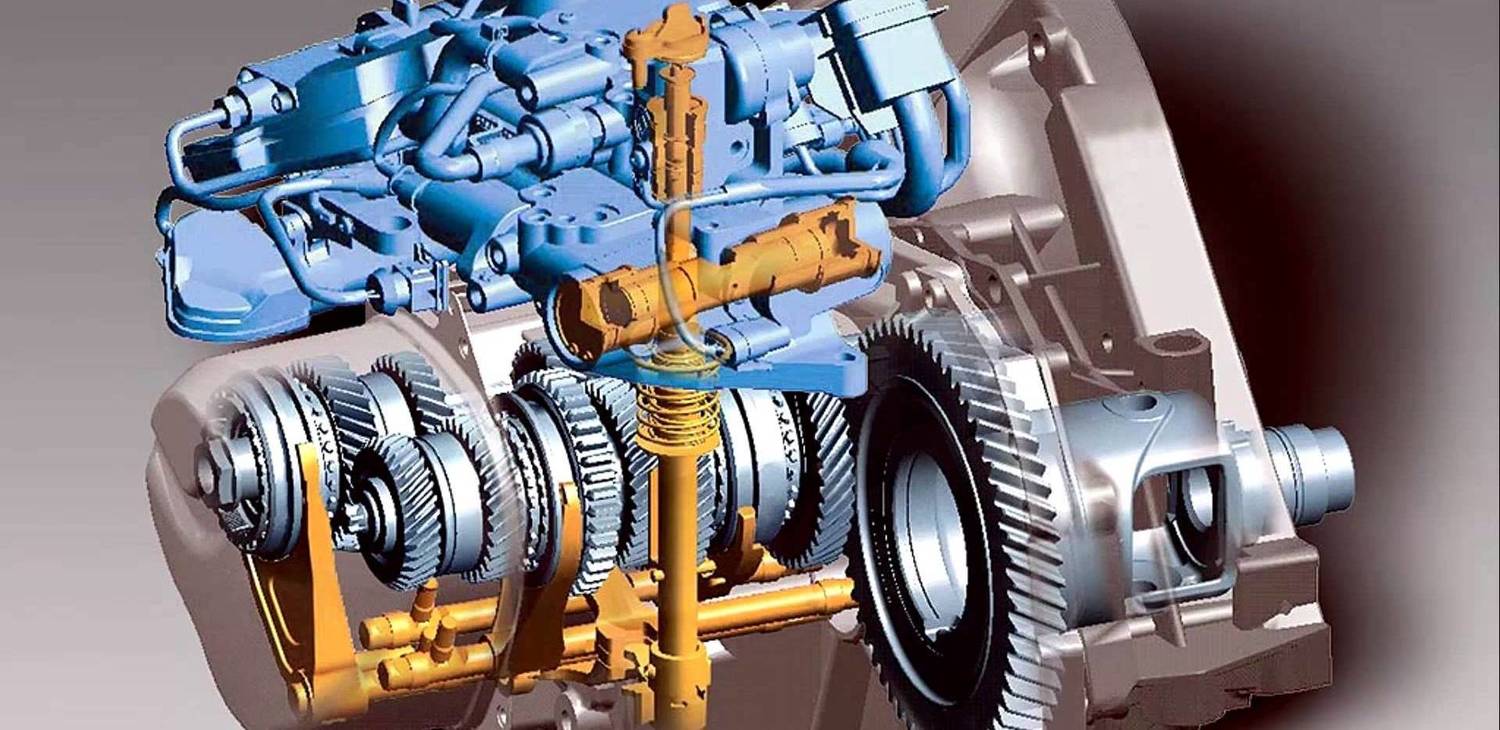
Схема роботизированной коробки передач
Роботизированные КПП различны по собственной конструкции, но можно отметить общие характерные черты этого новаторского устройства — МКПП с автоматической концепцией управления переключения скоростей.
В АКПП применяется фрикционное сцепление. Конструкция может предусматривать один фрикционный диск, но в некоторых случаях это может быть комплект, состоящий из нескольких. Новаторским в системе такой КППП можно считать двойное сцепление, гарантирующее передачу вращающего момента без прерывания потока мощности.
Принцип работы
В основе системы роботизированной КПП находится МКПП. В процессе производства применяются уже опробованные, испытанные конструкции. К примеру, коробка SMG от автопроизводителя BMW — это шестиступенчатая МКПП, управляемая электрогидроприводом.
Роботы могут располагать как электрическим, так и гидравлическим приводом переключения скоростей. В первом случае управляющими органами могут быть сервомеханизмы. Во втором — управление исполняется при помощи гидроцилиндров, управляемых при помощи электромагнитных клапанов. Этот вид привода принято называть электрогидравлическим.
В первом случае управляющими органами могут быть сервомеханизмы. Во втором — управление исполняется при помощи гидроцилиндров, управляемых при помощи электромагнитных клапанов. Этот вид привода принято называть электрогидравлическим.
В некоторых устройствах роботизированных коробок, управляющихся с помощью электрического привода, применяется специальная гидромеханическая конструкция, предназначение которой — перемещения основного цилиндра привода сцепления с помощью электродвигателя.
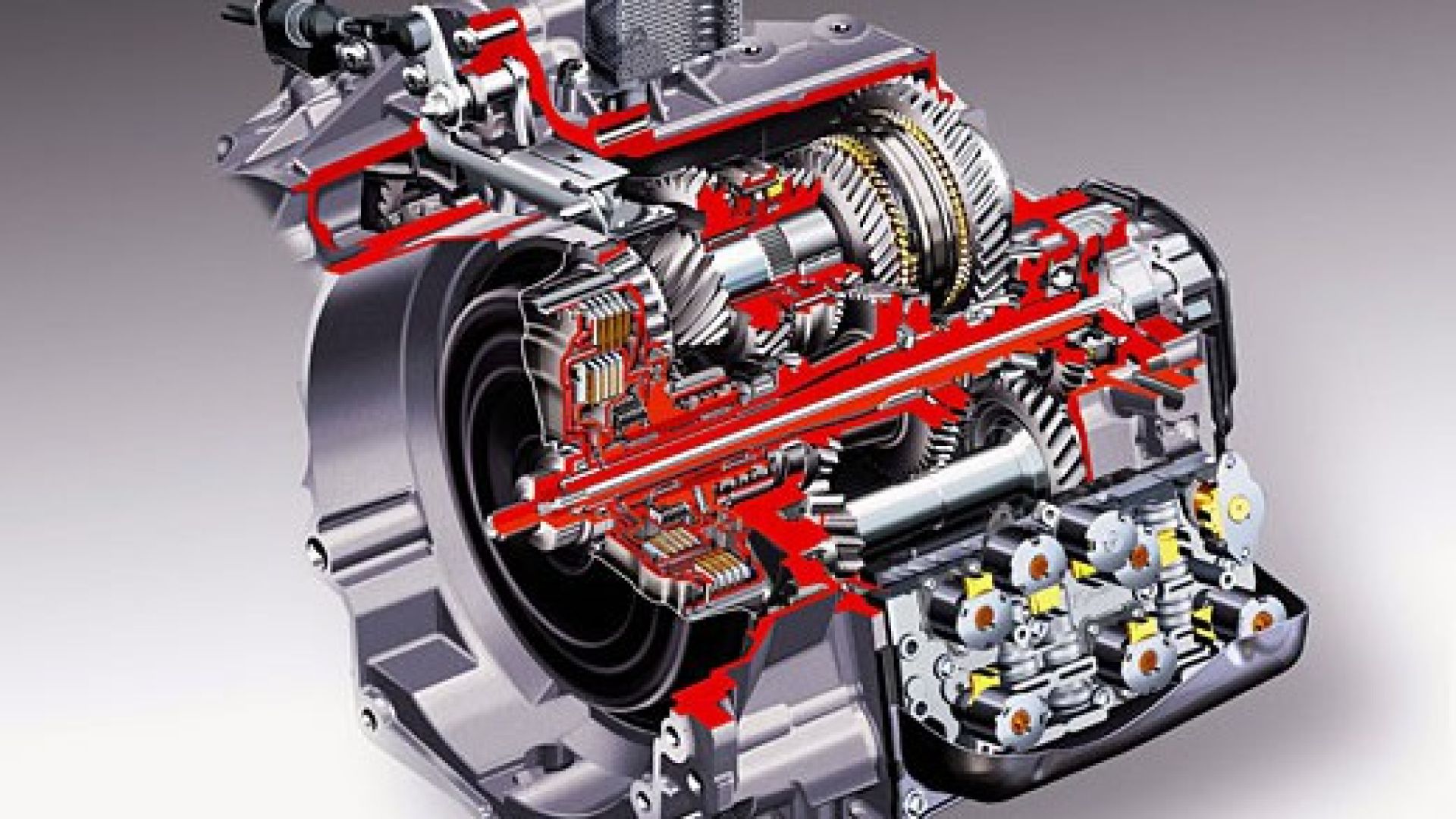
Принцип работы роботизированной коробки
Как и в любом механизме, в роботизированной коробке передач есть плюсы и минусы, которые мы постараемся раскрыть.
Плюсы
- Исключительная надёжность, потому что в основе этой коробки механика, которая опробована и испытана уже в течение многих лет.
- Высокая экономичность — приблизительно 30%.
- Увеличение ресурса двигателя.
- Для заправки требуется намного меньше масла: в 2 раза менее, чем в традиционной АКПП или вариаторе.
- Передач в роботизированной коробке столько же, сколько и в механической.
- Простота в ремонте.
- Высокий ресурс сцепления.

Минусы
- Невозможность изменения программы робота для изменения динамики или же перевода в режим экономии.
- Медленная скорость переключения передач, но это скорее вина установленного программного обеспечения.
- В случае отката с горки может разомкнуться сцепление.
- Во время переключения передач зачастую появляются заметные рывки.
- Во время езды в городских пробках, увеличивается износ сцепления и, как следствие, сокращение срока эксплуатации роботизированной коробки. Выход — переключение на ручное управление.
Как вы уже успели заметить, положительные и отрицательные стороны у роботизированной КПП сопоставимы. Если вы предпочитаете комфортную езду, то без раздумий останавливайтесь на роботизированной коробке. А если вы поклонник драйва и динамики, то вам однозначно нужна механическая. По сложившейся тенденции, авто с АКПП более предпочтительны женской частью автолюбителей. Однако эксперты в данной области заявляют, что коробка автомат не так проста, как может показаться на первый взгляд.
По сложившейся тенденции, авто с АКПП более предпочтительны женской частью автолюбителей. Однако эксперты в данной области заявляют, что коробка автомат не так проста, как может показаться на первый взгляд.
Видео «Езда на коробке-роботе»
В этом видео рассказано о роботизированной коробке передач, её достоинствах и недостатках.
Надеемся, что предложенный нами материал поможет вам определиться, покупать автомобиль с роботизированной коробкой или нет.
границ | Компактные редукторы для современной робототехники: обзор
Введение
Промышленные роботы составляют основу нескольких крупных традиционных производств, включая автомобилестроение и электронику. Сегодня многие регионы мира видят реальную возможность возродить обрабатывающую промышленность, внедряя роботов на малых и средних предприятиях (МСП) и в вспомогательные услуги, как правило, в здравоохранении (SPARC, 2015).
Для крупномасштабных промышленных сред с высокой степенью автоматизации преимущество роботизированных решений по сравнению с людьми-операторами в основном заключается в (i) большей доступности и (ii) способности перемещать — обычно большие — полезные грузы с исключительной точностью позиционирования и с высокой скоростью.Эти аспекты имеют решающее значение при разработке и выборе подходящих технологий для промышленного робота, особенно для первичных двигателей и трансмиссий, обеспечивающих движение этих устройств.
Применения в производстве и персональном обслуживании малых и средних предприятий бросают вызов этой традиционной парадигме робототехники. Ключ к успеху в этих новых приложениях лежит в очень высокой степени гибкости, необходимой для обеспечения безопасного и эффективного прямого сотрудничества с людьми для достижения общих целей.Эта цель требует, чтобы роботы сначала развили способность безопасно взаимодействовать с людьми в дисциплине, обычно называемой pHRI — физическое взаимодействие человека и робота.
pHRI оказывает широкое влияние на срабатывание роботов. Опыт, накопленный за последние десятилетия, в основном в области робототехники в сфере здравоохранения, показывает, что для безопасного и эффективного взаимодействия с людьми роботы должны в основном двигаться, как люди, и, следовательно, жертвовать некоторыми из своих традиционных преимуществ с точки зрения полезной нагрузки, точности и скорости.Эта ситуация привела к обширным исследованиям в последние годы, охватывающим оптимальный выбор первичных двигателей и передач для срабатывания HRI (Zinn et al., 2004; Ham et al., 2009; Iqbal et al., 2011; Veale and Xie, 2016). ; Verstraten et al., 2016; Groothuis et al., 2018; Saerens et al., 2019).
Эти работы относятся к более широкой области исследований, изучающих оптимизацию связи между первичным двигателем и коробкой передач для данной задачи в автоматических машинах. Краткий обзор основных разработок в этой области дает полезные сведения, позволяющие понять влияние коробки передач на общую производительность системы. Паш и Серинг (1983) определили важность инерции при срабатывании и предложили использовать передаточное число для согласования инерции двигателя и отраженной нагрузки в качестве средства минимизации потребления энергии для чисто инерционной нагрузки. Чен и Цай (1993) применили эту идею к области робототехники и определили результирующую способность к ускорению конечного эффектора как определяющий параметр. Ван де Стрете и др. (1998) разделили характеристики двигателя и нагрузки, чтобы распространить этот подход на общую нагрузку, и предоставили метод определения подходящих передаточных чисел для дискретного набора двигателей и редукторов.Roos et al. (2006) изучали выбор оптимального привода для трансмиссии электромобилей, добавляя вклад КПД коробки передач. Giberti et al. (2010) подтверждают инерцию ротора, передаточное отношение, эффективность коробки передач и инерцию коробки передач как наиболее важные параметры для выбора срабатывания и предлагают графический метод оптимизации этого выбора для динамической задачи.
Паш и Серинг (1983) определили важность инерции при срабатывании и предложили использовать передаточное число для согласования инерции двигателя и отраженной нагрузки в качестве средства минимизации потребления энергии для чисто инерционной нагрузки. Чен и Цай (1993) применили эту идею к области робототехники и определили результирующую способность к ускорению конечного эффектора как определяющий параметр. Ван де Стрете и др. (1998) разделили характеристики двигателя и нагрузки, чтобы распространить этот подход на общую нагрузку, и предоставили метод определения подходящих передаточных чисел для дискретного набора двигателей и редукторов.Roos et al. (2006) изучали выбор оптимального привода для трансмиссии электромобилей, добавляя вклад КПД коробки передач. Giberti et al. (2010) подтверждают инерцию ротора, передаточное отношение, эффективность коробки передач и инерцию коробки передач как наиболее важные параметры для выбора срабатывания и предлагают графический метод оптимизации этого выбора для динамической задачи. Петтерссон и Олвандер (2009) снова сосредоточились на промышленных роботах и представили метод, моделирующий коробку передач с упором на массу, инерцию и трение.Резазаде и Херст (2014) используют очень точную модель двигателя и включают фундаментальный критерий выбора полосы пропускания в дополнение к минимизации энергии. Дрессчер и др. (2016) исследуют влияние трения на планетарный редуктор, в котором кулоновское трение является доминирующим механизмом трения, и демонстрируют, как КПД редуктора обычно становится преобладающим над КПД двигателя при высоких передаточных числах.
Петтерссон и Олвандер (2009) снова сосредоточились на промышленных роботах и представили метод, моделирующий коробку передач с упором на массу, инерцию и трение.Резазаде и Херст (2014) используют очень точную модель двигателя и включают фундаментальный критерий выбора полосы пропускания в дополнение к минимизации энергии. Дрессчер и др. (2016) исследуют влияние трения на планетарный редуктор, в котором кулоновское трение является доминирующим механизмом трения, и демонстрируют, как КПД редуктора обычно становится преобладающим над КПД двигателя при высоких передаточных числах.
По сравнению с исходными моделями коробок передач, использовавшихся в этих работах, где коробки передач моделировались как идеальные передаточные числа, сложность моделей постепенно возрастала.Тем не менее, необходимо сделать важные — и нереалистичные — упрощения, чтобы добиться хорошей практической применимости этих методов. Таким образом, не учитываются такие важные эффекты, как жесткость на кручение и потерянное движение, а модели инерции и эффективности коробки передач сильно упрощены. Это оправданный подход для множества приложений, где упрощенные методы могут помочь инженерам выбрать подходящие трансмиссии. Однако в HRI эти свойства слишком важны для пригодности коробки передач, и их нельзя так сильно упростить.
Это оправданный подход для множества приложений, где упрощенные методы могут помочь инженерам выбрать подходящие трансмиссии. Однако в HRI эти свойства слишком важны для пригодности коробки передач, и их нельзя так сильно упростить.
Следовательно, необходим другой подход, чтобы предоставить полезные рекомендации по выбору коробки передач в HRI, избегая чрезмерной сложности задач оптимизации в этой области. Предоставление подробных сведений об эксплуатационных свойствах и характеристиках различных технологий редукторов для обоснованного выбора — еще один вариант, следуя традициям таких работ, как Schempf and Yoerger (1993) или Rosenbauer (1995). Следуя этому подходу, Siciliano et al. (2010), Ли (2014), Шейнман и др.(2016) и Pham and Ahn (2018) предоставляют интересные обзоры высокоточных редукторов для современной робототехники. Однако технологии не анализируются достаточно подробно, чтобы получить хорошее представление о сложных механизмах, в которых они влияют на выполнение роботизированной задачи.
