Где найти кан шину Lada Priora (2172,2171)
Для Lada Priora, 2013 — 2020 (2172)
CAN-A
ВАРИАНТ 1
Диагностический разъем OBD-II.
LIN-AB
ВАРИАНТ 1
Жгут двери водителя. В разрыв сине-белого провода.
Для Lada Priora, 2007 — 2013 (2171)
LIN-AB
ВАРИАНТ 1
Жгут двери водителя. В разрыв сине-белого провода.
ВАРИАНТ 2
Разъём X3 блока BCM. В разрыв сине-белого провода.Блок BCM располагается в центральной консоли, за пластиковой накладкой у педали газа.
ПОИСКОВЫЕ ТЕГИ: приора, can, lada, can шина, кан шина, лада, lada priora, прошивка магнитолы, priora, диагностика, приора2, ммс 2190, гранта, калина, прошивка, калина 2, лада приора, ммс, авто, starline, диагностика авто, автодиагностика, приора 2, приборов, ваз, can-шина, elm327, сингл меню, фсо, obd2, веста, установка щитка приора 2 в приору 1, установка сигнализации, опера, бункер, тонировка, автоваз, доработка щитка приора 2, кан, приора люкс, new menu, singl menu, гранта люкс, лада гранта, gamma, ремонт, нью меню, установка альт меню, доработка индикации поворотника приора 2, щиток от приора 2 люкс, круиз контроль на приора 1, прошивка can, kalina, прошивка кан, прошивка ммс 2190, пересвет щитка приора 2, панель, лада калина магнитола, лада спорт, магнитола, обзор, лада калина ммс, калина ммс, гранта ммс, can hacker, прошивка магнитолы гранта, прошивка магнитолы калины, таз, новая приора, lin, kkl адаптер, установка навигации, диагностика ваз, угон, lin bus, приора 2020, установка торпеды на приору, штатный дисплей, приора автозвук, лада гранта люкс, торпеда на приору, снятие торпеды на приору, single, дополнительная информация, самсунг, автозвук, can-spi board, drpopov can-spi board, ceed, kurskcartuning, иммобилайзер, программирование автомобилей, чип-тюнинг лада приора, чип-тюнинг в курске, 21127, bosch 17.
 9.7, козырек приора первая торпеда планшет в приору, удаление иммо, чип-тюнинг приора в курске, универсальная плата, 17.9.7, obd, парктроник, gamma sport, приборная панель, can bus, kia, mazda, приборная панель gamma sport, не подключаеся елм327, отзывы motorring, интернет-магазин тюнинга, motorring, моторринг, тюнинг, цифровой индикатор, температура двигателя, компьютерная диагностика ваз, компьютерная диагностика, к линия, икс рей, тюнинг лада, тюнинг ваз, lada granta, automotive databus, canhacker, can-hacker, lada lin, лада шина lin, видеоблог, канхакер, кан хакер, can хакер, диагностика гранта, диагностика приора, vag kkl, elm 327, диагностика автомобиля, адаптер, сенс, torque, сканер, инжектор, своими руками, k line, эбу, k-line, шнур для диагностики, адаптеры для диагностики, стандарты диагностики, колодка диагностики, программа диагностики, ремонт ваз, n7100, как проверить к-линию, к-линия, автомеханик, диагностика k-line elm327 эбу автодиагностика адаптер диагностика автомобиля, казань, опер стайл, штампы, сгу, химчистка, мойка движка, съёмная тонировка, чистка форсунок, vesta, новая, lada vesta, лада веста, сеть 88, покупка приоры, свап, включение, зажигание, стрелки, пробег, расход, не работает, бензонасос, как заменить, змз 409, 409, змз про, ммс лада веста, веста спорт, spro, teyes, магнитолы, полная, навигатор, проблемы ммс веста, lada club, 88, чип тюнинг, lada club by, granta, скин, полная прошивка ммс веста, сравнение, tuning, итэлма, прошивки, панели, ситигид, люкс престиж, обновить, ммс веста, музыка, ошибки двигателя, фильтр, свечи, змз, 405, замена, мотор, электрика, умз, 4216, дешёвый, причины, canbus, качество, хороший, бизнес, газель, устанавливаем сигнализацию, автоэлектрика, starline a 93, a 93, cr-v, пнтк, гаражмонтаж, газ, двигатель, реальный пробег лада приора, как проверить пробег на лада приора, печка, холодный, датчик, работа, большой, обороты, температура, блок, давление, система, топливо, вода, бензин, аккумулятор, предохранитель, генератор, зарядка, разъем, провода, плохо, ток, слабый, вентилятор, фонари, реле, масса, сигализации, lada priora automobile model, profi+, диагностика обучение, profiplus, учебный центр профиплюс, обучение диагностов в астане, каншина, electude, что такое кан модуль, как разобрать щито, как проверить, симулятор, курсы автоэлектриков в астане, автомобиль ремонт, кан-шина, прошивка can шины ммс 2190, приборка щитка приора 2 в приору 1, прошивка щитка приора 2, прошивка кан-шины, ммс 2192, can lin, прошивка кан шины, прошивка can шины, ммс лада гранта, can-модуль, кан модуль, автоэлектрик, угона нет, противоугонка, защита от угона, угона.