Основная цель этого обзора, следовательно, состоит в том, чтобы дополнить эти работы подробным анализом основных принципов, сильных сторон и ограничений доступных технологий. Помимо возможности прогнозирования будущего технологий редукторов в робототехнике, этот подход может помочь неспециалистам по редукторам определить подходящие технологии компактных редукторов для многофакторных требований новых робототехнических приложений (López-García et al., 2018). Для специалистов по коробкам передач из других областей этот анализ может помочь им получить полезную информацию о конкретных потребностях приложений HRI.
Это исследование начинается с краткого описания основных требований к будущим роботизированным трансмиссиям, чтобы затем представить систему оценки, предназначенную для оценки пригодности и потенциала конкретной технологии коробок передач для этой области. Эта структура включает сильную перспективу pHRI и новый параметр — Latent Power Ratio — для оценки эффективности, присущей определенной топологии редуктора. Эта новая структура используется в первую очередь для обзора традиционных технологий редукторов, используемых в промышленных роботах, и новых технологий передачи, которые в настоящее время находятся в процессе выхода на рынок. Наконец, в конце документа приводится краткое изложение выводов, сделанных в результате этого обзора, вместе с нашими выводами и рекомендациями.
Эта новая структура используется в первую очередь для обзора традиционных технологий редукторов, используемых в промышленных роботах, и новых технологий передачи, которые в настоящее время находятся в процессе выхода на рынок. Наконец, в конце документа приводится краткое изложение выводов, сделанных в результате этого обзора, вместе с нашими выводами и рекомендациями.
Система оценки роботизированных трансмиссий с расширенными возможностями HRI
Контроль
Управление роботизированными устройствами — очень широкая и сложная тема, которая является предметом обширной исследовательской литературы.В этом разделе мы ограничимся введением основных принципов линейности и отраженной инерции, которые являются основными для понимания влияния редуктора на управление.
Хотя в целом скорость и точность являются противоречивыми требованиями, обычные роботизированные устройства превосходны в достижении высокой точности позиционирования на высокой скорости благодаря использованию жестких приводов с очень линейным поведением (Cetinkunt, 1991). Включение роботизированной трансмиссии влияет на сложность управления в основном двумя способами: вносит дополнительную нелинейность и сильно влияет на отраженную инерцию.
Включение роботизированной трансмиссии влияет на сложность управления в основном двумя способами: вносит дополнительную нелинейность и сильно влияет на отраженную инерцию.
Нелинейности, вызванные включением трансмиссии, принимают в основном форму люфта и / или трения и уменьшают полосу пропускания системы, создавая важные проблемы управления (Schempf, 1990). Заявление о зубчатых колесах приводит к люфту, трению и (нежелательному) соответствию, что затрудняет точное управление. (Hunter et al., 1991) сегодня так же актуально, как и почти 30 лет назад. Для некоторых технологий большие кинематические погрешности передачи и, в частности, нелинейное трение также могут вызывать значительные нелинейности.
Коробки передач также сильно влияют на отраженную инерцию системы. В роботизированном устройстве инерция первичного двигателя обычно на несколько порядков меньше, чем у полезной нагрузки, что делает систему нестабильной и создает серьезные проблемы с управлением. Добавление трансмиссии сильно снижает инерцию полезной нагрузки, которую видит первичный двигатель и которая отражается на него, на коэффициент, равный квадрату передаточного отношения трансмиссии. Таким образом, тщательный выбор трансмиссии может привести к более сбалансированной инерции на обеих сторонах трансмиссии, способствуя минимизации энергопотребления и созданию более надежной, стабильной и точной системы (Pasch and Seering, 1983).
Таким образом, тщательный выбор трансмиссии может привести к более сбалансированной инерции на обеих сторонах трансмиссии, способствуя минимизации энергопотребления и созданию более надежной, стабильной и точной системы (Pasch and Seering, 1983).
Отраженная инерция особенно важна, когда рабочие органы претерпевают быстрые и частые изменения скорости и / или крутящего момента, что очень часто встречается в задачах автоматизации и робототехники. В этих случаях вводится перспектива полосы пропускания, чтобы подтвердить способность системы отслеживать эти изменения (Sensinger, 2010; Rezazadeh and Hurst, 2014). Это лежит в основе принципа управляемости задним ходом, способности системы демонстрировать низкий механический импеданс, когда она приводится в действие с естественной выходной мощности (с обратным приводом).Это особенно важно при частом двунаправленном обмене энергией между роботом и его пользователем, что типично для реабилитационных устройств или экзоскелетов. Как демонстрируют Ван и Ким (2015), управляемость коробки передач задним ходом включает в себя комбинированный эффект отраженной инерции, отраженного демпфирования и кулоновского трения, и поэтому она тесно связана с эффективностью коробки передач.
Это подчеркивает важность для оценки управляющего воздействия определенной технологии коробки передач как ее передаточного отношения, так и нелинейностей (люфт, трение), которые она вносит.
Безопасность
Промышленные роботы традиционно размещаются за забором в хорошо структурированной среде, где они могут воспользоваться преимуществами своих быстрых и точных роботизированных движений, не подвергая опасности целостность человека-оператора.
Безопасный pHRI, включающий способность безопасно перемещаться в неструктурированной / неизвестной среде, обязательно тесно связан с управляемостью. Текущая стратегия, используемая робототехниками для достижения этой цели, состоит из формирования механического импеданса (Calanca et al., 2015), то есть позволяя контроллеру соответствия управлять сложным динамическим соотношением между положением / скоростью робота и внешними силами (Hogan, 1984).
Принцип прост: чтобы обеспечить хорошую адаптацию к неопределенной среде, а также целостность человека-оператора / пользователя во время взаимодействия с роботизированным устройством, последний должен двигаться согласованно, как человек (Karayiannidis et al. др., 2015). Это подчеркивает важность импеданса и внутреннего соответствия (De Santis et al., 2008) и объясняет появление нового типа внутренне гибких приводов для pHRI (Ham et al., 2009), где требуется высокая степень соответствия (Haddadin and Croft, 2016).
др., 2015). Это подчеркивает важность импеданса и внутреннего соответствия (De Santis et al., 2008) и объясняет появление нового типа внутренне гибких приводов для pHRI (Ham et al., 2009), где требуется высокая степень соответствия (Haddadin and Croft, 2016).
С точки зрения управления, инерция полезной нагрузки, отраженная к первичному двигателю, уменьшается на коэффициент, соответствующий квадрату передаточного числа. Таким же образом обычно небольшая инерция ротора первичного двигателя усиливается тем же фактором при отражении в сторону полезной нагрузки, который должен быть добавлен к инерции, возникающей в результате движения роботизированного устройства и груза по соображениям безопасности, а также ограничение рабочих скоростей.
Хотя в большинстве актуаторов pHRI сегодня используются редукторы с высоким передаточным числом, некоторые известные робототехники Seok et al. (2014), Сенсингер и др. (2011) видят большой потенциал робототехники в использовании двигателей с большим крутящим моментом (бегунок), требующих очень малых передаточных чисел.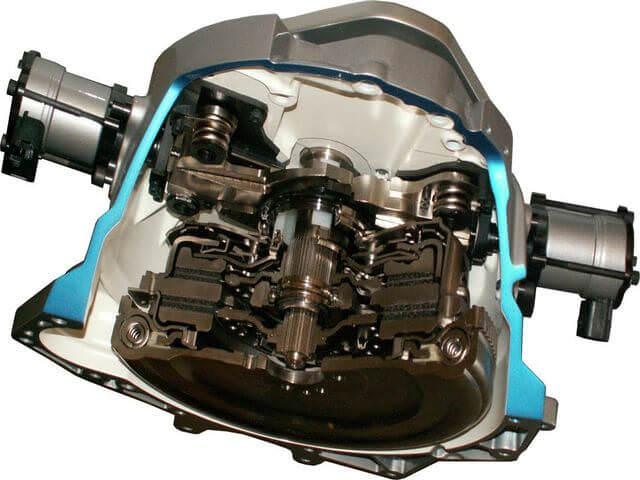 Новые производители робототехнических решений, такие как Genesis Robotics из Канады или Halodi Robotics AS из Норвегии, предлагают приводы для робототехники, основанные на этих принципах. По их мнению, увеличение инерции двигателя и уменьшение передаточного числа должно приводить к снижению инерции двигателя, отражаемой на рабочий орган, что позволяет повысить рабочие скорости и / или полезную нагрузку без ущерба для целостности оператора.Низкие передаточные числа также имеют дополнительное преимущество в пропускной способности: они имеют меньшее трение и люфт, уменьшая вклад нелинейностей от коробки передач. С другой стороны, умеренное передаточное число не может компенсировать нелинейные условия сцепления — обычно зубчатый момент (Siciliano et al., 2010).
Новые производители робототехнических решений, такие как Genesis Robotics из Канады или Halodi Robotics AS из Норвегии, предлагают приводы для робототехники, основанные на этих принципах. По их мнению, увеличение инерции двигателя и уменьшение передаточного числа должно приводить к снижению инерции двигателя, отражаемой на рабочий орган, что позволяет повысить рабочие скорости и / или полезную нагрузку без ущерба для целостности оператора.Низкие передаточные числа также имеют дополнительное преимущество в пропускной способности: они имеют меньшее трение и люфт, уменьшая вклад нелинейностей от коробки передач. С другой стороны, умеренное передаточное число не может компенсировать нелинейные условия сцепления — обычно зубчатый момент (Siciliano et al., 2010).
Более пристальный взгляд на спецификации этих новых двигателей вызывает некоторые вопросы с точки зрения достижимой эффективности, веса или компактности, а также последствий для оборудования, возникающих в результате чрезмерной тяги к высоким электрическим токам (HALODI Robotics, 2018; GENESIS Robotics, 2020).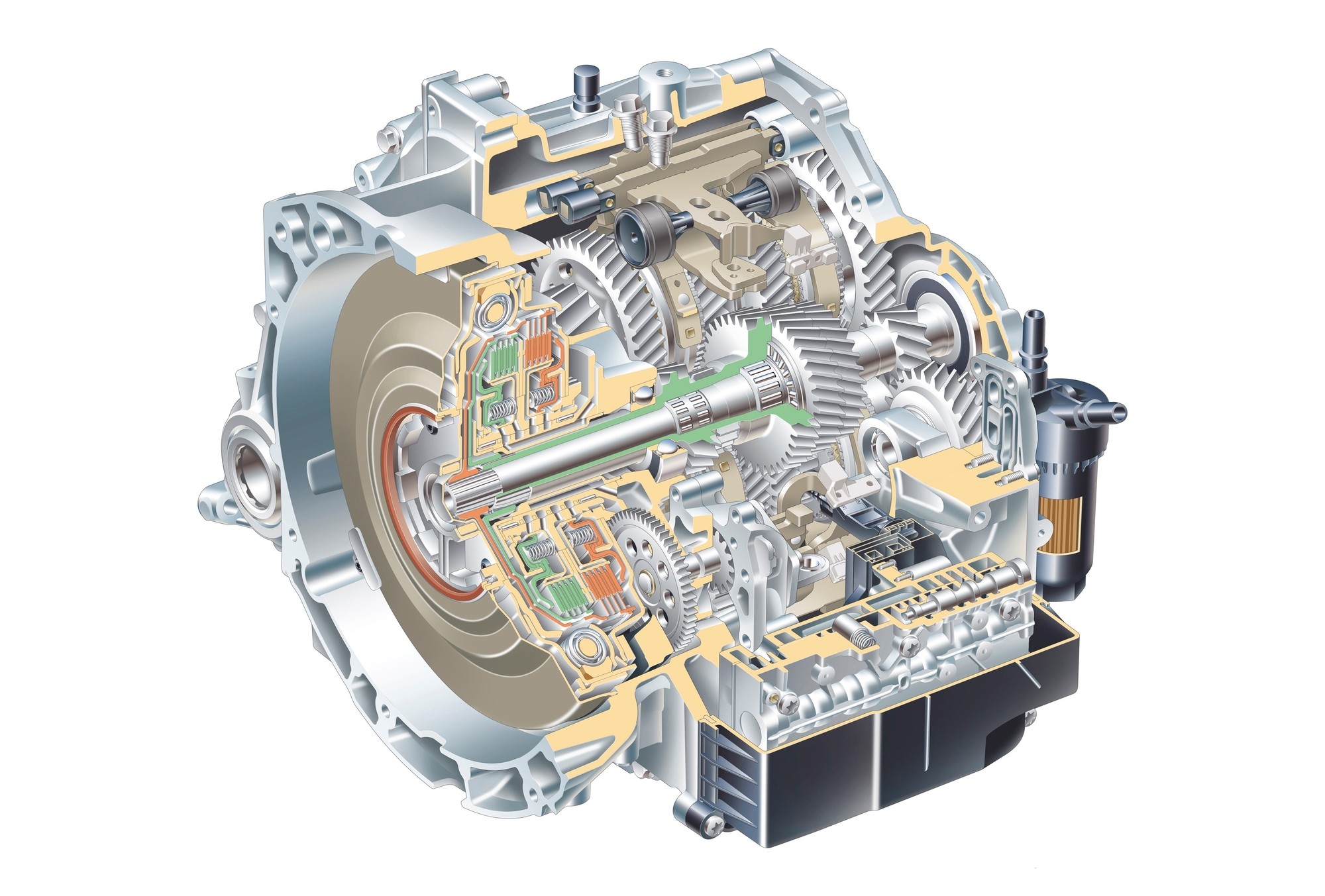
Подводя итог, нет полного согласия о том, как лучше всего подойти к безопасному срабатыванию для робототехники. Тем не менее, сильные естественные связи между безопасностью и управляемостью столь же очевидны, как и решающее значение передаточного числа трансмиссии и ее нелинейностей.
Вес и компактность
Облегченная конструкция имеет первостепенное значение для обеспечения совместимости безопасности и хорошей производительности в новых приложениях робототехники (Albu-Schäffer et al., 2008). Новейшие коллаборативные роботы (коботы), такие как облегченный робот KUKA, разработанный в сотрудничестве с Институтом робототехники и мехатроники Немецкого аэрокосмического центра (DLR), живут по этому принципу и, следовательно, сильно отличаются от тяжелых и громоздких традиционных промышленных роботов.Благодаря более низкой инерции, легкие коботы обеспечивают более высокую производительность — более высокие скорости — без ущерба для безопасности пользователя.
Этот выгодный аспект облегченной конструкции имеет и другие преимущества. Для мобильных робототехнических систем меньший вес означает большую автономность. В носимых вспомогательных роботизированных устройствах, включая протезы и экзоскелеты, легкий вес также является ключевым аспектом для повышения комфорта (Toxiri et al., 2019).
Высокая компактность — еще одна характеристика, присущая этим новым роботизированным устройствам: от коботов до вспомогательных устройств, компактность дает преимущества в маневренности и удобстве взаимодействия.
В роботизированных приложениях, предполагающих тесное сотрудничество с людьми или предоставление мобильных услуг, позиции по своей сути весьма неопределенны. Легкие и компактные конструкции особенно выгодны (Loughlin et al., 2007) для этих применений с двумя последствиями: первичные двигатели и трансмиссии — обычно самые тяжелые элементы в роботизированном устройстве — должны быть легкими и компактными, но легкие конструкции имеют тенденцию требуйте более низких крутящих моментов.
В отличие от веса коробки передач, определение подходящего критерия для оценки вклада коробки передач в компактность системы является более сложной задачей.Физический объем определенно играет роль, но наш опыт показывает, что фактическая форма коробки передач имеет тенденцию иметь большее влияние. Другой аспект, о котором стоит упомянуть, — это наличие в некоторых конфигурациях редукторов свободного пространства для размещения материала или движущихся частей, таких как электродвигатели или выходные подшипники, также могут представлять особый интерес. Поэтому мы решили включить в нашу схему оценки приблизительную форму (диаметр × длина) выбранной коробки передач, в то время как наличие дополнительного места можно напрямую оценить с помощью предоставленных цифр для каждой из конфигураций.
Эффективность и виртуальная мощность
КПД
В таких областях, как автомобильные или ветряные турбины, эффективность редукторов долгое время находилась в центре внимания. В робототехнике, с другой стороны, эффективность до недавнего времени не становилась ключевым параметром при выборе подходящей коробки передач (Arigoni et al., 2010; Dresscher et al., 2016).
Более высокая эффективность — более низкие потери — позволяют снизить потребление энергии и прямо положительно влияют как на эксплуатационные расходы, так и на воздействие машины или устройства на окружающую среду.Для мобильных и носимых роботизированных устройств повышение эффективности также помогает снизить вес системы — требуются батареи меньшего размера — и в конечном итоге приводит к большей автономности и лучшему удобству использования (Kashiri et al., 2018).
В коробках передач есть еще одно дополнительное преимущество в снижении потерь: большинство механических трансмиссий, используемых в робототехнике, имеют замкнутую форму и используют какой-либо контакт зубьев для передачи крутящего момента и движения между первичным двигателем и рабочим органом. Благодаря этому кинематическое соотношение между входной ω In и выходной скоростями ω Out заблокировано количеством зубцов и определяет его передаточное отношение i K .В коробке передач без потерь передаточное отношение i τ между выходным и входным крутящими моментами τ точно соответствует обратному кинематическому передаточному отношению с противоположным знаком. Но в реальной коробке передач наличие потерь изменяет это равенство, и, поскольку кинематическое передаточное число заблокировано числом зубцов, абсолютное значение передаточного числа должно уменьшаться пропорционально потерям:
ωInωOut = iK = — η iτ = -ητOutτIn; где η — КПД системы.
Следовательно, высокие потери в коробке передач означают, что меньший крутящий момент доступен для рабочего органа и требуются более высокие передаточные числа для достижения такого же усиления крутящего момента.
Коробки передач подвержены нескольким видам потерь. Чтобы классифицировать их, мы принимаем критерии, предложенные Talbot и Kahraman (2014), и разделяем их на зависимые от нагрузки (механические) потери мощности, возникающие из-за скольжения и качения контактных поверхностей, как в контактах шестерен, так и в подшипниках, и нагрузки -независимые (спиновые) потери мощности — возникают из-за взаимодействия вращающихся компонентов с воздухом, маслом или их смесью.
Виртуальная сила
Термин виртуальная мощность, насколько известно авторам, был первоначально введен Ченом и Анхелесом (2006), но это явление, объясняющее аномально высокие потери, присутствующие в некоторых планетных топологиях, долгое время было известно под разными названиями, включая Blindleistung (Wolf, 1958; Mueller, 1998) и скрытая или бесполезная мощность (Macmillan and Davies, 1965; Yu and Beachley, 1985; Pennestri and Freudenstein, 1993; Del Castillo, 2002).
Из-за своего принципа действия коробка передач всегда включает в себя высокоскоростную сторону с низким крутящим моментом и сторону с высоким крутящим моментом и низкой скоростью. Следовательно, его внутренние зубчатые зацепления обычно подвержены либо высокому крутящему моменту и низкой скорости, либо условиям высокой скорости и низкого крутящего момента. Однако в некоторых коробках передач из-за их особой топологии некоторые зацепления шестерен могут иметь одновременно высокую скорость и высокий крутящий момент. Зубчатые зацепления могут легко достичь КПД выше 98%, но поскольку генерируемые потери приблизительно пропорциональны произведению относительной скорости двух зубчатых элементов и крутящего момента, передаваемого через зацепление (Niemann et al., 1975), на этих высоконагруженных сетках появляются неожиданно большие потери. Виртуальная мощность обеспечивает основу для оценки вклада этого явления, которое в дальнейшем мы будем называть топологической эффективностью коробки передач.
Некоторые из вышеупомянутых авторов предлагают методы для оценки топологической эффективности данной конфигурации и определения ее влияния на общую эффективность системы. В рамках Chen and Angeles (2006) виртуальная мощность определяется как мощность, измеренная в движущейся — неинерциальной — системе отсчета.Скрытая мощность , представленная Ю и Бичли (1985), соответствует виртуальной мощности, когда система отсчета является несущим элементом коробки передач, тогда как виртуальная мощность — это соотношение между виртуальной мощностью и мощностью, генерируемой внешним крутящим моментом. применяется по ссылке. Используя эти элементы, мы определяем Latent Power Ratio топологии коробки передач как отношение суммы скрытых мощностей во всех зацеплениях к мощности, потребляемой коробкой передач.Таким образом, большой коэффициент скрытой мощности соответствует низкой топологической эффективности и указывает на сильную тенденцию к возникновению больших потерь за счет зацепления.
Чтобы облегчить понимание практического влияния на общую эффективность топологической эффективности, характеризующейся скрытым коэффициентом мощности, данной конфигурации редуктора, мы используем на этом этапе уравнения, предложенные Макмилланом и Дэвисом (1965) для расчета упрощенный пример.
Полная коробка передач робототехники обычно включает в себя несколько зацепляющих контактов, каждый из которых имеет разные рабочие условия и параметры, что приводит к различной эффективности зацепления.Эти КПД очень высоки в оптимизированных зубчатых зацеплениях — часто выше 99% — и позволяют упростить наши расчеты, учитывая общую уникальную эффективность зацепления η м = 99% во всех зацепляющих контактах в нашем редукторе.
Во-первых, эталонный редуктор, идеальный с точки зрения топологической эффективности, имел бы только одно зацепление и коэффициент скрытой мощности L = 1. Таким образом, потери мощности внутри этого эталонного редуктора можно легко рассчитать как функцию входной мощности. как:
Таким образом, общая эффективность зацепления всего редуктора соответствует КПД одиночного зацепляющего контакта:
ηsys, идеально = PIN-PLossPIN = ηm = 99%;
Неидеальный редуктор с таким же типовым η m во всех его зацеплениях и со скрытым коэффициентом мощности L, характеризующим его топологический КПД, указывает на то, что общие потери в редукторе можно приблизительно оценить следующим образом:
Ploss, L≈ PIN * L * (1-ηm)
И общая эффективность зацепления всей коробки передач теперь составляет:
ηsys, L = PIN-PLoss, LPIN≈L * ηm + (1-L)
Что для η м = 99% и для значения L = 50 дает:
Этот результат следует частично релятивизировать, потому что накопленные потери в первых зацеплениях, задействованных вдоль различных внутренних потоков мощности в коробке передач, делают меньшую виртуальную мощность, предсказываемую этими уравнениями, которая будет проходить через последующие зацепления.Эффект от этого состоит в том, что КПД обычно будет падать немного медленнее с коэффициентом скрытой мощности, а более реалистичное значение для предыдущего расчета обычно будет между 55 и 60%.
Чтобы частично компенсировать это большое влияние топологической эффективности на общую эффективность, конфигурации с большим скрытым коэффициентом мощности требуют чрезвычайно высокой эффективности зацепления: для достижения эффективности системы> 70% системе с L = 100 требуется средняя эффективность зацепления. выше 99.5%.
Поэтому в нашем дальнейшем анализе мы сосредоточимся только на оценке вклада топологической эффективности в эффективность коробки передач. Это позволяет нам использовать упрощенный метод для расчета коэффициента скрытой мощности, который, в первую очередь, не учитывает влияние на потери, вызванные уменьшением крутящего момента. Соответствующие расчеты, использованные для определения коэффициента скрытой мощности различных конфигураций редукторов, проанализированных в этой работе, включены в Приложение I.
Подводя итог, чтобы охарактеризовать важный эффект КПД коробки передач, мы оценим порядок величины трех параметров: (i) потери, зависящие от нагрузки, (ii) пусковой момент без нагрузки и (iii) коэффициент скрытой мощности.Хотя на него дополнительно влияет статическое трение, а не только кулоновское и вязкое трение, мы выбрали пусковой крутящий момент без нагрузки (относительно номинального крутящего момента) в качестве практического способа характеристики потерь, не зависящих от нагрузки. Наши обмены с производителями редукторов показывают, что это обычная практика, она не зависит от входной мощности и легко доступна в технических данных производителя.
Производительность
По сравнению со специальными машинами и машинами для автоматической сборки промышленные роботы не могут достичь тех же стандартов точности и скорости.Оба аспекта пришлось скомпрометировать, чтобы обеспечить большую степень гибкости и мобильности, а также рабочего пространства (Rosenbauer, 1995). С этой точки зрения HRI — это всего лишь еще один шаг в том же направлении: чтобы соответствовать дальнейшим потребностям гибкости и мобильности в неструктурированной среде, необходимы дополнительные компромиссы с точки зрения точности и скорости. Этот переход отражен на Рисунке 1.
Рисунок 1 . Графическое описание перехода основных задач задач от машин через промышленных роботов и коботов к людям-операторам.
Точность и повторяемость
Множество аспектов редуктора влияют на общую точность полного роботизированного устройства. Эти аспекты долгое время находились в центре внимания традиционной робототехники и сегодня хорошо изучены, так как работы, подобные работам Майра (1989), Шемпфа и Йоргера (1993) или Розенбауэра (1995), содержат очень хорошие ссылки для понимания этих сложных влияний. Эти исследования выявили особенно важную роль, которую играет потеря хода и жесткость на кручение.
Lost Motion — это дальнейшее развитие принципа люфта, который описывает полное вращательное смещение, создаваемое приложением ± 3% от номинального входного крутящего момента.
Жесткость на кручение характеризует податливость на кручение всех элементов коробки передач, задействованных во всем потоке сил, под действием внешнего крутящего момента. Это достигается путем блокировки входа редуктора и постепенного увеличения крутящего момента, прилагаемого на выходе, при этом регистрируются изменения жесткости на кручение, приводящие к отклонениям от идеально линейного поведения.
По своей природе точные — малые потери хода и линейная высокая жесткость на кручение — редукторы упрощают задачу управления и обеспечивают высокую точность, идеально подходят для управления положением, в то время как менее точные редукторы создают более серьезные проблемы для управления положением и могут использоваться для более гибкого срабатывания. . В технологиях редукторов, где скорость оказывает сильное влияние на потери или с особенно нелинейным трением, также необходимо учитывать вклад этих элементов в точность.
Чтобы охарактеризовать возможности точности, наша конструкция включает потерю движения и жесткость на кручение, а также субъективную оценку изменения эффективности, вызванного изменениями скорости / крутящего момента.
Скорость и полезная нагрузка
Промышленные роботы могут обрабатывать большие полезные нагрузки за счет большой инерции. Для коботов, с другой стороны, соображения безопасности подразумевают, что они не должны обрабатывать такие большие полезные нагрузки, но благодаря более легкой конструкции они действительно могут достичь большего отношения полезной нагрузки к массе.
Соображения безопасности также ограничивают степень, в которой это снижение массы может быть использовано для увеличения рабочих скоростей (Haddadin et al., 2009). Тем не менее, более низкий крутящий момент способствует использованию более легких и быстрых электродвигателей, что в принципе требует более высоких передаточных чисел для этих приложений.
Критерий для характеристики вклада коробки передач в скорость и характеристики полезной нагрузки должен отражать эти аспекты и побуждать нас использовать в нашей структуре (i) максимальную входную скорость, (ii) максимальный повторяемый выходной крутящий момент, называемый моментом ускорения, и номинальный крутящий момент, (iii) ) передаточное число и (iv) отношение крутящего момента к массе как для номинального, так и для момента ускорения.
Сводка
Определение характеристик роботизированных коробок передач — сложная задача: высокая универсальность этих устройств и их сложное взаимодействие с первичными двигателями и системами управления делают прямое сравнение их характеристик особенно сложным.
Передаточное число продемонстрировало сильное влияние на производительность робототехнической системы. Это объясняет его предпочтительную роль в литературе, посвященной оптимизации срабатывания роботов, и растущий интерес робототехников к возможностям использования переменных передач (Kim et al., 2002; Карбон и др., 2004; Stramigioli et al., 2008; Жирар и Асада, 2017). Хотя мы убеждены, что трансмиссии с регулируемой передачей являются очень многообещающими и определенно будут способствовать формированию будущего ландшафта робототехники, мы ограничили наш анализ здесь компактными коробками передач с постоянным передаточным числом. На данный момент мы считаем, что нам лучше всего подойдет этот ограниченный объем, который на самом деле может также способствовать выявлению потенциальных областей применения и подходящих технологий для трансмиссий с переменным передаточным числом.
На основе этого анализа мы предлагаем схему оценки будущих роботизированных коробок передач на основе следующих параметров:
• Передаточное число
• Ускорение и номинальный выходной крутящий момент
• Вес
• Форма: диаметр × длина
• Ускорение и номинальный крутящий момент к массе
• КПД: пиковое значение и субъективная зависимость от скорости и крутящего момента
• Топологическая эффективность: коэффициент скрытой мощности
• Пусковой крутящий момент при прямом и обратном движении холостого хода в% от номинального входного крутящего момента
• Потери, не зависящие от нагрузки
• Потерянное движение
• Максимальная входная скорость
• Жесткость на кручение
Наша структура включает также эталонный вариант использования, характерный для множества задач pHRI согласно нашему собственному опыту: моменты ускорения более 100 Нм и передаточные числа более 1: 100, для которых необходимо оптимизировать вес, компактность и эффективность.
Обзор технологий передачи данных, используемых в настоящее время в промышленных роботах
Электродвигатели, оснащенные механическими трансмиссиями, обычно используются в качестве исполнительных механизмов в робототехнике (Rosenbauer, 1995; Scheinman et al., 2016), а также в промышленных роботах. Эти механические трансмиссии почти неизбежно основаны на какой-то зубчатой передаче (Sensinger, 2013).
Благодаря их большей способности снижать общий вес и поскольку электродвигатели имеют тенденцию иметь более высокий КПД на высоких рабочих скоростях, другой характеристикой промышленных роботизированных трансмиссий является использование относительно больших коэффициентов передачи (передаточных чисел), обычно более 1:40 (Розенбауэр, 1995).
Планетарные редукторы
: чрезвычайно универсальная платформа
Планетарные зубчатые передачи
(PGT) — это компактные, универсальные устройства, широко используемые в силовых передачах. Благодаря характерной коаксиальной конфигурации и хорошей удельной мощности они особенно подходят для вращающихся первичных двигателей, таких как электродвигатели.
PGT
могут использовать две дифференцированные стратегии для достижения высоких коэффициентов усиления: (i) добавление нескольких ступеней обычных высокоэффективных PGT — здесь называемых редукторами и представленных на рисунке 2 — или (ii) использование особенно компактных конфигураций PGT с возможностью получения высоких передаточные числа.
Рисунок 2 . Внутреннее устройство редуктора Neugart с указанием его основных элементов, адаптировано из Neugart (2020) с разрешения © Neugart GmbH. Он также включает схему базовой топологии.
Хотя использование нескольких ступеней редукторов позволяет наилучшим образом использовать эффективность зацепления высоких шестерен и приводит к высокоэффективным редукторам, это обычно приводит к тяжелым и громоздким решениям. Компактные конфигурации PGT с другой стороны могут достигать высоких передаточных чисел в очень компактных формах, но они страдают от удивительно высоких потерь, связанных с высокими виртуальными мощностями (Crispel et al., 2018).
Особенно компактная конфигурация PGT для высоких передаточных чисел была впервые изобретена Вольфромом (1912) и использовалась в редукторах серии RE компании ZF Friedrichshafen AG (ZF), предназначенных для промышленных роботов (Looman, 1996). Эта конфигурация, показанная на Рисунке 3, сильно зависит от Virtual Power, и ZF представляет собой единственное известное коммерческое применение конфигураций PGT, отличное от обычных редукторов. Хотя производство серии RE было прекращено в 90-х годах, Wolfrom PGT в последнее время пользуются растущим интересом сообщества исследователей робототехники, как мы резюмировали в предыдущей статье авторов (López-García et al., 2019а).
Рисунок 3 . Внутреннее устройство ZF серии RG Wolfrom PGT для роботизированных приложений адаптировано из Looman (1996) с разрешения © 1998 Springer-Verlag Berlin Heidelberg. Он также включает схему базовой топологии.
Таблица 1 представляет оценку PGT. Несмотря на завышенные размеры для нашего теста, мы использовали ZF RG350 Wolfrom PGT, чтобы попытаться оценить потенциал конфигураций PGT с высоким коэффициентом, основываясь на имеющихся доказательствах его пригодности для достижения высоких коэффициентов (Арнаудов и Караиванов, 2005; Mulzer, 2010 ; Капелевич и AKGears LLC, 2013).Для редукторов мы выбрали — при поддержке производителей — подходящие решения из портфолио Wittenstein и Neugart. Стоит отметить важную роль, которую играет максимальное передаточное число на ступень в редукторе: в то время как Виттенштейн ближе к максимуму осуществимости, определяемому избеганием контакта между соседними планетами, Нейгарт выбирает в своей серии PLE (серия PLFE может достигать 1: 100 соотношений только в два этапа) более ограничительный подход и, следовательно, для достижения общего усиления 1: 100 требуется три этапа вместо двух для Виттенштейна.Это приводит к менее компактным решениям и более низкой эффективности для приложения 1: 100, но позволяет Neugart достичь более высокого выигрыша — до 1: 512 — без фундаментальных изменений в весе, размере или эффективности.
Таблица 1 . Схема оценки решений с планетарной зубчатой передачей.
Редукторы
имеют вес около 4 кг, что нельзя напрямую сравнивать с увеличенными размерами RG350. RG350 имеет форму с большим диаметром и меньшей длиной, чем редукторы.Что касается отношения крутящего момента к весу, значения обоих решений кажутся относительно близкими.
Редукторы
имеют сильное преимущество в их хорошем КПД (выше 90%), который также менее чувствителен к изменениям рабочих условий, а пусковые моменты холостого хода очень низкие. Конфигурации с высоким коэффициентом полезного действия показывают, насколько сильно ограничивается топологическая эффективность, что приводит к снижению эффективности. Это, вероятно, объясняет, почему редукторы сегодня являются доминирующей технологией PGT в робототехнике.
PGT
показывают самые высокие входные скорости (до 8 500 об / мин), но их потери хода также самые большие (4–6 Arcmin) в обычных редукторах. В робототехнике PGT широко использовались в первых промышленных роботах, в то время как в последние десятилетия их использование сильно сократилось, в основном из-за их ограничений, связанных с уменьшением люфта. Несмотря на то, что существуют механизмы, ограничивающие изначально более значительную обратную реакцию PGT, на практике они основаны на введении определенной предварительной нагрузки, отрицательно влияющей на их эффективность (Schempf, 1990).
Гармонические приводы: без люфта, легкий редуктор деформационной волны
Редуктор Strain Wave был изобретен Массером (1955) и нашел широкое применение в 70-х годах, первоначально в аэрокосмической отрасли. Его основное космическое применение было в качестве элемента механической передачи в аппарате лунохода Аполлона 15 в 1971 году (Schafer et al., 2005).