9.7, козырек приора первая торпеда планшет в приору, удаление иммо, чип-тюнинг приора в курске, универсальная плата, 17.9.7, obd, парктроник, gamma sport, приборная панель, can bus, kia, mazda, приборная панель gamma sport, не подключаеся елм327, отзывы motorring, интернет-магазин тюнинга, motorring, моторринг, тюнинг, цифровой индикатор, температура двигателя, компьютерная диагностика ваз, компьютерная диагностика, к линия, икс рей, тюнинг лада, тюнинг ваз, lada granta, automotive databus, canhacker, can-hacker, lada lin, лада шина lin, видеоблог, канхакер, кан хакер, can хакер, диагностика гранта, диагностика приора, vag kkl, elm 327, диагностика автомобиля, адаптер, сенс, torque, сканер, инжектор, своими руками, k line, эбу, k-line, шнур для диагностики, адаптеры для диагностики, стандарты диагностики, колодка диагностики, программа диагностики, ремонт ваз, n7100, как проверить к-линию, к-линия, автомеханик, диагностика k-line elm327 эбу автодиагностика адаптер диагностика автомобиля, казань, опер стайл, штампы, сгу, химчистка, мойка движка, съёмная тонировка, чистка форсунок, vesta, новая, lada vesta, лада веста, сеть 88, покупка приоры, свап, включение, зажигание, стрелки, пробег, расход, не работает, бензонасос, как заменить, змз 409, 409, змз про, ммс лада веста, веста спорт, spro, teyes, магнитолы, полная, навигатор, проблемы ммс веста, lada club, 88, чип тюнинг, lada club by, granta, скин, полная прошивка ммс веста, сравнение, tuning, итэлма, прошивки, панели, ситигид, люкс престиж, обновить, ммс веста, музыка, ошибки двигателя, фильтр, свечи, змз, 405, замена, мотор, электрика, умз, 4216, дешёвый, причины, canbus, качество, хороший, бизнес, газель, устанавливаем сигнализацию, автоэлектрика, starline a 93, a 93, cr-v, пнтк, гаражмонтаж, газ, двигатель, реальный пробег лада приора, как проверить пробег на лада приора, печка, холодный, датчик, работа, большой, обороты, температура, блок, давление, система, топливо, вода, бензин, аккумулятор, предохранитель, генератор, зарядка, разъем, провода, плохо, ток, слабый, вентилятор, фонари, реле, масса, сигализации, lada priora automobile model, profi+, диагностика обучение, profiplus, учебный центр профиплюс, обучение диагностов в астане, каншина, electude, что такое кан модуль, как разобрать щито, как проверить, симулятор, курсы автоэлектриков в астане, автомобиль ремонт, кан-шина, прошивка can шины ммс 2190, приборка щитка приора 2 в приору 1, прошивка щитка приора 2, прошивка кан-шины, ммс 2192, can lin, прошивка кан шины, прошивка can шины, ммс лада гранта, can-модуль, кан модуль, автоэлектрик, угона нет, противоугонка, защита от угона, угона. нет, установка сигнализации +на приору, навигация, 9677611460, starline a93, установка сигнализации лада приора +своими руками, автомобиль, starline s96 2can 2lin gsm, самара, +79677611460, 2can2lin, starline а93 2can2lin, сигнализации с автозапуском, хит авто, сигнализация, старлайн, автозапуск, установка сигнализации своими руками, установка и доработка комбинации щитка приборов приора 2 fl в приору 1, как разобрать щиток приора 2, как работает кан шина, что такое кан шина, калина спорт, панель гранта, панель калина, авторемонт, авторемонт45, автотема, электроника автомобиля, устройство кан шины, как проверить кан шину, снять панель гранта, снять ммс, не работает стрелка, лада приора 2012г, приборка лада приора, приборка ваз, не работает стрелка на приборке, зависает стрелка приборки на приоре, разборка панели гранта, разборка панели калина, новое, не работает стрелка температуры на приоре, ремонт авто, курсы диагностики, панель приборов приора 2 люкс, как снять панель приора 2, панель от приоры 2 на приору 1, панель приборов приора 2 цена, панель приора 2 на приору 1, панель приора 2 люкс, panel, на ваз, приборная, avtovaz, панель приора 2 на приору 1 установка, приборная панель приора 2, electronics, шина кан принцип работы, шина кан, шина can, install, панель приора 2, приборная панель на приору 2, панель приборов на приору 2, панель лада приора, щиток приборов приора, тюнинг салона, на приоре, новая приборка приора, щиток приора, приборка с калины2, приборка с приоры2, новая приборка, панель приора тюнинг, приора щиток тюнинг, новая приборная панель, панель приборов, комбинация приборов, приборка новой приоры, 2194, 2192, singlemenu, см, синглменю, меню, установка, установка меню, 2190, штатная магнитола, sm 6.
нет, установка сигнализации +на приору, навигация, 9677611460, starline a93, установка сигнализации лада приора +своими руками, автомобиль, starline s96 2can 2lin gsm, самара, +79677611460, 2can2lin, starline а93 2can2lin, сигнализации с автозапуском, хит авто, сигнализация, старлайн, автозапуск, установка сигнализации своими руками, установка и доработка комбинации щитка приборов приора 2 fl в приору 1, как разобрать щиток приора 2, как работает кан шина, что такое кан шина, калина спорт, панель гранта, панель калина, авторемонт, авторемонт45, автотема, электроника автомобиля, устройство кан шины, как проверить кан шину, снять панель гранта, снять ммс, не работает стрелка, лада приора 2012г, приборка лада приора, приборка ваз, не работает стрелка на приборке, зависает стрелка приборки на приоре, разборка панели гранта, разборка панели калина, новое, не работает стрелка температуры на приоре, ремонт авто, курсы диагностики, панель приборов приора 2 люкс, как снять панель приора 2, панель от приоры 2 на приору 1, панель приборов приора 2 цена, панель приора 2 на приору 1, панель приора 2 люкс, panel, на ваз, приборная, avtovaz, панель приора 2 на приору 1 установка, приборная панель приора 2, electronics, шина кан принцип работы, шина кан, шина can, install, панель приора 2, приборная панель на приору 2, панель приборов на приору 2, панель лада приора, щиток приборов приора, тюнинг салона, на приоре, новая приборка приора, щиток приора, приборка с калины2, приборка с приоры2, новая приборка, панель приора тюнинг, приора щиток тюнинг, новая приборная панель, панель приборов, комбинация приборов, приборка новой приоры, 2194, 2192, singlemenu, см, синглменю, меню, установка, установка меню, 2190, штатная магнитола, sm 6. 4, установка синглменю, обновить приору, auto show event, чернаяприора, антихром, блэкэдишн, приорабункер, опер, оперстайл, шина lin, linbus, оперская, вспышки, новая лада приора, лада приора хэтчбек, приборка от приоры 2 на приору 1, приборка приора 2 на приору 1, приборка приора 2, приборка приора 2 на приору, приборка от приоры 2, лада приора 2, приора универсал, ваз приора, купить лада приора, купить приору, сингл, прошивка калина 2, скрытые функции, функции 2020, тазы, абрам тв, наш гараж, 2020 год, скрытые функции в приоре, защита от царапин стекл авто, защита автостекл, скрытые функции в авто, скрытые функции в гранте, ютуб хата, автоблогер, na priore, evgen street, евген стрит, черная приора, priora black, cars, автоблог, ютубер, автомобобили, auto, скрытые функции в машине, гранта 2020, ваз 21099 бпа, резнчиенко, черкесск, дагестан, сергей, клим, прошивка калина, 6.4, 1.10, калина2, торпеда ри феруум, ваз 2109тюнинг, стайл, веста новая, лада 2020, все для автомобиля, мусора, ти даг, восстановили, ваз 2109, тонер, закатали, lin шина
4, установка синглменю, обновить приору, auto show event, чернаяприора, антихром, блэкэдишн, приорабункер, опер, оперстайл, шина lin, linbus, оперская, вспышки, новая лада приора, лада приора хэтчбек, приборка от приоры 2 на приору 1, приборка приора 2 на приору 1, приборка приора 2, приборка приора 2 на приору, приборка от приоры 2, лада приора 2, приора универсал, ваз приора, купить лада приора, купить приору, сингл, прошивка калина 2, скрытые функции, функции 2020, тазы, абрам тв, наш гараж, 2020 год, скрытые функции в приоре, защита от царапин стекл авто, защита автостекл, скрытые функции в авто, скрытые функции в гранте, ютуб хата, автоблогер, na priore, evgen street, евген стрит, черная приора, priora black, cars, автоблог, ютубер, автомобобили, auto, скрытые функции в машине, гранта 2020, ваз 21099 бпа, резнчиенко, черкесск, дагестан, сергей, клим, прошивка калина, 6.4, 1.10, калина2, торпеда ри феруум, ваз 2109тюнинг, стайл, веста новая, лада 2020, все для автомобиля, мусора, ти даг, восстановили, ваз 2109, тонер, закатали, lin шина
Что такое CAN шина на Приоре?