Его название происходит от характерной деформации Flexspline , нежесткой, тонкой цилиндрической чашки с зубьями, которая служит выходом.Flexspline входит в зацепление с неподвижным сплошным круглым кольцом с внутренними зубьями шестерни Circular Spline , в то время как он деформируется вращающейся эллиптической заглушкой — волновым генератором , как это видно на рисунке 4. Этот тип редуктора является наиболее распространенным. обычно называют Harmonic Drive © (HD) из-за очень эффективной стратегии защиты IP.
Рисунок 4 . Внутренняя конфигурация коробки передач Harmonic Drive CSG (слева), адаптированная из Harmonic Drive (2014) с разрешения © 2019 Harmonic Drive SE, и коробка передач E-Cyclo (справа), адаптированная из SUMITOMO (2020) с разрешения © Sumitomo Drive, 2020 Germany GmbH.Также включена схема лежащей в основе топологии KHV, используемой для расчета его скрытого коэффициента мощности в Приложении I.
Для нашего сравнительного анализа мы выбрали два подходящих редуктора Harmonic Drive, CSD-25-2A, предназначенный для интеграции в роботизированное соединение, чтобы обеспечить соответствующие структурные граничные условия, и сверхлегкий редуктор CSG-25-LW, представляющий конструктивно достаточное решение. что может быть более прямо по сравнению с другими технологиями. Совсем недавно компания SUMITOMO представила новую коробку передач E-CYCLO, работающую также на принципе действия волны деформации.SUMITOMO предоставила нам доступ к своему самому последнему каталогу (SUMITOMO, 2020), что позволило нам включить его в наш тест (Таблица 2). Еще одна интересная волна деформации, очень похожая на гармонический привод, недавно была также представлена GAM в своей серии коробок передач для робототехники, которая также включает планетарные зубчатые передачи и циклоидные приводы (GAM, 2020).
Таблица 2 . Схема оценки решений волн деформации.
Выбранная модель CSG имеет значительно больший крутящий момент, чем предполагалось в нашем тесте.Форма имеет больший диаметр, чем длина, а вес значительно ниже, чем у других технологий, и приводит к лучшему соотношению крутящего момента к массе из проанализированных технологий. Действительно, характерное зацепление с несколькими зубьями обеспечивает большее сопротивление крутящему моменту, чем в PGT, что делает эту технологию очень подходящей для соединений, расположенных ближе к рабочему органу, где они часто встречаются в современных промышленных роботах.
Пиковый КПД ниже, чем у редукторов, и ближе к RG350, а КПД особенно чувствителен к условиям эксплуатации.Поезда Strain Wave демонстрируют большие потери, не зависящие от нагрузки, и пусковые моменты без нагрузки, особенно в условиях обратного движения, которые становятся особенно критическими для высоких скоростей и / или низких крутящих моментов (Harmonic Drive, 2014). Для роботизированных устройств HRI, подверженных частым изменениям скорости и полезной нагрузки в сочетании с обменом энергией между роботизированным устройством и пользователем, это означает, что средняя эффективность быстро падает ниже 40–50% (López-García et al., 2019b). Также стоит отметить их большой коэффициент скрытой мощности, указывающий на одновременное присутствие высоких крутящих моментов и скоростей в зацеплении зубьев, что также помогает объяснить относительно низкий КПД.
Еще раз, благодаря зацеплению с несколькими зубьями, можно достичь потерянных движений ниже 1 угловой минуты, что дает этому редуктору большое преимущество, которое помогает гармоническим приводам находить широкое применение в промышленных роботах. Они смогли вытеснить PGT из многих приложений, особенно после значительного улучшения характеристик в результате новой геометрии зубьев, представленной этой компанией в 90-х годах, что также улучшило линейность их жесткости (Slatter, 2000).
Максимальная входная скорость раньше была сильным ограничением для использования редукторов HD (Schempf, 1990), но новые достижения и улучшения конструкции позволяют им теперь достигать 7500 об / мин.
Циклоидные приводы: для высокой прочности и жесткости на кручение
С момента своего изобретения Лоренцем Брареном в 1927 году (Li, 2014) циклоидные приводы нашли применение в основном в лодках, подъемных кранах и некотором крупном оборудовании, таком как прокатные станы или станки с ЧПУ. В циклоидных приводах эксцентричное входное движение создает шаткое циклоидальное движение одиночного большого планетарного колеса, которое затем преобразуется обратно во вращение выходного вала и приводит к высокой редукционной способности (Gorla et al., 2008), см. Рисунок 5.
Рисунок 5 . Внутренняя конфигурация циклоидных приводов SUMITOMO Fine Cyclo F2C-A15 и Fine Cyclo F2C-T155, идентифицирующая их основные элементы, адаптирована из SUMITOMO (2017) с разрешения © Sumitomo Cyclo Drive Germany GmbH, 2017. Он также включает схему лежащих в основе топологий.
Таблица 3 включает лидера рынка (NABTESCO RV) в этом сегменте и основных претендентов (SPINEA и SUMITOMO). RV от NABTESCO и серия Fine-Cyclo T от SUMITOMO включают в себя обычную ступень PGT с предварительным зацеплением.Полезная нагрузка этих устройств больше, чем требуется для нашего теста, и приводит к большому весу. Это уже дает ценную информацию: более компактные решения недоступны на рынке и, согласно информации, предоставленной некоторыми производителями, менее интересны, поскольку для них потребуется высочайшая точность производства и, в конечном итоге, приведет к высокой стоимости.
Таблица 3 . Схема оценки решений для циклоидных приводов.
Формы аналогичны коробкам передач с волновой деформацией, а вес больше и ближе к весам PGT по вышеупомянутым причинам.Отношение крутящего момента к массе больше, чем у PGT, но немного ниже, чем у редукторов с волновой деформацией. Основное преимущество циклоидных приводов заключается именно в их способности выдерживать большие нагрузки и особенно ударные нагрузки, а также в минимальных затратах на техническое обслуживание.
Пиковый КПД выше, чем у редукторов с волновой деформацией, и ближе к КПД PGT, но КПД сильно зависит от условий эксплуатации (Mihailidis et al., 2014), а пусковые моменты холостого хода и скрытая мощность высокие, аналогично редукторам с волновой деформацией.
Хотя они, как правило, имеют некоторый люфт, который часто компенсируется в их конструкции для достижения уровней, сопоставимых с уровнями редукторов с волновой деформацией, вероятно, за счет немного более высокого трения. Их жесткость на кручение — самая большая из проанализированных технологий редукторов.
Приводы
Cycloid имеют неотъемлемое ограничение на работу с высокими входными скоростями, вызванное наличием большого и относительно тяжелого планетарного (кулачкового) колеса, что приводит к большим инерциям и дисбалансу.Это мотивирует использование, как правило, двух планетарных колес, расположенных последовательно и смещенных на 180 градусов друг к другу, для устранения дисбаланса, уменьшения вибраций и увеличения входной скорости. Это объясняет, как благодаря сочетанию циклоидных приводов со ступенями предварительного зацепления, состоящими из обычных ступеней PGT, циклоидные приводы получили широкое распространение в робототехнике. Такое расположение повышает эффективность, снижает чувствительность к высоким входным скоростям и обеспечивает легкую адаптацию их передаточных чисел.В 90-х годах гармонические приводы доминировали на рынке роботизированных коробок передач, но усовершенствования циклоидной технологии позволили циклоидным двигателям начать покорять бездорожье, сначала в Японии, а затем в других местах (Rosenbauer, 1995). В настоящее время производители, такие как NABTESCO, SUMITOMO или NIDEC, предлагают циклоидные гибриды с интегрированным передаточным механизмом PGT, покрывающие более 60% рынка роботизированных коробок передач, и поэтому стали новой доминирующей технологией, особенно для проксимальных суставов, подверженных более высоким нагрузкам и меньшим ограничениям по весу (WinterGreen Исследования, 2018).
Наконец, стоит упомянуть наличие относительно большой пульсации крутящего момента, которая вносит нелинейности и усложняет их контроль. Эта пульсация крутящего момента связана с необходимостью использования циклоидных профилей зубьев, чтобы избежать столкновения зубьев между большим планетарным колесом (-ами) и зубчатым венцом, что делает эти устройства чрезвычайно чувствительными к изменениям межцентрового расстояния, возникающим даже из-за небольших производственных ошибок. Существует несколько попыток улучшить эту ситуацию, используя эвольвентные зубья, менее чувствительные к изменениям межцентрового расстояния, с уменьшенными углами давления и / или коэффициентами контакта для минимизации радиальных сил и повышения эффективности (Морозуми, 1970), а также с использованием других форм нестандартных зубьев. -инволютные зубы (Коряков-Савойский и др., 1996; Хлебаня, Куловец, 2015).
Обзор новейших технологий передачи для робототехники
Усилитель крутящего момента REFLEX
Genesis Robotics привлекла большое внимание в сообществе робототехники с появлением их двигателя с прямым приводом, LiveDrive © . Согласно Genesis, LiveDrive в двух доступных топологиях — радиальном и осевом потоках — обеспечивает сравнительные характеристики в соотношении крутящего момента к массе. Двигатель с осевым потоком может достигать 15 Нм / кг, в то время как радиальный поток ограничивается максимум 10 Нм / кг.
Чтобы расширить спектр применения, Genesis Robotics представила совместимую коробку передач под названием Reflex , показанную на рисунке 6. Эта литая под давлением сверхлегкая пластиковая коробка передач предназначена для легких роботов, и хотя изначально она была разработана для совместной работы с LiveDrive. и поэтому он нацелен на передаточные числа ниже 1:30, он также способен обеспечивать передаточные числа до 1: 400 (GENESIS, 2018).
Рисунок 6 . Внутренняя конфигурация и основные элементы редуктора Reflex адаптированы из GENESIS Robotics (2020) с разрешения © 2019 Genesis Robotics.Он также включает схему базовой топологии.
Базовая топология — топология Wolfrom PGT с несколькими меньшими планетами (Klassen, 2019), в которой реактивное (неподвижное) зубчатое колесо разделено на две части для балансировки в соответствии с конструкцией, первоначально предложенной Россманом (1934) и используемой в качестве хорошо в передаче Hi-Red Tomcyk (2000).
В редукторе Reflex выходное кольцо также разделено для облегчения сборки с косозубыми зубьями. Еще одним интересным аспектом этой конструкции является заклеенная лентой форма планет, которая, как подозревают авторы, связана с возможностью предварительной нагрузки системы для достижения нулевого люфта, который, как утверждает Genesis, возможен с этой коробкой передач.По заявлению компании, гибкость пластиковых планетарных колес также дает преимущество в уменьшении люфта.
К сожалению, пока нет независимых тестов, подтверждающих данные характеристики, и никаких официальных данных, особенно по эффективности, от Genesis пока нет, поэтому в Таблицу 4 включено только значение Latent Power Ratio, полученное на основе его топологии.
Таблица 4 . Схема оценки новых технологий редукторов.
Таким образом, хотя лежащая в основе топология Wolfrom указывает на то, что эффективность, безусловно, будет сложной задачей, эта инновационная коробка передач демонстрирует большой потенциал, доступный для переосмысления существующих технологий и их адаптации к будущим потребностям робототехники. Genesis Robotics недавно вступила в интересное партнерство с известными промышленными компаниями, такими как Koch Industries Inc. и Demaurex AG.
Проезд Архимеда
IMSystems из Нидерландов является дочерним предприятием Делфтского технологического университета, созданного в 2016 году для использования изобретения Archimedes Drive (Schorsch, 2014).
Привод Архимеда снова повторяет топологию редуктора Wolfrom (также с разрезным реактивным зубчатым венцом в некоторых его конструкциях), но включает в себя революционное новшество в использовании роликов вместо зубчатых колес для замены зубчатых контактов контактами качения, см. Рисунок 7. Контролируемая деформация планетарных роликов позволяет передавать крутящий момент между планетами аналогично колесам транспортного средства.
Рисунок 7 . Внутренняя конфигурация привода Архимеда с деталями, показывающими его планеты Flexroller, адаптирована из IMSystems (2019) с разрешения © 2019 Innovative Mechatronic Systems B.V., со схемой лежащей в основе топологии.
Характеристики, представленные в таблице 4, взятой из брошюры компании (IMSystems, 2019) и доступной по запросу, показывают, что использование топологии Wolfrom дает этому устройству возможность достигать очень высоких передаточных чисел в компактной форме, но это также приводит к низкой топологической эффективности. Согласно IMSystems, замена контакта зубьев шестерни на контакт качения способствует минимизации контактных потерь, которые, в частности, при передаче крутящего момента между планетарной передачей и кольцевыми роликами должны компенсировать высокое латентное соотношение мощности и приводить к максимальному КПД. около 80% (IMSystems, 2019).Никаких данных о пусковых моментах или потерях, не зависящих от нагрузки, не приводится.
Чтобы обеспечить передачу высокого крутящего момента без проскальзывания, необходимо строго контролировать деформацию роликов планетарного механизма, а также производственные допуски коробки передач. Это представляет собой одну из основных технологических проблем, и это ядро инноваций, вносимых этой технологией (Schorsch, 2014).
NuGear
STAM s.r.l. — частная инженерная компания из Генуи, которая помогла разработать роботизированный сустав для гуманоидного робота I-Cub.Их NuGear — это нутационная коробка передач, которая изначально была задумана (Барбагелата и Корсини, 2000) для космических приложений, но могла бы развить свой потенциал для робототехники также за счет исследования альтернативных производственных средств.
Пока нет общедоступной информации о рабочих характеристиках этой коробки передач, что означает, что мы можем предоставить здесь только предварительный анализ ее топологии и результирующих характеристик, которых можно ожидать на основе ограниченной информации, доступной в основном из проекта Caxman EU ( CAxMan, 2020), для которого NuGear был вариантом использования, и из доступных патентов (Barbagelata et al., 2016).
На рисунке 8 внутренняя структура NuGear представлена с использованием эквивалентной конфигурации PGT — для облегчения понимания абстрагируется аспект нутации. Таким образом становится ясно, что NuGear напоминает два PGT Wolfrom, для которых несущая используется в качестве входа, соединенных последовательно, и где каждый из них соответствует одному из двух этапов, определенных в Barbagelata et al. (2016). Это еще раз указывает на то, что в этой коробке передач будет присутствовать относительно высокий коэффициент скрытой мощности.Для передаточного числа 1: 100 и при условии сбалансированного усиления 1:10 на каждой из двух ступеней, как предложено в Barbagelata et al. (2016), мы получаем, используя уравнения, выведенные в Приложении I, коэффициент скрытой мощности 32, что указывает на топологическую эффективность, аналогичную таковой у Wolfrom PGT.
Рисунок 8 . Внутренняя конфигурация двухступенчатой коробки передач NuGear для версии с оппозитными контактами планет адаптирована из CAxMan (2020) с разрешения © Stam S.r.l. Он также включает схему базовой топологии.
Еще предстоит подтвердить, в какой степени использование методов аддитивного производства может помочь STAM s.r.l. снизить большие затраты на производство конических зубчатых колес, а также определить, сможет ли операция нутации достичь достаточной надежности и более компактной формы, которые могут открыть дверь для ее использования в области робототехники (CAxMan, 2020).
Двусторонний привод
Компания FUJILAB в Иокогаме предложила в Fujimoto (2015) коробку передач с высокой степенью управляемости для робототехники, которая особенно подходит для работы без датчика крутящего момента (Kanai and Fujimoto, 2018).
Как видно на Рисунке 9, конфигурация этого устройства снова аналогична PGT Wolfrom. При такой топологии Fujimoto et al. смогли достичь при передаточном числе 1: 102 КПД при движении вперед 89,9% и КПД при движении задним ходом 89,2%. Пусковой крутящий момент без нагрузки в обратном направлении составил 0,016 Нм в коробке передач с внешним диаметром ~ Φ50 мм (Kanai and Fujimoto, 2018). Стратегия достижения такой высокой эффективности с топологией Wolfrom заключается в оптимизации коэффициентов сдвига профиля (Fujimoto and Kobuse, 2017).
Рисунок 9 . Внутренняя конфигурация двустороннего привода, высокоэффективной коробки передач, способной обеспечивать передаточное число 1: 102 с использованием топологии Wolfrom, любезно предоставлено © Yasutaka Fujimoto.
Эти многообещающие результаты — см. Таблицу 4 — показывают, что выравнивание соотношений подвода и углубления посредством оптимизации коэффициентов смещения профиля может привести к чрезвычайно высокой эффективности зацепления. Насколько известно авторам, эта стратегия была первоначально предложена Хори и Хаяши (1994) и особенно интересна в топологии Wolfrom, где она в конечном итоге может обеспечить эффективность выше 90% в сочетании с высокими передаточными числами и компактными топологиями.
Привод подшипника шестерни
Вслед за новаторской работой в этой области Джона М. Враниша из НАСА, результатом которой стало изобретение планетарной шестерни без водила во Вранише (1995) и подшипников с частичными зубьями (Враниш, 2006), NASA Goddard Space Летный центр представил свою концепцию нового зубчатого подшипника в Вайнберге и др. (2008).
Северо-Восточный университет в Бостоне продолжил разработку этого нового привода для применения в роботизированных соединениях.Как видно на Рисунке 10, он включает в себя коробку передач Wolfrom, адаптированную для включения конструкции Vranish без опоры и зубчатых подшипников. Подшипники шестерен представляют собой контакты качения, которые предусмотрены для каждой пары зубчатых зацеплений в соответствии с их делительным диаметром и уменьшают нагрузку на подшипники коробки передач (Brassitos et al., 2013). Эта топология обеспечивает удобную интеграцию электромотора, который, следовательно, встроен в полую часть большого солнечного зубчатого колеса в конфигурации, специально предназначенной для космических приложений (Brassitos and Jalili, 2017).