CAN-шина обеспечивает подключение любых устройств, которые могут одновременно принимать и передавать цифровую информацию (дуплексная система). Собственно шины представляет собой витую пару. … По такой шине обеспечивается достаточно высокая скорость передачи данных.
Собственно шины представляет собой витую пару. … По такой шине обеспечивается достаточно высокая скорость передачи данных.
Где находится CAN шина на Приоре?
В отечественном автомобилестроении КАН-шина получила распространение только последнее время на ВАЗ-2170 Приора. Она соединяет блок водительской двери, блок сигнализации и блок управления электропакетом.
Что такое CAN шина автомобиля?
Итак, CAN-шина — это система цифровой связи и управления электрическими устройствами автомобиля, позволяющая собирать данные от всех устройств, обмениваться информацией между ними, управлять ими.
Как узнать есть ли у меня CAN шина?
Выключить зажигание, снять клемму аккумуляторной батареи. Измерить сопротивление между проводниками. Если оно будет стремиться к нулю, значит, в шине присутствует короткое замыкание, если к бесконечности – обрыв.
Как работает CAN интерфейс?
Как работает CAN шина
Принцип её действия заключается в передаче сообщений между разными компонентами электронной системы. Для передачи разной информации в сообщения включаются идентификаторы. Они уникальны и сообщают, например, что в конкретный момент времени автомобиль едет со скоростью 60 км/ч.
Для передачи разной информации в сообщения включаются идентификаторы. Они уникальны и сообщают, например, что в конкретный момент времени автомобиль едет со скоростью 60 км/ч.
Для чего нужна CAN шина?
Controller Area Network (CAN) — стандарт промышленной сети, ориентированный на объединение различных датчиков и устройств в единую сеть. … Благодаря шине CAN в современных автомобилях может быть реализовано множество функций: доводчик стекол, электрорегулировка сидений, электронное управление багажником и многое другое.
Какое напряжение на кан шине?
В исходном состоянии шины на обоих проводах поддерживается постоянное напряжение на определенном (базовом) уровне. Для шины CAN силового агрегата оно приблизительно равняется 2.5 вольта.
Для чего нужен CAN bus?
Универсальный CAN-BUS адаптер для магнитолы:
Этот простой кан адаптер подключается к большинству автомобилей с CAN-шиной и выдает сигнал ACC для подключения магнитолы. Его удобно использовать тогда когда вам просто нужно решить проблему разрядки аккумулятора из-за неправильно подключенной магнитолы.
Что такое CAN шина на сигнализации?
CAN шина позволяет соединить между собой любое количество датчиков, контроллеров, исполнительных элементов и прочих блоков, находящихся в автомобиле (например: системы ABS,SRS AIRBAG, ESP, иммобилайзер, блок управления двигателем, климат, КПП, центральный замок, свет, подвеска, приборная панель и т.
Какое сопротивление Кан шины?
Для шины CAN требуется нагрузочное сопротивление 120 Ом. Шина без нагрузочного сопротивления снижает качество сигналов (верхняя часть).
Что такое CAN и LIN шина?
Шина LIN – это простая последовательная однопроводная шина для автомобильных применений и используется в тех случаях когда применение CAN шины – дорого. … Для изучения шины LIN Вы можете использовать наш адаптер CAN-Hacker 3.0 с дополнительной опцией LIN анализатора.
возможности и инструкция подключения к автосигнализации своими руками
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки, усложнение автомобильного электрооборудование привело к логичному решению – внедрению единой линии, к которой подсоединены электронные устройства, пишет marik174 в сообществе лада приора (lada priora club), материал подготовлен автором проекта автобурум, can шина является одним из устройств, обеспечивающих возможность более упрощенной установки противоугонной системы в автомобиле, шина can-bus была создана в конце 80-х годов фирмой robert bosch gmbh (германия) как решение для распределенных систем, работающих в режиме реального времени, чтобы связно и гармонично управлять системами, обеспечить качество и функциональность передачи данных, многие автомобилестроительные компании приме
Где находится CAN-шина?
Модуль CAN в машине являет собой сеть датчиков и контроллеров, которые предназначены для объединения всех управляющих устройств в одну систему.
Эта автомобильная технология используется как колодка, с которой можно соединять следующие управляющие блоки:
- «сигналки» — к противоугонной системе может подключаться модуль автоматического запуска двигателя;
- антиблокировочной системы «АБС»;
- механизмов безопасности, в частности, подушек и их датчиков;
- системы управления силовым агрегатом автомобиля;
- приборной комбинации;
- системы круиз-контроля;
- кондиционера и отопительного узла;
- системы управления автоматической трансмиссией и т. д.
CAN-модуль — это устройство, место монтажа которого может отличаться производителем транспортного средства.
Если неизвестно, где расположен интерфейс, этот момент уточняется в сервисной документации к авто, он обычно устанавливается:
- под капотом автомобиля;
- в салоне транспортного средства;
- под контрольной комбинацией.
Что такое CAN шина в машине
Тем автомобилистам, которые хотят узнать, что это такое, не стоит обращаться к каталогам зимней или летней резины. Рекомендуем углубить свои знания в электронике.
Рекомендуем углубить свои знания в электронике.
CAN шина автомобиля – это часть электронной системы автомобиля, предназначенная для быстрого мониторинга технического состояния транспортного средства в целом и отдельных его элементов и систем.
В машину CAN-шина монтируется для объединения датчиков и процессоров в единую информационную сеть, помогающую синхронизации команд и обработке информации. Благодаря ей происходит сбор данных и мгновенный обмен ими. За счет параллельного подключения обеспечивается возможность корректировки отправляемых сигналов для систем или узлов через датчики на лету.
CAN является аббревиатурой и расшифровывается как Controller Area Network, что может переводиться как «сеть из контроллеров». Фактически шина занимается приемом информации от расположенных вокруг устройств и отправкой данных на такие устройства. Разработка и первые внедрения стандарта проводились еще более трех десятилетий назад.
Технические характеристики
Описание основных свойств системы диагностики и анализа CAN:
- общая скорость технологии при передаче пакетных данных варьируется в районе 1 мб/с;
- если информация передается между блоками управления, то скорость отправки составит около 500 кб/с;
- при функционировании устройства в режиме «Комфорт» передача данных осуществляется при 100 кб/с.


Устройство шины и где располагается
Визуально CAN является блоком из пластика, внутри которого располагаются печатные платы. С внешней стороны шины чаще всего находится универсальный разъем, предназначенный для подсоединения различных кабелей.
За цифровой интерфейс отвечают встроенные проводники, которые принято называть CAN. Подключение осуществляется через специальный кабель.
В разных марках автомобилей шины расположены могут быть в разных местах. Конкретную область, где вмонтирован блок, можно узнать из инструкции по эксплуатации автомобиля. Чаще всего такую электронику располагают в салоне транспортного средства, скрывая ее контрольным щитом. В некоторых брендах принято устанавливать электронный узел в подкапотной области.
Назначение и функции кан-шины
Если правильно устанавливать и выполнять подсоединение проводов к интерфейсу, то можно обеспечить следующие опции:
- уменьшение параметра воздействия внешних помех на функционирование основных и дополнительных механизмов и узлов;
- возможность выполнить соединение и настраивать любые электронные приборы, в том числе охранные комплексы;
- простой принцип подключения и функционирования дополнительных электронных устройств и приборов, которые имеются в авто;
- более быстрая процедура передачи информации на определенное оборудование и механизмы авто;
- возможность отправки и получения цифровых данных одновременно, а также анализ информации;
- оперативная настройка и подключение опции дистанционного пуска ДВС.
Подробнее о назначении и общих характеристиках CAN-модуля рассказал канал «Crossover 159».
Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.
Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем. Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
Видео «Диагностика авто с помощью CAN шины»
//www.youtube.com/embed/6awrwsCX24U?rel=0&controls=0&showinfo=0
Работа с терминалом
Перед эксплуатацией надо учесть рекомендации по использованию, которые указываются в сервисном руководстве. Предварительно производится настройка устройства.
Варианты настройки
Если используется терминал, есть два варианта настроить работу интерфейса:
- С помощью специальной программы «Конфигуратор» для компьютера. При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.
- Используя команды «CanRegime». Обычно этот вариант применяется для дистанционной настройки с использованием СМС-сообщений. Могут применяться команды, которые отправляются из программного обеспечения для мониторинга.
 При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.
При запуске утилиты надо перейти во вкладку «Настройки» и выбрать пункт CAN. В открывшемся окне указываются необходимые параметры.Подробнее о командах, которые указываются после CanRegime:
- Mode — определяет режим функционирования. Если показана цифра 0 — то цифровой интерфейс отключен, если 1 — используется стандартный фильтр. Цифры 2 и 3 указывают на принадлежность пакетов к 29- либо 11-битному классу.
- BaudRate. Команда предназначена для определения скорости работы цифрового интерфейса. Важно, чтобы этот параметр соответствовал скорости передачи информации в авто.
- TimeOut — определяет время ожидания для каждого сообщения. Если полученная величина слишком низкая, то цифровой интерфейс сможет отловить не все передающиеся сообщения.

Типы сообщений
Протоколом предусматривается использование при обмене информацией посредством шины CAN четырех типов команд.
- Data Frame. Такой тип сообщений (фреймов) передает сигналы с определенным идентификатором.
- Error Frame представляет собой сообщение сбоя в процессе обмена. Он предлагает повторить действия сначала.
- Overload Frame. Послание появляется в момент необходимости перезапустить работу контроллера.
- Request Frame Remout Transmission обозначает запрос данных, где именно находится идентификатор.
I – CAN-шина;
II – резистор сопротивления;
III – интерфейс.
В процессе приема-передачи информации на проведение одной операции отводится определенное время. Если оно вышло, формируется фрейм ошибки. Error Frame также длится определенное количество времени. Неисправный блок автоматически отключается от шины при накоплении большого количества ошибок.
Функциональность системы
Команда состоит из 3 разделов: имени, значения события, времени наблюдения за переменной величиной.
Ключевое значение придается переменной показателя. Если в сообщении нет данных о времени, тогда это сообщение принимается системой по факту его получения.
Когда компьютер коммуникационной системы запрашивает показатель состояния параметра, он посылается в приоритетной очередности.
Контроллеры CANNY
Это целое семейство специализированных контроллеров, имеющих встроенную «родную» поддержку работы с шиной CAN. Это касается как «железной» части, так и поддержки на уровне «софта».
Флагманом линейки является контроллер CANNY 7, наиболее мощный и имеющий максимум возможностей. Большое количество памяти, мощные выходы, позволяющие напрямую управлять реле автомобиля, интеллектуальная система защиты от коротких замыканий, защита от бросков тока и напряжения в бортовой сети автомобиля — всё это делает этот контроллер отличным решением для воплощения любых ваших идей и проектов.