Рисунок 10 . Внутренняя конфигурация зубчатого подшипника, включая встроенный бесщеточный двигатель, адаптирована из Brassitos and Jalili (2017) с разрешения © 2017 Американское общество инженеров-механиков ASME. Справа также показана лежащая в основе топология Wolfrom с расщепленным реакционным кольцом.
В Brassitos and Jalili (2018) металлический прототип привода с зубчатым подшипником с передаточным числом 1:40 характеризуется жесткостью, трением и кинематической погрешностью.Измерения полностью соответствуют данным FUJILAB и подтверждают низкий пусковой момент без нагрузки в этой конфигурации (0,0165 Нм для внешнего диаметра коробки передач ~ 100 мм). После экспериментального измерения жесткости, трения и кинематической погрешности их привода (Brassitos and Jalili, 2018) интегрировали эти значения в динамическую модель, которая затем была смоделирована и сравнена с откликом скорости разомкнутого контура системы при свободном синусоидальном движении, показав хорошие результаты. корреляция и предлагает очень удобную высокую линейность передачи.
Предварительные измерения показали хороший комбинированный КПД двигателя и коробки передач Wolfrom с передаточным числом 1: 264 (Brassitos et al., 2013), что не очень хорошо коррелирует с рассчитанным скрытым коэффициентом мощности 196. КПД не был определен. снова в центре внимания недавних статей авторов, и мы, к сожалению, не смогли на данный момент подтвердить окончательные уровни эффективности, которых могут достичь новые прототипы.
В любом случае, привод с зубчатым подшипником дает очень интересные возможности для использования потенциала топологии Wolfrom в робототехнике.Возможность удаления несущей конструкции и встраивания электродвигателя в коробку передач в общем корпусе позволяет получить впечатляюще компактные конструкции. Возможность использования продольных роликов зубчатых подшипников для уменьшения радиальной нагрузки на подшипники также является многообещающим вариантом для повышения компактности и повышения эффективности (Brassitos et al., 2019).
Галакси Драйв
Schreiber and Schmidt (2015) защищает основные инновации, включенные в Galaxie Drive, коробку передач, которую WITTENSTEIN в настоящее время выводит на рынок прецизионных редукторов через свой стартап Wittenstein Galaxie GmbH, созданный в апреле 2020 года.
Хотя таблица данных и подробная информация еще не доступны, также раскрыты принцип работы и ожидаемая прибыль. Galaxie Drive представляет новый кинематический подход, основанный на линейном наведении одиночного зуба в зубчатом каркасе Teeth Carrier , но, по мнению этих авторов, его топология напоминает топологию деформационно-волнового механизма, см. Рис. 11. Гибкая линия заменена зубьями. Держатель, включающий два ряда отдельных зубцов, выполнен с возможностью радиального перемещения и зацепления с круговым шлицем в качестве вращающегося многоугольного вала выполняет роль генератора волн с многоугольным периметром (Schreiber and Röthlingshöfer, 2017).Следовательно, несколько отдельных зубьев входят в зацепление одновременно с круговым шлицем — так же, как в Harmonic Drive. По словам производителя, это вместе с двухточечным контактом с высокой устойчивостью к крутящему моменту между каждым отдельным зубом и зубчатым каркасом обеспечивает этому устройству характерный нулевой люфт, высокую жесткость на кручение и эталонное соотношение крутящего момента к весу.
Рисунок 11 . Деталь зацепления зубьев коробки передач Galaxy (R) DF адаптирована из Schreiber (2015) с разрешения © 2020 Wittenstein Galaxie GmbH.Он включает схему базовой топологии KHV.
В ходе прямого обмена мнениями представители Виттенштейна подтвердили, что очевидная проблема трения между отдельными зубьями и их направляющим круговым кольцом решена, и Galaxie может достичь максимальной эффективности выше 90%. Из-за лежащей в основе конфигурации KHV ожидаются большие коэффициенты скрытой мощности, но пока невозможно получить дальнейшее представление об эффективности зацепления, которая будет результатом радиального движения зубьев, которое включает новую логарифмическую спиральную боковую поверхность зуба (Мишель, 2015).
Первоначально привод Galaxie Drive предназначался для высокоточного оборудования, где высокая жесткость и сопротивление крутящему моменту могут помочь увеличить скорость и производительность. В будущем мы, безусловно, сможем оценить потенциал этой инновационной технологии также для робототехнических приложений.
Обсуждение
Новое поколение робототехнических устройств меняет приоритеты в выборе подходящих коробок передач. Вместо высочайшей точности на высоких скоростях эти устройства предъявляют более строгие требования в отношении легких и очень эффективных устройств механического усиления.
Сверхлегкие приводы деформационных волн (HD, E-cyclo), безусловно, находятся в очень хорошем положении для удовлетворения этих потребностей, что подтверждается их нынешним доминированием в области коботов. При рассмотрении привода волны деформации для роботизированной задачи pHRI работа при низких крутящих моментах и скоростях должна быть сведена к минимуму, если эффективность должна быть максимальной. Хотя их оптимизированная геометрия зубьев способствует более линейной жесткости на кручение, трение остается очень нелинейным и зависит от направления, вызывая также определенные ограничения использования.Храповик как следствие ударной нагрузки — еще одно ограничение, которое следует учитывать для этого типа редуктора, которое E-Cyclo не должен иметь (SUMITOMO, 2020).
Циклоидные приводы
прошли долгий путь, чтобы в конечном итоге стать доминирующей технологией в промышленных роботах. Благодаря технологическим достижениям, направленным на уменьшение люфта и ограничений скорости ввода, теперь они могут обеспечивать хорошую точность с приемлемой эффективностью, несмотря на высокие скрытые коэффициенты мощности, возникающие из-за лежащей в основе топологии KHV, эквивалентной топологии приводов с волновой деформацией.Использование ступени перед зацеплением также вносит важный вклад в достижение этой цели за счет повышения базовой топологической эффективности. Сверхлегкие конструкции, подобные конструкции SPINEA, демонстрируют интересный потенциал, но в конечном итоге потребуются более прорывные подходы, такие как пластиковые материалы, чтобы удовлетворить потребности в более легких коробках передач и более высоких передаточных числах, необходимых для HRI. Пока это не станет возможным, циклоидные приводы можно рассматривать только для больших полезных нагрузок, когда их больший вес и результирующая инерция не критичны для работы.Когда исключительная точность не требуется, можно избежать мер компенсации люфта в пользу повышения эффективности и более низких пусковых моментов. В любом случае следует позаботиться о том, чтобы адекватно управлять пульсацией крутящего момента, и, вероятно, необходимо будет оставить этап перед включением, чтобы обеспечить высокие скорости входного двигателя.
Невозможность планетарных редукторов уменьшить люфт при сохранении хорошей производительности и ограничения жесткости на кручение ограничили их использование в промышленной робототехнике. Тем не менее, PGT чрезвычайно универсальны, что демонстрирует их широкое использование во множестве современных промышленных устройств.И они изначально эффективны, надежны и относительно просты — дешевы — в производстве. Это может объяснить недавний интерес робототехников к PGT и почему пять из шести изученных здесь принципиально инновационных редукторов основаны на конфигурации PGT с высоким передаточным числом: топологии Wolfrom. Лучшая топологическая эффективность в сочетании с улучшением эффективности зацепления за счет модификации профиля или даже еще одного шага вперед по замене зубьев контактами качения являются многообещающими характеристиками. В сочетании с возможностями, открываемыми их полой топологией, эти элементы потенциально могут привести к возвращению PGT в робототехнику.
Наше исследование показывает, что большая универсальность технологий редукторов, используемых в робототехнике, представляет собой серьезную проблему для прямого сравнения их характеристик. Как показывают примеры люфта и максимальной входной скорости, адекватные модификации конструкции могут надлежащим образом компенсировать большинство исходных слабых мест определенной технологии за счет компромиссов в других аспектах, обычно включая эффективность, размер, вес и стоимость. Точно так же большие скрытые коэффициенты мощности указывают на существенный топологический недостаток с точки зрения эффективности, но он также может быть — по крайней мере частично — компенсирован соответствующими модификациями.Таким образом, обучающий эффект заключается в том, что выбор подходящей технологии редуктора для определенного применения pHRI является чрезвычайно сложным процессом, требующим глубокого понимания фундаментальных недостатков, возможностей улучшения и производных компромиссов каждой технологии. Наша первоначальная цель исследования — внести свой вклад в простую таблицу выбора, способную помочь неопытным робототехникам в выборе подходящих технологий редукторов для своих робототехнических устройств, поэтому не могла быть достигнута.Вместо этого в этой статье собраны и объясняются основные параметры выбора и связанные с ними проблемы в каждой из доступных технологий, чтобы помочь инженерам-роботам pHRI развить необходимые навыки, необходимые для осознанного выбора подходящей, индивидуально оптимизированной коробки передач.
Два важных аспекта роботизированных редукторов для pHRI, к сожалению, не могут быть адекватно оценены в нашем исследовании на данном этапе: шум и стоимость. По мере того, как робототехнические устройства становятся все ближе к людям, робототехники уделяют все больше внимания шуму.Редукторы, безусловно, представляют собой важный источник шума (переносимого воздухом и конструкцией), но, к сожалению, на данном этапе рекомендуется исключить шум из нашего анализа по двум основным ограничениям. Во-первых, большинство производителей редукторов еще не предоставляют количественных оценок шумовых характеристик, и когда они это делают, они, как правило, следуют другим методам испытаний, которые также не особенно подходят для рабочих условий в pHRI. Во-вторых, современные технологии коробок передач все еще должны пройти ожидаемый процесс оптимизации шума.
Стоимость также является важным параметром, делающим технологии pHRI более доступными, и поэтому становится важным при выборе подходящих редукторов для будущих робототехнических технологий. К сожалению, и здесь научному сообществу доступно недостаточное количество исходной информации для систематической справедливой оценки крупномасштабного экономического потенциала определенной технологии редукторов. Прежде чем можно будет определить подходящую основу для оценки этого потенциала, требуется большой объем исследовательской работы, которая явно выходит за рамки нашего исследования.
Эти два ограничения очерчивают основные рекомендации авторов для интересных направлений будущих исследований. Определение стандартизованных условий испытаний воздушного и конструктивного шума в коробках передач, особенно адаптированных к типичным условиям эксплуатации и потребности в pHRI, могло бы позволить прямое сравнение различных технологий и способствовать их оптимизации шума. Кроме того, составление доступных моделей затрат для производственных процессов, связанных с изготовлением коробок передач, и их адаптация к специфике конкретных технологий, используемых в робототехнике, позволит составить основу для оценки потенциала крупномасштабных затрат (и препятствий) разные технологии.
Авторские взносы
Все авторы принимали участие в предварительной работе, связанной с этой темой исследования, и внесли свой вклад в концептуализацию структуры, представленной в рукописи. PG работала над созданием подходящей системы оценки для выполнения анализа коробки передач и взяла на себя инициативу в написании рукописи и преобразовании ее в ее нынешнюю форму. PG и ES в равной степени внесли свой вклад в определение потенциально подходящих технологий и в их анализ с помощью фреймворка.Все корректуры авторов прочитали и внесли свой вклад в окончательную версию статьи.
Финансирование
SC, ES (доктор наук) и TV (доктор наук) являются научными сотрудниками Исследовательского фонда Flanders — Fonds voor Wetenschappelijk Onderzoek (FWO). Эта работа частично финансируется Программой исследований и инноваций Европейского Союза Horizon 2020 в рамках Соглашения о гранте № 687662 — проект SPEXOR.
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Благодарности
Авторы хотели бы поблагодарить профессора Ясутака Фудзимото из Йокогамского национального университета, а также компании Neugart GmbH, Harmonic Drive SE, Sumitomo Drive Germany GmbH, Genesis Robotics, Innovative Mechatronic Systems B.V., Stam s.r.l. и Wittenstein Galaxy GmbH за любезную поддержку и полученные объяснения, а также за разрешение использовать прилагаемые изображения их устройств.
Дополнительные материалы
Дополнительные материалы к этой статье можно найти в Интернете по адресу: https: // www.frontiersin.org/articles/10.3389/frobt.2020.00103/full#supplementary-material
Список литературы
Альбу-Шеффер, А., Эйбергер, О., Гребенштейн, М., Хаддадин, С., Отт, К., Вимбок, Т. и др. (2008). Мягкая робототехника. Робот IEEE. Автомат. Mag. 15, 20–30. DOI: 10.1109 / MRA.2008.927979
CrossRef Полный текст | Google Scholar
Arigoni, R., Cognigni, E., Musolesi, M., Gorla, C., and Concli, F. (2010). «Планетарные редукторы: эффективность, люфт, жесткость» в Международной конференции VDI по зубчатым колесам (Мюнхен).
Google Scholar
Арнаудов, К., Караиванов, Д. (2005). «Планетарные зубчатые передачи с высшим составом» в Международная конференция VDI по зубчатым колесам , Vol. 1904 (Мюнхен: VDI-Bericht), 327–344.
Барбагелата А. и Корсини Р. (2000). Riduttore Ingranaggi Conici Basculanti . Патент Италии № IT SV20000049A1. Рим: Ufficio Italiano Brevetti e Marchi.
Барбагелата А., Эллеро С. и Ландо Р. (2016). Планетарный редуктор .Европейский патент № EP2975296A2. Мюнхен: Европейское патентное ведомство.
Брасситос, Э., Джалили Н. (2017). Проектирование и разработка компактного высокомоментного роботизированного привода для космических механизмов. J. Mech. Робот. 9, 061002-1–061002-11. DOI: 10.1115 / 1.4037567
CrossRef Полный текст | Google Scholar
Брасситос, Э., Джалили Н. (2018). «Определение характеристик жесткости, трения и кинематической погрешности в трансмиссиях с зубчатыми подшипниками», в ASME 2018 International Design Engineering Technical Conference и Computers and Information in Engineering Conference (Квебек: цифровая коллекция Американского общества инженеров-механиков).DOI: 10.1115 / DETC2018-85647
CrossRef Полный текст | Google Scholar
Brassitos, E., Mavroidis, C., and Weinberg, B. (2013). «Зубчатый подшипниковый привод: новый компактный привод для роботизированных шарниров», в ASME 2013 Международная техническая конференция по проектированию и Компьютеры и информация в инженерной конференции (Портленд, Орегон: цифровая коллекция Американского общества инженеров-механиков). DOI: 10.1115 / DETC2013-13461
CrossRef Полный текст | Google Scholar
Брасситос, Э., Вайнберг, Б., Цинчао, К., и Мавроидис, К. (2019). Контактная система изогнутого подшипника . Патент США № US10174810B2. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
Каланка, А., Мурадор, Р., Фиорини, П. (2015). Обзор алгоритмов совместимого управления жесткими и фиксированными роботами. IEEE / ASME Trans. Мех. 21, 613–624. DOI: 10.1109 / TMECH.2015.2465849
CrossRef Полный текст | Google Scholar
Карбоне, Г., Mangialardi, L., и Mantriota, G. (2004). Сравнение характеристик полнотороидальных и полутороидальных тяговых приводов. мех. Мах. Теория 39, 921–942. DOI: 10.1016 / j.mechmachtheory.2004.04.003
CrossRef Полный текст | Google Scholar
Cetinkunt, S. (1991). Проблемы оптимального проектирования в высокоскоростных высокоточных сервосистемах движения. Мехатроника 1, 187–201. DOI: 10.1016 / 0957-4158 (91)
-A
CrossRef Полный текст | Google Scholar
Чен, К.и Анхелес Дж. (2006). Потери виртуальной мощности и механические потери мощности в зубчатых зацеплениях планетарных зубчатых передач. ASME J. Mech. Des. 129, 107–113. DOI: 10.1115 / 1.2359473
CrossRef Полный текст | Google Scholar
Чен, Д. З., и Цай, Л. В. (1993). Кинематический и динамический синтез редукторных робототехнических механизмов. J. Mech. Des. 115, 241–246. DOI: 10.1115 / 1.2
CrossRef Полный текст | Google Scholar
Crispel, S., López-García, P., Verstraten, T., Convens, B., Saerens, E., Vanderborght, B., and Lefeber, D. (2018). «Представляем составные планетарные передачи (C-PGT): компактный способ достижения высоких передаточных чисел для носимых роботов», на Международном симпозиуме по носимой робототехнике (Пиза), 485–489. DOI: 10.1007 / 978-3-030-01887-0_94
CrossRef Полный текст | Google Scholar
Де Сантис А., Сицилиано Б., Де Лука А. и Бикки А. (2008). Атлас физического взаимодействия человека и робота. мех.Мах. Теория 43, 253–270. DOI: 10.1016 / j.mechmachtheory.2007.03.003
CrossRef Полный текст | Google Scholar
Дель Кастильо, Дж. М. (2002). Аналитическое выражение КПД планетарных зубчатых передач. мех. Мах. Теория 37, 197–214. DOI: 10.1016 / S0094-114X (01) 00077-5
CrossRef Полный текст | Google Scholar
Дрессчер, Д., де Врис, Т. Дж., И Страмиджоли, С. (2016). «Выбор мотор-редуктора для повышения энергоэффективности», Международная конференция IEEE 2016 по усовершенствованной интеллектуальной мехатронике (AIM) (Банф, AB: IEEE), 669–675.DOI: 10.1109 / AIM.2016.7576845
CrossRef Полный текст | Google Scholar
Фудзимото Ю. (2015). Эпициклический зубчатый привод и метод его проектирования . Патент Японии № JP2015164100. Токио: Патентное ведомство Японии.
Fujimoto, Y., and Kobuse, D. (2017). «Роботизированные приводы с высокой управляемостью назад», на международном семинаре IEEJ по обнаружению, срабатыванию, управлению движением и оптимизации (SAMCON) (Нагаока), IS2–1.
GAM (2020 г.). GSL Трансмиссионный редуктор .Каталог.
ГЕНЕЗИС (2018). Усилитель крутящего момента Reflex — движущая сила будущего . Tech Update Общайтесь.
Гиберти Х., Чинквемани С. и Леньяни Г. (2010). Влияние механических характеристик трансмиссии на выбор мотор-редуктора. Мехатроника 20, 604–610. DOI: 10.1016 / j.mechatronics.2010.06.006
CrossRef Полный текст | Google Scholar
Жирар, А., Асада, Х. Х. (2017). Использование естественной динамики нагрузки с приводами с регулируемым передаточным числом. Робот IEEE. Автомат. Lett. 2, 741–748. DOI: 10.1109 / LRA.2017.2651946
CrossRef Полный текст | Google Scholar
Горла К., Даволи П., Роза Ф., Лонгони К., Чиоцци Ф. и Самарани А. (2008). Теоретический и экспериментальный анализ циклоидного редуктора скорости. J. Mech. Des. 130: 112604. DOI: 10.1115 / 1.2978342
CrossRef Полный текст | Google Scholar
Groothuis, S. S., Folkertsma, G.A., и Stramigioli, S. (2018). Общий подход к достижению стабильности и безопасного поведения в распределенных роботизированных архитектурах. Фронт. Робот. AI 5: 108. DOI: 10.3389 / frobt.2018.00108
CrossRef Полный текст | Google Scholar
Хаддадин, С., Альбу-Шеффер, А., и Хирцингер, Г. (2009). Требования к безопасным роботам: измерения, анализ и новые идеи. Внутр. J. Робот. Res , 28, 1507–1527. DOI: 10.1177 / 0278364
3970
CrossRef Полный текст | Google Scholar
Хаддадин, С., Крофт, Э. (2016). «Физическое взаимодействие человека и робота», в Springer Handbook of Robotics (Cham: Springer), 1835–1874.DOI: 10.1007 / 978-3-319-32552-1_69
CrossRef Полный текст | Google Scholar
HALODI Robotics (2018). ДВИГАТЕЛЬ с прямым приводом Revo1 ™ [Брошюра], Moss. Доступно в Интернете по адресу: https://www.halodi.com/revo1 (по состоянию на 30 апреля 2020 г.).
Хэм, Р. В., Шугар, Т. Г., Вандерборг, Б., Холландер, К. В., и Лефебер, Д. (2009). Соответствующие конструкции приводов. Робот IEEE. Автомат. Mag. 16, 81–94. DOI: 10.1109 / MRA.2009.933629
CrossRef Полный текст | Google Scholar
Гармонический привод A.G. (2014) Технические данные Наборы компонентов CSD-2A . Каталог.
Хлебаня Г., Куловец С. (2015). «Разработка плоскоцентрической коробки передач на основе геометрии S-образной шестерни», в 11. Kolloquium Getriebetechnik (Мюнхен), 205–216.
Google Scholar
Хоган, Н. (1984). «Контроль импеданса: подход к манипуляции», в , 1984, Американская конференция по контролю, (Сан-Диего, Калифорния: IEEE), 304–313. DOI: 10.23919 / ACC.1984.4788393
CrossRef Полный текст | Google Scholar
Хори, К., и Hayashi, I. (1994). Максимальный КПД обычных механических планетарных шестерен парадокса для понижающего привода. Пер. Jpn. Soc. Мех. Англ. 60, 3940–3947. DOI: 10.1299 / kikaic.60.3940
CrossRef Полный текст
Хантер И. В., Холлербах Дж. М. и Баллантайн Дж. (1991). Сравнительный анализ актуаторных технологий для робототехники. Робот. Ред. 2, 299–342.
Google Scholar
IMSystems (2019). проезд Архимеда.IMSystems — Drive Innovation [Брошюра], Делфт.
Икбал, Дж., Цагаракис, Н. Г., и Колдуэлл, Д. Г. (2011). «Дизайн носимого оптимизированного экзоскелета руки с прямым приводом», в Международной конференции по достижениям в области взаимодействия компьютера и человека (ACHI) (Гозье).
PubMed Аннотация | Google Scholar
Канаи Ю., Фудзимото Ю. (2018). «Бессенсорное управление крутящим моментом для экзоскелета с электроприводом с использованием приводов с высокой степенью обратного привода», на IECON 2018–44-й ежегодной конференции Общества промышленной электроники IEEE (Вашингтон, округ Колумбия: IEEE), 5116–5121.DOI: 10.1109 / IECON.2018.85
CrossRef Полный текст | Google Scholar
Капелевич А. и ООО «AKGears» (2013). Анализ планетарных передач с высоким передаточным числом. Передаточное отношение 3, 10.
Google Scholar
Караяннидис Ю., Друкас Л., Папагеоргиу Д. и Доулжери З. (2015). Управление роботом для выполнения задач и повышения безопасности при ударах. Фронт. Робот. AI 2:34. DOI: 10.3389 / frobt.2015.00034
CrossRef Полный текст | Google Scholar
Кашири, Н., Abate, A., Abram, S.J., Albu-Schaffer, A., Clary, P.J., Daley, M., et al. (2018). Обзор принципов энергоэффективного передвижения роботов. Фронт. Робот. AI 5: 129. DOI: 10.3389 / frobt.2018.00129
CrossRef Полный текст | Google Scholar
Ким, Дж., Парк, Ф. К., Парк, Ю., и Шизуо, М. (2002). Проектирование и анализ сферической бесступенчатой трансмиссии. J. Mech. Des . 124, 21–29. DOI: 10.1115 / 1.1436487
CrossRef Полный текст | Google Scholar
Классен, Дж.Б. (2019). Дифференциальная планетарная коробка передач . Международный патент № WO2019 / 051614A1. Женева: Всемирная организация интеллектуальной собственности, Международное бюро.
Google Scholar
Коряков-Савойский Б., Алексахин И., Власов И. П. (1996). Зубчатая передача . Патент США № US5505668A. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
Ли С. (2014). «Новейшие технологии проектирования зубчатых передач с большими передаточными числами», в материалах Proceedings of International Gear Conference (Lyon), 427–436.DOI: 10.1533 / 9781782421955.427
CrossRef Полный текст | Google Scholar
Луман, Дж. (1996). Zahnradgetriebe (зубчатые механизмы) . Берлин: Springer-Verlag. DOI: 10.1007 / 978-3-540-89460-5
CrossRef Полный текст
Лопес-Гарсия, П., Криспель, С., Верстратен, Т., Сэренс, Э., Конвенс, Б., Вандерборгт, Б., и Лефебер, Д. (2018). «Конструкция планетарного редуктора для активной носимой робототехники, основанная на анализе видов отказов и последствий (FMEA)», в International Symposium on Wearable Robotics (Pisa), 460–464.DOI: 10.1007 / 978-3-030-01887-0_89
CrossRef Полный текст | Google Scholar
Лопес-Гарсия, П., Криспель, С., Верстратен, Т., Сэренс, Э., Вандерборгт, Б., и Лефебер, Д. (2019a). «Редукторы Wolfrom для легкой робототехники, ориентированной на человека», в материалах Proceedings of the International Conference on Gears 2019 (Мюнхен: VDI), 753–764.
Лопес-Гарсия, П., Криспель, С., Верстратен, Т., Сэренс, Э., Вандерборгт, Б., и Лефебер, Д. (2019b). «Настройка планетарных зубчатых передач для поддержки и воспроизведения конечностей человека», в MATEC Web of Conferences (Варна: EDP Sciences), 01014.DOI: 10.1051 / matecconf / 201928701014
CrossRef Полный текст | Google Scholar
Лафлин, К., Альбу-Шеффер, А., Хаддадин, С., Отт, К., Стеммер, А., Вимбек, Т., и Хирцингер, Г. (2007). Легкий робот DLR: концепции проектирования и управления роботами в среде обитания человека. Ind. Робот. Int. J . 34, 376–385. DOI: 10.1108 / 01439
CrossRef Полный текст | Google Scholar
Макмиллан Р. Х. и Дэвис П. Б. (1965). Аналитическое исследование систем раздвоенной передачи энергии. J. Mech. Англ. Sci . 7, 40–47. DOI: 10.1243 / JMES_JOUR_1965_007_009_02
CrossRef Полный текст | Google Scholar
Mayr, C. (1989). Präzisions-Getriebe für die Automation: Grundlagen und Anwendungsbeispiele . Ландсберг: Verlag Moderne Industrie.
Мишель С. (2015). Logarithmische spirale statt evolvente. Maschinenmarkt № . 18, 40–42.
Михайлидис А., Афанасопулос Э. и Оккас Э. (2014). «Эффективность циклоидного редуктора», в International Gear Conference (Lyon Villeurbanne), 794–803.DOI: 10.1533 / 9781782421955.794
CrossRef Полный текст | Google Scholar
Морозуми, М. (1970). Эвольвентное внутреннее зацепление со смещением профиля . Патент США № US3546972A. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
Мюллер, Х. В. (1998). Die Umlaufgetriebe: Auslegung und vielseitige Anwendungen . Берлин; Гейдельберг: Springer-Verlag. DOI: 10.1007 / 978-3-642-58725-2
CrossRef Полный текст | Google Scholar
Мульцер, Ф.(2010). Systematik hoch übersetzender koaxialer getriebe (Докторская диссертация). Технический университет Мюнхена, Мюнхен, Германия.
Google Scholar
Musser, C. W. (1955). Деформационно-волновая передача . Патент США № US2
3A. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
НАБТЕКО (2018). Прецизионный редуктор серии RV — N . CAT.180410. Каталог.
Нойгарт, А. Г. (2020). PLE Линия эконом-класса .Каталог.
Ниманн Г., Винтер Х. и Хён Б. Р. (1975). Maschinenelemente, Vol. 1 . Берлин; Гейдельберг; Нью-Йорк, штат Нью-Йорк: Спрингер.
Google Scholar
Pasch, K. A., and Seering, W. P. (1983). «О приводных системах для высокопроизводительных машин», в Машиностроение (Нью-Йорк, Нью-Йорк: Машиностроение Общества ASME-AMER), 107–107.
Pennestri, E., and Freudenstein, F. (1993). Механический КПД планетарных зубчатых передач. ASME J. Mech. Des . 115, 645–651. DOI: 10.1115 / 1.2
9
CrossRef Полный текст | Google Scholar
Петтерссон, М., и Олвандер, Дж. (2009). Оптимизация трансмиссии промышленных роботов. IEEE Trans. Робот. 25, 1419–1424. DOI: 10.1109 / TRO.2009.2028764
CrossRef Полный текст | Google Scholar
Фам, А. Д., и Ан, Х. Дж. (2018). Прецизионные редукторы для промышленных роботов, участвующих в четвертой промышленной революции: современное состояние, анализ, дизайн, оценка производительности и перспективы. Внутр. J. Precis. Англ. Manuf. Green Technol. 5, 519–533. DOI: 10.1007 / s40684-018-0058-x
CrossRef Полный текст | Google Scholar
Резазаде, С., Херст, Дж. У. (2014). «Об оптимальном выборе двигателей и трансмиссий для электромеханических и робототехнических систем», в Международная конференция IEEE / RSJ 2014 по интеллектуальным роботам и системам (Чикаго, Иллинойс: IEEE), 4605–4611. DOI: 10.1109 / IROS.2014.6943215
CrossRef Полный текст | Google Scholar
Роос, Ф., Йоханссон, Х., Викандер, Дж. (2006). Оптимальный выбор двигателя и редуктора для мехатронных приложений. Мехатроника 16, 63–72. DOI: 10.1016 / j.mechatronics.2005.08.001
CrossRef Полный текст | Google Scholar
Розенбауэр Т. (1995). Getriebe für Industrieroboter: Beurteilungskriterien . Kenndaten, Einsatzhinweise: шейкер.
Россман, А. М. (1934). Механизм . Патент США № US 1970251. Вашингтон, округ Колумбия: У.S. Ведомство по патентам и товарным знакам.
Google Scholar
Saerens, E., Crispel, S., García, P. L., Verstraten, T., Ducastel, V., Vanderborght, B., and Lefeber, D. (2019). Законы масштабирования для роботизированных трансмиссий. мех. Мах. Теория 140, 601–621. DOI: 10.1016 / j.mechmachtheory.2019.06.027
CrossRef Полный текст | Google Scholar
Шафер И., Бурлье П., Хантшак Ф., Робертс Э. У., Льюис С. Д., Форстер Д. Дж. И Джон К. (2005). «Космическая смазка и характеристики шестерен гармонического привода», , 11-й Европейский симпозиум по космическим механизмам и трибологии, ESMATS 2005 (Люцерн), 65–72.
Google Scholar
Шейнман, В., Маккарти, Дж. М., и Сонг, Дж. Б. (2016). «Механизм и приведение в действие», в Springer Handbook of Robotics (Cham: Springer), 67–90. DOI: 10.1007 / 978-3-319-32552-1_4
CrossRef Полный текст | Google Scholar
Шемпф, Х. (1990). Сравнительное проектирование, моделирование и анализ управления роботизированными трансмиссиями (кандидатская диссертация). № WHOI-90-43. Кафедра машиностроения и Океанографический институт Вудс-Холла, Массачусетский технологический институт, Кембридж, Массачусетс, США.DOI: 10.1575 / 1912/5431
CrossRef Полный текст | Google Scholar
Шемпф, Х. и Йоргер, Д. Р. (1993). Изучение доминирующих рабочих характеристик в трансмиссиях роботов. ASME J. Mech. Des. 115, 472–482. DOI: 10.1115 / 1.2
4
CrossRef Полный текст | Google Scholar
Шорш, Дж. Ф. (2014). Составной планетарный привод трения . Патент Нидерландов № 2013496. Де Хааг: Octrooicentrum Nederland.
Google Scholar
Шрайбер, Х.(2015). «Revolutionäres getriebeprinzip durch neuinterpretation von maschinenelementen — Die WITTENSTEIN Galaxie®-Kinematik», в Dresdner Maschinenelemente Kolloquium, DMK (Дрезден), 2015. S.
Шрайбер, Х., Рётлингсхёфер, Т. (2017). «Кинематическая классификация коробки передач, содержащей отдельные упорные зубья, и ее преимущества по сравнению с существующими подходами», в Международной конференции по зубчатым колесам , ICG (Мюнхен).
Шрайбер, Х., и Шмидт, М.(2015). Getriebe. Патент Германии № DE 10 2015 105 525 A1. Мюнхен: Deutsches Patent- und Markenamt.
Google Scholar
Сенсинджер, Дж. У. (2010). «Выбор двигателей для роботов, использующих биомиметические траектории: оптимальные критерии, обмотки и другие соображения», в Международная конференция IEEE по робототехнике и автоматизации, 2010 г., (Анкоридж, AK: IEEE), 4175–4181. DOI: 10.1109 / ROBOT.2010.5509620
CrossRef Полный текст | Google Scholar
Сенсингер, Дж.W. (2013). КПД высокочувствительных зубчатых передач, например, циклоидных передач. ASME J. Mech. Des. 135, 071006-1–071006-9. DOI: 10.1115 / 1.4024370
CrossRef Полный текст | Google Scholar
Сенсинджер, Дж. У., Кларк, С. Д., Шорш, Дж. Ф. (2011). «Внешний и внутренний роторы в роботизированных бесщеточных двигателях», Международная конференция IEEE по робототехнике и автоматизации, 2011 г., (Монреаль, Квебек: IEEE), 2764–2770. DOI: 10.1109 / ICRA.2011.5979940
CrossRef Полный текст | Google Scholar
Сеок, С., Wang, A., Chuah, M. Y. M., Hyun, D. J., Lee, J., Otten, D. M., et al. (2014). Принципы разработки энергоэффективного передвижения на ногах и их реализация на роботе-гепарде Массачусетского технологического института. IEEE / ASME Trans. Мех. 20, 1117–1129. DOI: 10.1109 / TMECH.2014.2339013
CrossRef Полный текст | Google Scholar
Сицилиано Б., Шавикко Л., Виллани Л. и Ориоло Г. (2010). Робототехника: моделирование, планирование и управление . Лондон: Springer Science and Business Media. DOI: 10.1007 / 978-1-84628-642-1
CrossRef Полный текст | Google Scholar
Слэттер Р. (2000). Weiterentwicklung eines Präzisionsgetriebes für die Robotik . Санкт-Леонард: Antriebstechnik.
Google Scholar
SPINEA (2017). TwinSpin — высокоточные редукторы — Präzisionsgetriebe . Каталог.
Страмиджоли, С., Ван Оорт, Г., и Дертьен, Э. (2008). «Концепция нового энергоэффективного привода», Международная конференция IEEE / ASME 2008 г. по передовой интеллектуальной мехатронике (Сиань: IEEE), 671–675.DOI: 10.1109 / AIM.2008.4601740
CrossRef Полный текст | Google Scholar
СУМИТОМО (2017). Fine Cyclo® Spielfreie Präzisionsgetriebe . Каталог 9
СУМИТОМО (2020). Приводы управления движением E-Cyclo®. Каталог F10001E-1.
Талбот Д., Кахраман А. (2014). «Методология прогнозирования потерь мощности планетарных передач», в International Gear Conference (Lyon-Villeurbanne), 26–28. DOI: 10.1533 / 9781782421955.625
CrossRef Полный текст
Томчик, Х. (2000). Регулирующее устройство с планетарной передачей . Европейский патент № EP1244880B1. Мюнхен: Европейское патентное ведомство.