Кроме CANNY 7 в линейке контроллеров присутствует ещё несколько моделей, мы будем проводить свои эксперименты с более простой встраиваемой моделью CANNY 5 Nano.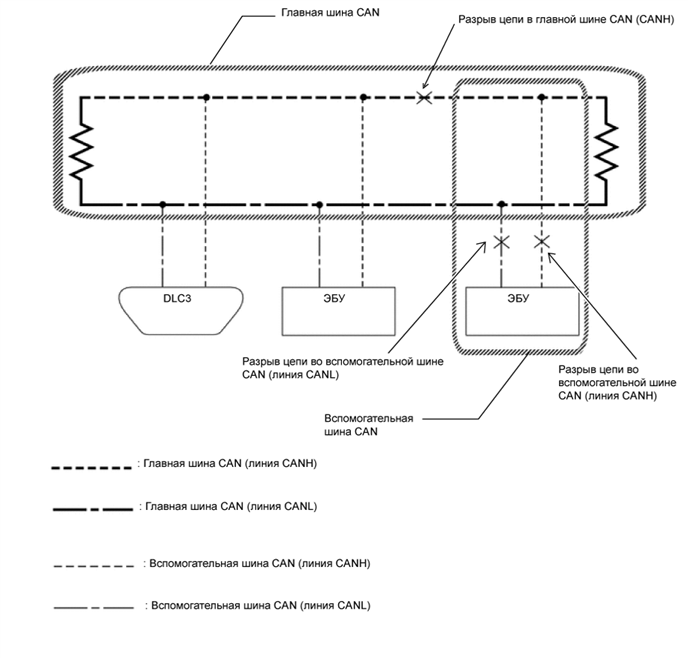 Она также поддерживает работу с CAN шиной, но при этом похожа на уже знакомую нам Arduino Nano.
Она также поддерживает работу с CAN шиной, но при этом похожа на уже знакомую нам Arduino Nano.
Видео «Ремонт CAN-интерфейса своими руками»
Пользователь Roman Brock рассказал о процедуре восстановления шины приборной панели в автомобиле Форд Фокус 2 рестайлинг.
Загрузка …
У Вас остались вопросы? Специалисты и читатели сайта AUTODVIG помогут вам,
задать вопрос
Оценить пользу статьи:
(
7
голос(ов), среднее:
4,57
из 5)
Загрузка…
Скачать бесплатно инструкцию по установке и пользованию в формате PDF
Загрузить сервисное руководство по монтажу и эксплуатации по ссылкам в таблице.
Физические составляющие
Устройство шины состоит, помимо кабеля, из нескольких элементов.
Микросхемы приемопередатчика часто встречаются от компании Philips, а также Siliconix, Bosch, Infineon.
Для этого на конец проводников устанавливаются резисторы сопротивления по 120 Ом.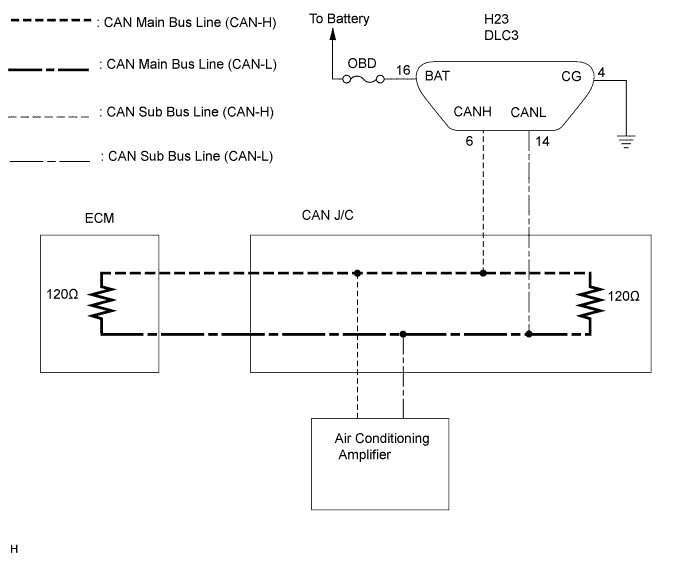 Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Это необходимо, дабы устранить отражения сообщения на конце шины и убедиться, что она получает соответствующие уровни тока.
Сам проводник в зависимости от конструкции может быть экранированным или неэкранированным. Концевое сопротивление может отходить от классического и находиться в диапазоне от 108 до 132 Ом.
Скорость передачи данных CAN-шины
Все составляющие сети CAN должны иметь единую скорость передачи информации. Однако данный стандарт не задает одного определенного параметра, ограничиваясь лишь максимальным пределом – 1Мбит/с. Изменения объема передаваемого кадра должно успеть распространиться по всей длине сети, что ставит в обратную зависимость скорости от протяженности – чем длиннее провод, тем ниже скорость. Для передачи 1Мбита за 1секунду нужная длина должна составлять не менее 40 метров. Добавьте к этому объективные факторы, снижающие скорость – защита от помех и разветвленная сеть, где происходят множественные отражения сигнала.
В угоду ускорения процесса разработчики уменьшают протяженность проводов, одновременно увеличивая число цепей с возможностью подключения большего количества приборов.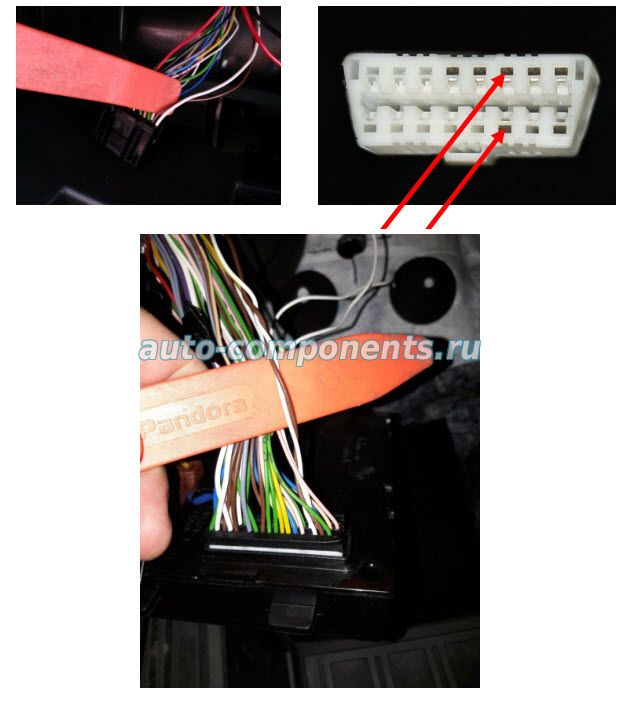 Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две цепи или более.
Например, общая длина шины, составляющая 10 метров, способна пропускать через себя кадры, со скоростью 2 Мбит/c, с 64 подключенными приборами. Если автомобиль снабжен большим числом электрооборудования, то добавляется одна, две цепи или более.
Сколько стоит?
Примерные цены на покупку КАН-устройств приведены в таблице.
| Наименование | Цена, руб |
| CAN-шина | 2000-5000 |
| Цена актуальная для трех регионов: Москва, Челябинск, Краснодар. |
Видео «Работа с CAN-шиной»
Канал «CAN-Hacker Automotive Data Bus Sollutions» показал способ работы с цифровым интерфейсом на примере автомобиля Рено Каптюр.
Ошибка U0001 — линии High шины CAN
8 744
Ошибка U0001 -ошибка линии High шины CAN (высокоскоростная
линия CAN шины)
Современные
автомобили оснащены большим количеством блоков управления (компьютеров).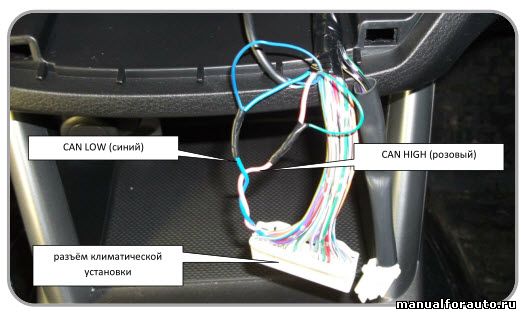 Эти блоки
Эти блоки
взаимодействуют друг с другом по шине данных, которая называется сетью
контроллеров (CAN). CAN — это двухпроводная шина, состоящая из CAN High и CAN
low. CAN High — имеет высокую скорость передачи данных 500 Кбит/сек. CAN low —
с низкой скоростью передачи данных с 125k бит/сек. Передача информации между
двумя шинами осуществляется модулем шлюза.
Код ошибки U0001
указывает на наличие проблемы с шиной CAN High.
Симптомы ошибки U0001
- Горит
индикатор «Check Engine» - Наличие
второго кода ошибки, указывающий на неисправный модуль - Проблемы
с автомобилем варьируются от состояния «не заводится» до неработающего
кондиционера, в зависимости от того, какой модуль(и) не взаимодействуют.
Причины ошибки U0001
Ошибка U0001
обычно вызвана одним из следующих факторов:
- Неисправный
модуль управления - Проблема
с CAN шиной
Как диагностировать и устранять ошибку U0074
Выполнить предварительную проверку
Иногда U0001
может периодически появляться в результате разряженного аккумулятора.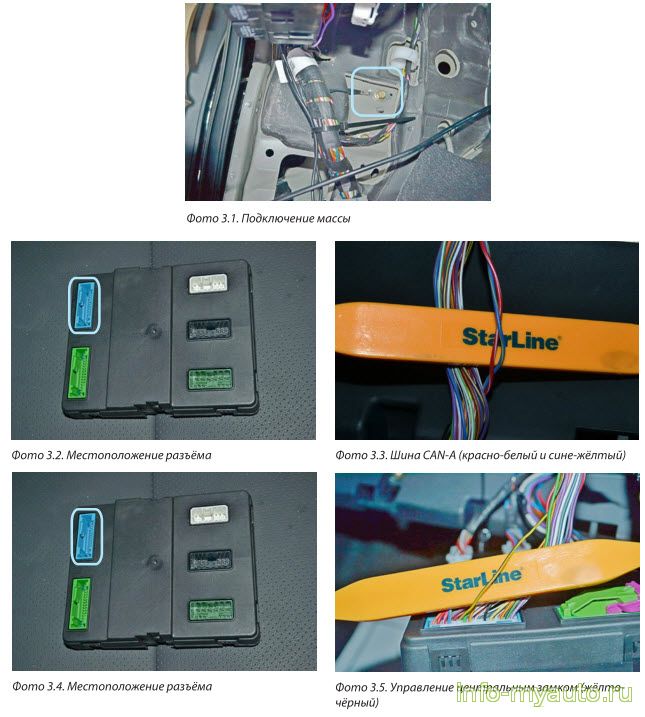 Удалите
Удалите
код и посмотрите, не возвращается ли он. Если ошибка появилась снова, то
следующий шаг — визуальный осмотр проводки. Опытный специалист может визуально
выявить, обрыв проводов или отсутствие контакта. Если источник проблемы найден,
то неисправность должна быть устранена, а код ошибки удален. Если ничего не
обнаружено, необходимо проверить бюллетени технического обслуживания (TSB). TSB
— это рекомендуемые производителем транспортного средства процедуры диагностики
и ремонта. Поиск соответствующего бюллетеня может значительно сократить время
диагностики.
Выявление неисправного блока управления
Первым шагом в
этом направлении будет проверка наличия любых других сохраненных кодов ошибок,
характерных для конкретного модуля. Например, в памяти может храниться код
ошибки U0100, указывающий на проблему связи с блоком управления трансмиссией
(PCM).
Затем выполняется
опрос блоков с помощью диагностического сканера. Сканер подключается к
автомобилю через встроенный диагностический порт. После подключения к
После подключения к
автомобилю сканер становится еще одним модулем в сети и обменивается данными по
сети. Сканер выполняет опрос всех подключенных блоков управления, опрашивая их
статус, чтобы узнать, какие из них работают правильно.
Любой блок,
который не отвечает, скорее всего, неисправен или имеет проблемы с коммутацией.
Отсутствие связи не обязательно означает, что блок управления неисправен. На
нем может отсутствовать питание или «земля». Или, возможно, потребуется
перепрограммировать его.
Затем необходимо
поочередно отключить блоки от CAN шины. Если отсоединение определенного блока восстанавливает связь в CAN
шине, то проблема связана именно с этим блоком или его проводкой.
Перед заменой
неработающего блока необходимо проверить его цепь. Как и любое электронное устройство,
блок управления должен иметь надежный контакт питания и заземления. Также
необходимо проверить программное обеспечение модуля. Во многих случаях модуль
может быть перепрограммирован вместо замены.