Google Scholar
Токсири, С., Наф, М. Б., Лаццарони, М., Фернандес, Дж., Спозито, М., Полиеро, Т. и др. (2019). «Экзоскелеты с опорой на спину для профессионального использования: обзор технологических достижений и тенденций», в IISE Trans. Ок. Эргон. Гм. Факторы 7, 3–4, 237–249.DOI: 10.1080 / 24725838.2019.1626303
CrossRef Полный текст | Google Scholar
Ван де Стрете, Х. Дж., Дегезель П., Де Шуттер Дж. И Бельманс Р. Дж. (1998). Критерий выбора серводвигателя для мехатронных приложений. IEEE / ASME Trans. Мех. 3, 43–50. DOI: 10.1109 / 3516.662867
CrossRef Полный текст | Google Scholar
Вел, А. Дж., И Се, С. К. (2016). На пути к совместимым и пригодным для носки роботизированным ортезу: обзор текущих и новых актуаторных технологий. Med. Англ. Phys. 38, 317–325. DOI: 10.1016 / j.medengphy.2016.01.010
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Verstraten, T., Furnémont, R., Mathijssen, G., Vanderborght, B., and Lefeber, D. (2016). «Энергопотребление мотор-редукторов постоянного тока в динамических приложениях: сравнение подходов к моделированию» в IEEE Robot. Автомат. Lett. 1, 524–530. DOI: 10.1109 / LRA.2016.2517820
CrossRef Полный текст | Google Scholar
Враниш, Дж.М. (1995). Планетарный привод без несущей и против люфта . Патент США № US5409431. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
Враниш, Дж. М. (2006). Подшипники частичных зубчатых передач . Патент США № US2006 / 0219039A1. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
Ван, А., Ким, С. (2015). «Направленная эффективность в редукторных трансмиссиях: характеристика обратного движения в сторону улучшенного проприоцептивного контроля», в IEEE International Conference on Robotics and Automation (ICRA), 2015 г.DOI: 10.1109 / ICRA.2015.7139307
CrossRef Полный текст | Google Scholar
Вайнберг, Б., Мавроидис, К., и Враниш, Дж. М. (2008). Привод подшипника шестерни . Патент США № US2008 / 0045374A1. Вашингтон, округ Колумбия: Бюро по патентам и товарным знакам США.
Google Scholar
WinterGreen Research (2018). Прецизионные редукторы деформационных волн и редукторы RV и RD: доли рынка, стратегия и прогнозы, во всем мире, с 2018 по 2024 годы . WIN0418002.
WITTENSTEIN AG (2020 г.). Technische Broschüre SP + und TP + Getrieben. Каталог.
Вольф, А. (1958). Die Grundgesetze der Umlaufgetriebe . Брауншвейг: Фридр. Vieweg и Sohn.
Вольфром, У. (1912). Der Wirkungsgrad von Planetenrädergetrieben. Werkstattstechnik 6, 615–617.
Ю. Д., Бичли Н. (1985). О механическом КПД дифференциала. ASME J. Mech. Пер. Автомат. 107, 61–67.DOI: 10.1115 / 1.3258696
CrossRef Полный текст | Google Scholar
Зинн М., Рот Б., Хатиб О. и Солсбери Дж. К. (2004). Новый подход к срабатыванию для создания роботов, удобных для человека. Внутр. J. Робот. Res. 23, 379–398. DOI: 10.1177 / 0278364
2193
CrossRef Полный текст | Google Scholar
Коробка передач | Урок | Академия роботов
Практически все электродвигатели используются вместе с редукторами. Причина этого в том, что электродвигатели развивают относительно низкий крутящий момент.Они не особо сильные. Однако они способны очень быстро вращаться. Таким образом, мы можем использовать коробку передач, чтобы найти компромисс между скоростью и крутящим моментом. Конечно, бесплатного обеда не бывает, а коробка передач вносит некоторую неэффективность, есть некоторую потерю мощности. Эта потеря мощности связана с тепловым и акустическим шумом.
Если вы используете велосипед, вы, вероятно, хорошо знакомы с концепцией передачи. Электродвигатели могут вращаться очень-очень быстро, но они не развивают большой крутящий момент, они слабые.
Теперь это немного похоже на езда на велосипеде в гору. Вы хотите изменить большое количество оборотов педалей, чтобы уменьшить нагрузку на эти педали. Вы жертвуете большой скоростью ради большого крутящего момента.
Для электродвигателя это то же самое, что и для велосипеда, у вас есть маленькая звездочка спереди на педалях, а у вас есть звездочка большего размера на заднем колесе. Таким образом, на каждый оборот электродвигателя приходится только половина оборота выходного вала редуктора двигателя.Таким образом, двигатель вращается довольно быстро, выходной вал вращается довольно медленно, но крутящий момент двигателя увеличивается за счет передаточного числа.
Вот двигатель с одноступенчатым редуктором. Мы называем это редуктором, потому что за каждый оборот двигателя выходной вал поворачивается меньше одного раза. Когда мы говорим о двух сторонах коробки передач, мы называем ее стороной двигателя, которая обозначена индексом M, а сторона нагрузки — индексом L. Передаточное число коробки передач — заглавная G, и это соотношение числа зубьев на большое колесо к числу зубцов на маленьком колесе.А для понижающей коробки G больше единицы.
Выходная скорость омега L равна 1 на G, умноженном на омега N. Таким образом, скорость выходного вала ниже скорости двигателя. Выходной крутящий момент tau L равен G, умноженному на крутящий момент двигателя tau M, поэтому выходной крутящий момент больше крутящего момента двигателя. Это фундаментальные уравнения, описывающие характеристики коробки передач. Он снижает скорость и увеличивает крутящий момент.
Планетарный роботизированный редуктор с нулевым люфтом, серия GPL
Роботизированная планетарная коробка передач
GAM серии GPL сочетает в себе самый низкий люфт и высокую жесткость при опрокидывании с безвибрационным движением для плавного, контролируемого движения в робототехнике и управлении движением.
Характеристики
- Люфт ≤ 0,1 угл.мин (6 угл.сек) , в 10 раз лучше, чем у других прецизионных редукторов
- Лучшая на рынке жесткость на кручение для ≤ 0,6 угл. Мин без холостого хода
- Запатентованная конструкция гарантирует, что люфт не будет увеличиваться в течение срока службы коробки передач
- Проверенная производительность, признанная в отрасли
- Семь типоразмеров с номинальным выходным крутящим моментом от 445 до 3505 Нм и передаточным числом от 50: 1 до 200: 1
- Фланцевый выход со сплошным валом (GPL-F) или фланцевый выход с полым валом (GPL-H) (сквозное отверстие до 75 мм)
- Встроенная пластина адаптера двигателя , готовая к установке двигателя
- Доступен георадар с прямым углом
- Заменяет двигатели с прямым приводом со значительной экономией
Конструкция коробки передач
Серия GPL состоит из трех этапов:
- Цилиндрическая шестерня и шестерня : высокие передаточные числа и тихая работа
- Планетарная шпора : фиксированное передаточное число
- Коническая шпора : за весь срок службы без люфта
Особенности и преимущества
| Характеристики | Преимущества |
|---|---|
| Нулевой люфт ≤ 0.1 угл. Мин. Не увеличивается в течение срока действия GPL | Высочайшая точность для вашего применения |
| Наименьший потерянный ход ≤ 0,6 угл. Мин. | Превосходная точность даже при низком крутящем моменте |
| Расчетный срок службы 20000 часов эксплуатации | Продлевает срок службы, снижает затраты на техническое обслуживание |
| Высокая жесткость при опрокидывании и скручивании | Лучшая двухточечная точность |
| Самый низкий уровень вибрации | Превосходное управление для приложений непрерывного движения |
| Наименьший момент отрыва | Лучшая управляемость, особенно на коротких дистанциях |
| Максимальный КПД на всех скоростях> 90% | Более короткое время цикла и более низкая температура |
| Самый низкий уровень шума <65 дБ | Может работать в непосредственной близости от операторов |
| Самая низкая рабочая температура | Компоненты с увеличенным сроком службы и возможен режим S1 |
| Выходная сторона полностью закрыта | Более простой монтаж, дополнительное уплотнение не требуется |
Прямоугольный редуктор для передачи крутящего момента для робота, используемый в «умной» вспомогательной инвалидной коляске
Applied Resources является производителем Raptor, первого коммерчески доступного «умного» вспомогательного робота, одобренного Управлением по контролю за продуктами и лекарствами.Подразделение Phybotics компании Applied Resources Corp. представило роботизированную систему для инвалидных колясок Raptor в 2000 году. Raptor получил одобрение Управления по санитарному надзору за качеством пищевых продуктов и медикаментов США в декабре 1999 года и вошел в историю в июне 2000 года как первая продажа оборудования, одобренного FDA. робот-инвалидная коляска в США. Raptor также продается в Нидерландах.
Raptor оказывает помощь людям с тяжелыми формами инвалидности, использующим инвалидные коляски с электроприводом. В колене манипулятора находится прямоугольный редуктор от Torque Transmission, который обеспечивает двойной выход вала от расширенного входного вала.
Компания искала альтернативу тяжелым и дорогим металлическим коробкам передач, доступным на рынке, и обратилась за помощью в Torque Transmission. «Инженеры Torque Transmission оснастили наш стандартный RAB-1, угловой редуктор с угловой передачей под углом, специальной зубчатой передачей, чтобы обеспечить больший крутящий момент для удовлетворения требований заказчика, — пояснил Джон Рамп, президент подразделения Torque Transmission. «В результате получился недорогой, очень легкий, но надежный привод», — заключил он.
«Коробка передач с трансмиссией крутящего момента была выбрана из-за ее небольшого габарита, легкого веса и высокого крутящего момента», — отметил Крейг Вундерли, главный инженер отдела прикладных ресурсов.«Мы подвергли правильные угловые приводы строгим испытаниям, и эти приводы успешно прошли все наши испытания», — заключил он.
Угловая зубчатая передача под углом
Прямоугольный угловой редуктор (RAB) трансмиссии крутящего момента
имеет размеры 3-21 / 32 дюйма x 3-15 / 16 дюйма x 1-1 / 4 дюйма в глубину и весит 12 унций. В нем используются шарикоподшипники и шестерни из закаленной стали с экранированной смазкой, он рассчитан на 1600 об / мин, а максимальная скорость 1/3 лошадиных сил составляет 3000 об / мин. RAB передачи крутящего момента также имеет выбор из одного или двух входов и передаточное число 1: 1 или 2: 1, правую или левую конфигурацию, и может работать в любом направлении.
Основные характеристики
- Низкая стоимость. Половина стоимости сопоставимых дисков в металлическом корпусе
- Выбор материалов корпуса и вала: — Соответствует RoHos
- Доступны нестандартные зубчатые колеса, длина корпуса и вала, а также материалы
- Увеличенный срок службы
- Меньший износ
- Улучшенный контакт зубьев
- Тихая работа
- Наиболее эффективная конструкция передачи мощности в условиях номинальной нагрузки
Типичные применения прямоугольных угловых зубчатых передач передачи крутящего момента охватывают широкий спектр применений, включая медицинское и физиотерапевтическое оборудование, упаковочное оборудование или любые другие приложения, требующие малой мощности, где требуется высококачественная, но компактная, легкая и экономичная передача энергии.
Узнать больше
Torque Transmission специализируется на системах привода с дробной мощностью, но не ограничивается ими, и может работать со всеми различными скоростями и передаточными числами двигателей. В Torque Transmission инженер-конструктор не привязан к конкретной конструкции. Вы найдете команду, готовую предложить решения.
Обратитесь в компанию Torque Transmission сегодня, чтобы мы смогли найти недорогую коробку передач, соответствующую вашим потребностям и вашему бюджету.
Читатели, интересующиеся коробкой передач для роботов, заинтересованы в следующих статьях по теме:
| Планетарный поворот на 180 градусов | AM 9015, AM RedLine, BAG, CIM, Mini CIM, RS-550, RS-775, RS-775pro | 1 Двигатель | Планетарный ввод Versa | 1 Скорость | Шкив | 2: 1 | VEXproWest Coast Products |
| 2 Шаровой рычаг переключения передач CIM | CIM, Mini CIM | 2 двигателя | 1/2 «шестигранник | 2 скорости | Шпора | 3.67: 1, 5,39: 1, 6,6: 1, 8,33: 1, 9,17: 1, 11,73: 1, 12,26: 1, 15: 1, 20,83: 1, 26,67: 1 | Робот SpaceVEXproWest Coast Products |
| 3 Шаровой рычаг переключения передач CIM | CIM, Mini CIM | 2 двигателя, 3 двигателя | 1/2 «шестигранник | 2 скорости | Шпора | 2,83: 1, 4,17: 1, 5: 1, 6,13: 1, 7,08: 1, 7,5: 1, 9,01: 1, 9,07: 1, 10,42: 1, 11,03: 1, 13,5: 1, 15,32: 1, 18,75 : 1, 19.61: 1, 24: 1, 26.04: 1, 33.33: 1 | Робот SpaceVEXproWest Coast Products |
| 57 Спорт | AM 9015, AM RedLine, NeveRest, RS-550, RS-775, RS-775pro | 1 Двигатель | 1/2 «шестигранник | 1 Скорость | Планетарный | 4: 1, 12: 1, 16: 1, 20: 1, 36: 1, 48: 1, 64: 1, 80: 1, 100: 1 | ЭндиМарк |
| Armabelt Drive | RS-775, RS-775pro | 1 Двигатель | Планетарный ввод Versa | 1 Скорость | Шкив | 1.1: 1, 1.8: 1, 3: 1, 3.4: 1, 4.5: 1, 5.6: 1, 5.7: 1, 7.5: 1, 8: 1, 9: 1, 9.4: 1, 10.2: 1, 11.4: 1, 12: 1, 13.2: 1, 13.6: 1, 15: 1, 16.9: 1, 17: 1, 18.2: 1, 18.8: 1, 21: 1, 22.6: 1, 22.7: 1, 23.9: 1, 27: 1, 28.2: 1, 28.4: 1, 30: 1, 30.1: 1, 30.7: 1, 31.8: 1, 34.1: 1, 36: 1, 37.6: 1, 39.5: 1, 39.8: 1, 40.9: 1, 45: 1, 45.4: 1, 47.1: 1, 48: 1, 50.8: 1, 51.1: 1, 52.7: 1, 55.7: 1, 56.5: 1, 56.8: 1, 60: 1, 63: 1, 65.9: 1, 67.8: 1, 71.6: 1, 75: 1, 75.3: 1, 79.5: 1, 81: 1, 84: 1, 84.7: 1, 90: 1, 92: 1, 92.2: 1, 94.1: 1, 102,2: 1, 105: 1, 108: 1, 113,6: 1, 118,6: 1, 120: 1, 131.7: 1, 135: 1, 147: 1, 150: 1, 152.4: 1, 169.4: 1, 188.2: 1, 189: 1, 210: 1, 243: 1, 270: 1, 300: 1 | Армабот |
| CIM Sport | CIM, Mini CIM | 1 Двигатель | 1/2 «шестигранник | 1 Скорость | Планетарный | 4: 1, 12: 1, 16: 1, 20: 1, 36: 1, 48: 1, 64: 1, 80: 1, 100: 1 | ЭндиМарк |
| CIM-ile | AM 9015, RS-550, RS-775, RS-775pro | 1 Двигатель | 8 мм (стиль CIM) | 1 Скорость | Шпора | 9.29: 1, 12.29: 1 | Робот SpaceVEXproWest Coast Products |
| CIMple Box | CIM, Mini CIM | 2 двигателя | 1/2 «Круглый | 1 Скорость | Шпора | 4.67: 1 | ЭндиМарк |
| DeCIMate | AM RedLine | 2 двигателя | 1/2 «шестигранник | 1 Скорость | Шпора | 3,75: 1 | ЭндиМарк |
| Двойной 775 Спорт | AM Redline, RS-775, RS-775pro | 2 двигателя | 1/2 «шестигранник | 1 Скорость | Планетарный | 13: 1, 39: 1, 52: 1, 65: 1, 117: 1, 156: 1, 208: 1, 260: 1, 325: 1 | ЭндиМарк |