Проверка CAN шины
Проверка CAN шины начинается с тестирование сети
через диагностический разъем ODB II. На разъеме находится
16 контактов. Из них: контакт 6 — CAN High, а контакт 14 — CAN Low. Для
первичной проверки шины цифровой мультиметр (DMM) может быть подключен к одному
из этих контактов.
Проверку обоих терминирующих
резисторов шины CAN можно выполнить, подключив мультиметр (DMM) между
контактами 6 и 14. Показания мультиметра в 60 Ом указывают на то, что резисторы
целы.
Примечание к ошибке U0001
В некоторых
случаях ошибка U0001 может сопровождаться 2-х символьным подкодом. Этот код отображает
дополнительную информацию, которая облегчает диагностику. Например, подкод
может указывать, является ли ошибка обрывом или коротким замыканием относительно
земли.
Что такое Кан шина на Приора?
CAN-шина обеспечивает подключение любых устройств, которые могут одновременно принимать и передавать цифровую информацию (дуплексная система). … Данная реализация шина позволила снизить влияние внешних электромагнитных полей, возникающих при работе двигателя и других систем автомобиля.
… Данная реализация шина позволила снизить влияние внешних электромагнитных полей, возникающих при работе двигателя и других систем автомобиля.
Как узнать есть ли CAN шина в автомобиле Приора?
Диагностика неисправностей CAN—шины производится с помощью специализированной диагностической аппаратуры (анализаторы CAN—шины) осциллографа (в том числе, со встроенным анализатором шины CHN) и цифрового мультиметра. Как правило работы по проверке работы CAN—шины начинают с измерения сопротивления между проводами шины.
Как определить есть кан шина или нет?
Выключить зажигание, снять клемму аккумуляторной батареи. Измерить сопротивление между проводниками. Если оно будет стремиться к нулю, значит, в шине присутствует короткое замыкание, если к бесконечности – обрыв.
Что такое CAN шина автомобиля?
CAN-шина — это интерфейс, или система цифровой связи управления электрическими устройствами транспортного средства. Главной целью использования сети контроллеров является сбор, анализ и контроль данных, полученных со всех устройств, установленных на автомобиле.
Главной целью использования сети контроллеров является сбор, анализ и контроль данных, полученных со всех устройств, установленных на автомобиле.
Для чего нужен CAN?
Controller Area Network (CAN) — стандарт промышленной сети, ориентированный на объединение различных датчиков и устройств в единую сеть. … Благодаря шине CAN в современных автомобилях может быть реализовано множество функций: доводчик стекол, электрорегулировка сидений, электронное управление багажником и многое другое.
Как работает CAN трансивер?
Трансивер переводится в этот режим CAN-контроллером через подачу управляющих сигналов на ножки микросхемы. Если это состояние сохраняется определенное время и не происходит пробуждающих событий, то микросхема переходит в режим «Sleep mode».
Официальный сайт LADA
08. 09.2021
09.2021
LADA поддержит частную гоночную команду на ралли DAKAR 2022
Марка LADA приняла решение поддержать частную команду из Швейцарии, которая планирует выступить на ралли Dakar-2022 на классическом внедорожнике LADA Niva 1984 года выпуска. Бренд выступит в качестве официального партнера команды.Классический внедорожник ВАЗ-2121, подготовленный командой самостоятельно, выйдет на старт в новой категории Dakar Classic. Она была создана специально для автомобилей, участвовавших в соревновании до 2000 года. Участвовать в ралли на отечественном автомобиле будут настоящие фанаты модели из Швейцарии: Марио Якобер (Mario Jacober) и Сладан Мильич (Sladjan Miljic).Совместно с командой были разработаны новое название и айдентика в духе 80-х годов ХХ века, когда LADA Niva активно участвовала в различных спортивных состязаниях. Новое название команды — NIVA RED LEGEND Team*.«Мы очень рады, что марка LADA поверила в нас и решила поддержать! Это несомненно придаст нам уверенности и поможет сделать так, чтобы как можно больше людей смогли узнать о нашем проекте. Мы начали подготовку еще зимой, и вот спустя 9 месяцев мы готовы отправиться в путь. Первой нашей остановкой станет город Тольятти, где мы планируем посетить музей АВТОВАЗа и своими глазами увидеть «боевые» «Нивы» прошлого века, вдохновившие нас на участие в ралли Дакар», — отметил Марио Якобер, пилот команды NIVA RED LEGEND Team*.«Мы случайно узнали об этом проекте, так как он вызвал некоторый ажиотаж в российских СМИ. Но наш интерес основан не просто факте участия автомобиля, а потому что за этим стоит очень приятная человеческая история. Мы будем следить за их приключениями и поможем делиться ими со всеми поклонниками Niva в различных средствах массовой информации, включая социальные сети. Мы поддерживаем их, потому что они разделяют наши ценности: соревновательный дух, тягу к приключениям и дружбу», — сказал Фабьен Гульми, директор по бренду и маркетингу LADA.Следить за подготовкой и соревнованиями можно будет в аккаунте команды @nivaredlegendteam в Инстаграм и на канале YouTube, а также на официальных страницах LADA в социальных сетях.*предыдущее название команды — Racing LADA
История технологии CAN
Самые первые документы, опубликованные Bosch, описывающие протокол CAN (спецификация CAN 1.0), эталонная модель CAN C и документ SAE
В феврале 1986 года компания Robert Bosch GmbH представила систему последовательной шины Controller Area Network (CAN) в Обществе автомобильной промышленности. Конгресс инженеров (SAE). Это был час рождения одного из самых успешных сетевых протоколов. Сегодня почти каждый новый легковой автомобиль, производимый в Европе, оборудован как минимум одной сетью CAN.Используемый также в других типах транспортных средств, от поездов до кораблей, а также в промышленных системах управления, CAN является одним из наиболее распространенных протоколов шины — возможно, даже ведущей системой последовательной шины во всем мире.
От идеи до первой микросхемы
В начале 1980-х инженеры Bosch оценивали существующие системы последовательных шин на предмет их возможного использования в легковых автомобилях. Поскольку ни один из доступных сетевых протоколов не соответствовал требованиям автомобильных инженеров, Уве Кинке начал разработку новой системы последовательной шины в 1983 году.