| EVO | CIM, Mini CIM | 2 двигателя, 3 двигателя | 1/2 «шестигранник, 1/2» круглый | 2 скорости | Шпора | 4.77: 1, 5,45: 1, 6: 1, 6,86: 1, 7,56: 1, 8,63: 1, 9,54: 1, 10,86: 1, 12: 1, 12,41: 1, 15,11: 1, 16,37: 1, 18,71: 1, 21,72: 1, 22,67: 1, 25,9: 1, 32,74: 1, 45,33: 1 | ЭндиМарк |
| Переключатель EVO для RedLine | AM RedLine | 2 двигателя, 3 двигателя, 4 двигателя | 1/2 «шестигранник | 2 скорости | Шпора | 13,58: 1, 28,33: 1 | ЭндиМарк |
| EVO Slim для RedLine | AM RedLine | 2 двигателя, 3 двигателя, 4 двигателя | 1/2 «шестигранник | 1 Скорость | Шпора | 13.58: 1, 17.71: 1, 20.46: 1, 28.33: 1 | ЭндиМарк |
| Hex Серия PG | AM 9015, RS-775, RS-775pro | 1 Двигатель | 1/2 «шестигранник, 3/8» шестигранник | 1 Скорость | Планетарный | 27: 1, 71: 1, 188: 1 | ЭндиМарк |
| Коническая коробка LJ | CIM, Mini CIM | 1 Двигатель | 1/2 «шестигранник, 3/8» шестигранник | 1 Скорость | Фаска | 1: 1, 2: 1 | ЭндиМарк |
| NeveRest Orbital 20 | NeveRest | 1 Двигатель | 6мм D | 1 Скорость | Планетарный | 19.2: 1 | ЭндиМарк |
| Планетарное устройство NeveRest | NeveRest | 1 Двигатель | 6мм D | 1 Скорость | Планетарный | 3,7: 1 | ЭндиМарк |
| NeveRest Sport | NeveRest | 1 Двигатель | 5 мм шестигранник, 6 мм D | 1 Скорость | Планетарный | 4: 1, 16: 1, 20: 1, 64: 1, 81: 1, 104: 1, 256: 1 | ЭндиМарк |
| NeveRest Spur | NeveRest | 1 Двигатель | 6мм D | 1 Скорость | Шпора | 20: 1, 40: 1, 60: 1 | ЭндиМарк |
| PG188 | AM 9015, RS-775, RS-775pro | 1 Двигатель | 10 мм | 1 Скорость | Планетарный | 188: 1 | ЭндиМарк |
| PG27 | AM 9015, RS-775, RS-775pro | 1 Двигатель | 10 мм | 1 Скорость | Планетарный | 27: 1 | ЭндиМарк |
| PG71 | AM 9015, RS-775 | 1 Двигатель | 10 мм | 1 Скорость | Планетарный | 71: 1 | ЭндиМарк |
| PI SS CIM | CIM, Mini CIM | 2 двигателя | 1/2 «шестигранник | 1 Скорость | Шпора | 12.05: 1, 15.5: 1, 17.8: 1 | Plummer Robotics |
| PI SS Triple CIM | AM Redline, RS-775, RS-775pro | 2 двигателя, 3 двигателя | 1/2 «шестигранник | 1 Скорость | Шпора | 25,8: 1, 29,6: 1, 40,5: 1 | Plummer Robotics |
| PicoBox Duo | NeveRest | 2 двигателя | 6мм D | 1 Скорость | Шпора | 1: 1, 1: 1.28, 1.28: 1 | ЭндиМарк |
| PicoBox GEO | Орбитальный мотор-редуктор NeveRest | 2 двигателя | 6мм D | 1 Скорость | Шпора | 1: 1, 1: 1,28, 1,28: 1 | ЭндиМарк |
| PicoBox LEO | Орбитальный мотор-редуктор NeveRest | 1 Двигатель | 6мм D | 1 Скорость | Шпора | 1: 1, 1: 1,28, 1,28: 1 | ЭндиМарк |
| PicoBox MEO | NeveRest | 1 Двигатель | 6мм D | 1 Скорость | Шпора | 1: 1, 1: 1.28, 1.28: 1 | ЭндиМарк |
| Турбина PicoBox | NeveRest | 1 Двигатель | 6мм D | 1 Скорость | Шпора | 1: 1, 1: 1,28, 1,28: 1 | ЭндиМарк |
| PicoBox Twin Turbo | NeveRest | 2 двигателя | 6мм D | 1 Скорость | Шпора | 1: 1, 1: 1,28, 1,28: 1 | ЭндиМарк |
| PicoBox Uno | NeveRest | 1 Двигатель | 6мм D | 1 Скорость | Шпора | 1: 1, 1: 1.28, 1.28: 1 | ЭндиМарк |
| RAW Box | CIM, Mini CIM | 2 двигателя | 1/2 «шестигранник | 1 Скорость | Червячная передача | 7,1: 1, 14,2: 1 | ЭндиМарк |
| Угловая передача | AM 9015, AM RedLine, BAG, CIM, Mini CIM, RS-550, RS-775, RS-775pro | 1 Двигатель | 3/8 дюйма, шестигранник | 1 Скорость | Фаска | 1: 1 | Армабот |
| МОМ Rocketbox | CIM, Mini CIM | 2 двигателя | 1/2 «шестигранник | 1 скорость, 2 скорости | Шпора | 5.95: 1, 7.31: 1, 8.45: 1, 10.71: 1, 12.71: 1 | ЭндиМарк |
| Редуктор с одинарным редуктором | CIM, Mini CIM | 1 Двигатель | 1/2 «шестигранник, 1/2» круглый, 3/8 «шестигранник | 1 Скорость | Шпора | 5: 1, 5,38: 1, 6: 1, 6,55: 1 | Робот SpaceVEXproWest Coast Products |
| Односкоростной, двойной редуктор | CIM, Mini CIM | 2 двигателя | 1/2 «шестигранник | 1 Скорость | Шпора | 4.17: 1, 5,67: 1, 9,52: 1 | Робот SpaceVEXproWest Coast Products |
| Односкоростной, одинарный редуктор | CIM, Mini CIM | 2 двигателя, 3 двигателя | 1/2 «шестигранник | 1 Скорость | Шпора | 5,33: 1, 6: 1, 7: 1 | Робот SpaceVEXproWest Coast Products |
| Звуковой переключатель | CIM, Mini CIM | 2 двигателя | 1/2 «шестигранник, 1/2» круглый | 2 скорости | Шпора | 3.7: 1, 4,7: 1, 5,8: 1, 6: 1, 7,3: 1, 7,5: 1, 9,4: 1, 11,8: 1, 14,8: 1, 18,6: 1, 24: 1, 30: 1 | ЭндиМарк |
| SpinBox | CIM, Mini CIM | 1 Двигатель | 1/2 «Круглый | 1 Скорость | Шпора | 1: 1,21, 1: 1,67 | ЭндиМарк |
| SR Тонкий | CIM, Mini CIM | 2 двигателя | 1/2 «Круглый | 1 Скорость | Шпора | 5: 1, 5: 45: 1 | 221 Робототехнические системы |
| SR Тонкий тройной | CIM, Mini CIM | 2 двигателя, 3 двигателя | 1/2 «Круглый | 1 Скорость | Шпора | 5: 1, 5: 45: 1 | 221 Робототехнические системы |
| Супер рычаг переключения передач | CIM, Mini CIM | 2 двигателя | 1/2 « | 2 скорости | Шпора | 6: 1, 9.4: 1, 24: 1 | ЭндиМарк |
| Super Sonic Shifter | CIM, Mini CIM | 2 двигателя, 3 двигателя | 1/2 «шестигранник | 2 скорости | Шпора | 4,5: 1, 11,4: 1 | ЭндиМарк |
| Односкоростная трансмиссия SuperLight | CIM, Mini CIM | 2 двигателя | 1/2 «Круглый | 1 Скорость | Шпора | 5,95: 1, 6.94: 1, 7,14: 1, 8,45: 1, 9,87: 1, 10,71: 1, 12,5: 1, 12,75: 1, 14,88: 1 | 221 Робототехнические системы |
| Трансмиссия SuperLight SuperShifter | CIM, Mini CIM | 2 двигателя | 1/2 «Круглый | 2 скорости | Шпора | 3,7: 1, 4,7: 1, 5,8: 1, 6: 1, 7,3: 1, 7,5: 1, 9,4: 1, 11,8: 1, 14,8: 1, 18,6: 1, 24: 1, 30: 1 | 221 Робототехнические системы |
| TB3, 3-ступенчатая коробка передач | CIM, Mini CIM, RS-550 | 2 двигателя | 1/2 «Круглый | 1 Скорость | Шпора | 33.8: 1, 42,8: 1, 51: 1 | ЭндиМарк |
| Toughbox | CIM, Mini CIM | 2 двигателя | 1/2 «Круглый | 1 Скорость | Шпора | 5,95: 1, 6,94: 1, 8,45: 1, 9,87: 1, 10,71: 1, 12,5: 1, 12,75: 1, 14,88: 1 | ЭндиМарк |
| Toughbox Micro | CIM, Mini CIM | 1 Двигатель | 1/2 «шестигранник | 1 Скорость | Шпора | 5.95: 1, 8,45: 1, 10,71: 1, 12,75: 1 | ЭндиМарк |
| Toughbox Mini | CIM, Mini CIM | 2 двигателя | 1/2 «шестигранник, 1/2» круглый | 1 Скорость | Шпора | 5,95: 1, 8,45: 1, 10,71: 1, 12,75: 1 | AndyMarkStudica |
| VersaDM | AM Redline, BAG, RS-550, RS-775, RS-775pro | 2 двигателя | Планетарный вход Versa, 1/2 дюйма, шестигранник, 3/8 дюйма, шестигранник, 8 мм (стиль CIM) | 1 Скорость | Фаска | 1: 1, 3.75: 1, 5,33: 1 | VEXWest Coast Products |
| VersaPlanetary | AM 9015, AM RedLine, BAG, CIM, Mini CIM, RS-550, RS-775, RS-775pro | 1 двигатель, 2 двигателя | 1/2 «шестигранник, 1/2» круглый, 3/8 «шестигранник, 8 мм (стиль CIM) | 1 Скорость | Планетарный | 3: 1, 4: 1, 5: 1, 7: 1, 9: 1, 10: 1, 12: 1, 15: 1, 16: 1, 20: 1, 21: 1, 25: 1, 27 : 1, 28: 1, 30: 1, 35: 1, 36: 1, 40: 1, 45: 1, 49: 1, 50: 1, 63: 1, 70: 1, 81: 1, 90: 1 , 100: 1 | Робот SpaceVEXproWest Coast Products |
| Планетарный привод Versa, 90 градусов | VersaPlanetary | 1 Двигатель | 1/2 «шестигранник, 3/8» шестигранник | 1 Скорость | Фаска | 1: 1 | VEX |
| VersaPlanetary Lite | AM 9015, AM RedLine, BAG, CIM, Mini CIM, RS-550, RS-775, RS-775pro | 1 двигатель, 2 двигателя | 1/2 «шестигранник, 1/2» круглый, 3/8 «шестигранник, 8 мм (стиль CIM) | 1 Скорость | Планетарный | 3: 1, 4: 1, 5: 1, 7: 1, 9: 1, 10: 1, 12: 1, 15: 1, 16: 1, 20: 1, 21: 1, 25: 1, 27 : 1, 28: 1, 30: 1, 35: 1, 36: 1, 40: 1, 45: 1, 49: 1, 50: 1, 63: 1, 70: 1, 81: 1, 90: 1 , 100: 1 | Робот SpaceVEXWest Coast Products |
| WCP DS | CIM, Mini CIM | 2 двигателя, 3 двигателя | 1/2 «шестигранник | 2 скорости | Шпора | 3.53: 1, 3,8: 1, 4,12: 1, 4,4: 1, 4,49: 1, 4,74: 1, 5,13: 1, 5,6: 1, 6,25: 1, 6,73: 1, 7,29: 1, 7,95: 1, 12,85: 1, 13,85: 1, 15: 1, 16,36: 1 | Робот SpaceVEXproWest Coast Products |
| WCP SS | CIM, Mini CIM | 2 двигателя, 3 двигателя | 1/2 «шестигранник | 1 Скорость | Шпора | 4,2: 1, 4,29: 1, 4,52: 1, 4,9: 1, 5,23: 1, 5,35: 1, 5,64: 1, 6,11: 1, 6,67: 1, 7,44: 1, 8,01: 1, 8,68: 1, 9,45 : 1, 9,64: 1, 10,38: 1, 11,25: 1, 12.27: 1, 15.31: 1, 16.48: 1, 17.86: 1, 19.48: 1 | Робот SpaceVEXproWest Coast Products |
Коробка передач для робототехники | Компания RTP
Пример использования для конечного использования
- Композит из очень длинных волокон снижает вес, сохраняя при этом прочность для коробки передач робототехники
В качестве наставника-волонтера на соревнованиях по робототехнике FIRST® Энди Бейкер увидел большие различия между командами — не в талантах, а в доступе к ресурсам, которые помогли бы им воплотить свои идеи в жизнь.FIRST — это некоммерческая организация, которая помогает студентам развивать научные и инженерные навыки, создавая собственных роботов, используемых для борьбы за стипендии.
«Не у всех был близлежащий магазин хобби по робототехнике, где они могли найти или изготовить детали, которые они себе представляют. Те, кто этого не сделал, оказались в невыгодном положении », — сказал Бейкер.
Увидев возможность помочь программе, Бейкер и Марк Коорс, также являющиеся наставниками ПЕРВЫХ, основали AndyMark, Inc., чтобы обеспечить универсальный магазин специализированных деталей для роботов, а также всего остального, необходимого разработчикам роботов.Теперь растущая компания проводит соревнования FIRST, а также аналогичные соревнования для «ботов» вместе с любителями по всему миру.
Поскольку компания AndyMark основана на инновациях, основатели часто изучают свой каталог компонентов в поисках компонентов, которые можно улучшить. Недавно их внимание привлек алюминиевый комплект коробки передач. Бейкер, квалифицированный инженер-механик, считал, что корпус может быть изготовлен из армированного пластика, что означает меньшее количество деталей для облегчения сборки учащимися, а также меньший вес и повышенную долговечность.
«Вес — это святой Грааль на этих соревнованиях», — отметил Бейкер. «Каждый старается разместить на своем роботе как можно больше вещей, не превышающих установленный предел веса».
Зная репутацию компании RTP по предыдущей работе, Бейкер поручил инженерам компании работать над решением. Результатом стал переработанный дизайн, ориентированный на материалы, в результате которого появилась новая коробка передач с меньшим количеством деталей, более надежной сборкой, превосходной прочностью и, что самое главное, легче на полфунта (1/4 кг).
Далее новый комплект стоит примерно столько же, сколько старый, что немало для AndyMark.«Эти дети часто проводят распродажу выпечки, чтобы заработать необходимые средства; мы хотим удерживать наши цены на минимально возможном уровне », — сказал Бейкер.
В качестве материала использован нейлон 6/6, армированный очень длинными волокнами серии RTP 200. Сначала он использовался в коробке передач Toughbox Mini от AndyMark, а затем в коробке передач CIMpleBox, которая в этом сезоне стала стандартной коробкой передач для всех комплектов роботов FIRST — более 2000 команд использовали ее без единой поломки.
«Мы поговорили со многими строителями и услышали только положительные отзывы о новых проектах», — сказал Бейкер.
Партнерство с заказным компаундером с полным спектром услуг сыграло важную роль в успехе переработанных коробок передач. «Компания RTP предоставила нам огромную техническую поддержку, их инженеры CAE провели анализ потока и исследования деформации различных материалов под нагрузкой, чтобы помочь нам найти лучшее решение», — сказал Бейкер. «Сейчас мы работаем с ними над редизайном третьей части и надеемся на дальнейшую совместную работу в будущем».
Основанная в 2004 году, AndyMark, Inc.из Кокомо, Индиана, изобретает и конструирует компоненты для робототехники и мобильных приложений. Для получения дополнительной информации посетите их веб-сайт www.andymark.com. Чтобы узнать о FIRST, посетите www.usfirst.org.
Высокоточный редуктор для робототехники Melior Motion
Прецизионные редукторы с низким люфтом:
Узлы PSC-V / H-E серии meliormotion®
Melior Motion предлагает высокоточные редукторы, которые при люфте ≤ 0,1 угл. Мин. Считаются беззазорными.Благодаря нашему запатентованному решению для регулирования износа мы гарантируем, что он не изменится в течение всего срока службы.
Прецизионные редукторы с низким люфтом — эффективные и надежные
Большую безопасность для вашего применения обеспечивают редукторы с низким люфтом, благодаря высокой мощности, ускорению и моментам аварийной остановки. Наша серия коробок передач отличается исключительно высокой жесткостью на опрокидывание и скручивание. Это обеспечивает точное позиционирование прямо к точке.
Редукторы и элементы привода
Наши прецизионные редукторы с низким люфтом достигают особенно высокого уровня производительности благодаря одновременному включению нескольких зубьев (солнечная шестерня, планетарная шестерня и коронная шестерня).КПД> 90% и чрезвычайно низкий момент отрыва обеспечивают выдающуюся энергоэффективность. Благодаря высокому КПД температура трансмиссии остается постоянно низкой, что продлевает срок службы сальников, компонентов трансмиссии и смазки.
Результат — впечатляющий срок службы — 20 000 часов. Это намного больше, чем возможно с другими конструкциями прецизионных редукторов, и это было подтверждено многочисленными испытаниями.
В то же время уникальная конструкция нашего прецизионного редуктора с низким люфтом обеспечивает чрезвычайно тихую работу.Таким образом снижается уровень шума в рабочей среде.
Не только тихие, но и точные, узлы эффективно работают даже при низком крутящем моменте, что позволяет точно контролировать небольшие движения.
Редукторы с полым валом для прокладки кабеля
Полые валы диаметром до 75 мм позволяют, например, прокладывать линии передачи данных или питания.
Конструкция зубчатой передачи наших продуктов позволяет использовать стандартные трансмиссионные масла, а также подходит для использования со смазкой, совместимой с пищевыми продуктами.
Подузлы PSC-V / H-E также подходят в качестве высокоточных редукторов с выходным фланцем для ваших узкоспециализированных применений.
- Диапазон крутящего момента 400 — 4500 Нм
- Наружный диаметр 180-329 мм
- Диапазон соотношений: 35: 1 — 200: 1
Подузлы PSC-V / H-E
Комплексная конструкция
Применение подузлов PSC обычно используется в робототехнике, где соединение с двигателем может быть включено в конструкцию манипулятора робота для оптимизации пространства и затрат.
Другие области применения этого варианта конструкции можно найти в автоматизации, станках, полиграфической промышленности, упаковочных машинах, поворотных столах, медицинской технике и т. Д.
.