Новый протокол шины в основном должен был добавить новые функции — сокращение количества жгутов проводов было лишь побочным продуктом, но не движущей силой развития CAN. Инженеры Mercedes-Benz были вовлечены на раннем этапе разработки спецификации новой системы последовательной шины, как и Intel как потенциальный основной поставщик полупроводников. Профессор доктор Вольфхард Лоуренц из Университета прикладных наук в Брауншвейге-Вольфенбюттеле (сегодня: Университет прикладных наук Остфалия), Германия, который был нанят в качестве консультанта, дал новому сетевому протоколу название «Controller Area Network».Профессор доктор Хорст Веттштейн из Университета Карлсруэ также оказал академическую помощь.
В феврале 1986 года родилась CAN: на конгрессе SAE в Детройте новая шинная система была представлена как «Автомобильная последовательная сеть контроллеров». Уве Кинке, Зигфрид Дайс и Мартин Литчел представили многоточечный сетевой протокол. Он был основан на механизме неразрушающего арбитража, который предоставляет шину доступ к кадру с наивысшим приоритетом без каких-либо задержек.Не было центральной инстанции, регулирующей доступ к сети. Кроме того, отцы CAN — упомянутые выше лица плюс сотрудники Bosch Вольфганг Борст, Вольфганг Ботценхард, Отто Карл, Гельмут Шеллинг и Ян Унру — внедрили несколько механизмов обнаружения ошибок. Обработка ошибок также включала автоматическое отключение неисправных узлов шины, чтобы поддерживать связь между оставшимися узлами. Переданные кадры идентифицировались не по адресам узлов передатчика кадров или приемников кадров (как почти во всех других шинных системах), а по их содержимому.Идентификатор, представляющий полезную нагрузку кадра, также имел функцию определения приоритета кадра в сетевом сегменте.
За этим последовало множество презентаций и публикаций, описывающих этот инновационный протокол связи, пока в середине 1987 года — на два месяца раньше запланированного срока — Intel не выпустила первый чип контроллера CAN, 82526. Это была самая первая аппаратная реализация протокола CAN. Всего за четыре года идея воплотилась в жизнь. Вскоре после этого Philips Semiconductors представила 82C200.Эти два самых ранних предка контроллеров CAN сильно различались в отношении фильтрации приема и обработки кадров. С одной стороны, концепция FullCAN, одобренная Intel, требовала меньшей нагрузки на ЦП (центральный процессор) от подключенного микроконтроллера, чем реализация BasicCAN, выбранная Philips. С другой стороны, устройство FullCAN было ограничено по количеству принимаемых кадров. Контроллеру BasicCAN также требовалось меньше кремния. В современных контроллерах CAN реализовано сочетание обеих концепций фильтрации приема и обработки кадров.Это сделало вводящие в заблуждение термины BasicCAN и FullCAN устаревшими.
Стандартизация и соответствие
Спецификация Bosch CAN (версия 2.0) была представлена для международной стандартизации в начале 1990-х годов. После нескольких политических споров, особенно связанных с «сетью транспортных средств» (VAN), разработанной некоторыми крупными французскими производителями автомобилей, в ноябре 1993 года был опубликован стандарт ISO 11898. В дополнение к протоколу CAN он также стандартизировал физический уровень для битов. скорость до 1 Мбит / с.Параллельно с этим в ISO 11519-2 был стандартизирован маломощный, отказоустойчивый способ передачи данных через CAN. Это никогда не было реализовано из-за недостатков в стандарте. В 1995 году стандарт ISO 11898 был расширен добавлением, описывающим расширенный формат кадра с использованием 29-битного идентификатора CAN.
К сожалению, все опубликованные спецификации и стандартизация CAN содержали ошибки или были неполными. Чтобы избежать несовместимых реализаций CAN, компания Bosch позаботилась о том, чтобы все микросхемы CAN соответствовали эталонной модели Bosch CAN.Кроме того, Университет прикладных наук в Брауншвейге / Вольфенбюттеле, Германия, уже несколько лет проводит испытания на соответствие CAN под руководством профессора Лоренца. Используемые тестовые шаблоны основаны на серии стандартов плана тестирования на соответствие ISO 16845. Сегодня несколько испытательных центров предлагают услуги тестирования на соответствие CAN.
Пересмотренные спецификации CAN стандартизированы. ISO 11898-1 описывает «уровень канала передачи данных CAN», ISO 11898-2 стандартизирует «не отказоустойчивый» физический уровень CAN », а ISO 11898-3 определяет« отказоустойчивый физический уровень CAN ».В сериях ISO 11992 (интерфейс грузовиков и прицепов) и ISO 11783 (машины для сельского и лесного хозяйства) указаны профили приложений на основе сетевого подхода SAE J1939. Они несовместимы, потому что спецификации физического уровня разные.
Время пионеров CAN
Хотя CAN изначально разрабатывался для использования в легковых автомобилях, первые приложения пришли из разных сегментов рынка. CAN был очень популярен в первые дни своего существования, особенно в Северной Европе.В Финляндии производитель лифтов Kone использовал шину CAN. Шведское инженерное бюро Kvaser предложило CAN в качестве протокола связи внутри машин некоторым производителям текстильных машин (Lindauer Dornier и Sulzer) и их поставщикам. В связи с этим, эти компании под руководством Ларса-Берно Фредрикссона основали «CAN Textile User’s Group». К 1989 году они разработали принципы коммуникации, которые помогли сформировать среду разработки CAN Kingdom в начале 1990-х годов.Хотя CAN Kingdom не является прикладным уровнем по отношению к эталонной модели OSI, его можно рассматривать как прародителя протоколов более высокого уровня на основе CAN.
В Нидерландах Philips Medical Systems присоединилась к промышленным пользователям CAN, решив использовать CAN для внутренней сети своих рентгеновских аппаратов. «Спецификация сообщений Philips» (PMS), в основном разработанная Томом Сутерсом, представляет собой первый прикладной уровень для сетей CAN. Профессор доктор Конрад Эчбергер из Университета прикладных наук в Вайнгартене, Германия, придерживался почти идентичных идей.В Центре трансфера для автоматизации процессов Штайнбайса (STZP), которым он руководил, он разработал аналогичный протокол.
Несмотря на то, что начали появляться первые стандартизированные протоколы более высокого уровня, большинство пионеров CAN использовали монолитный подход. Коммуникационные функции, управление сетью и программный код составляли одно целое. Несмотря на то, что некоторые пользователи предпочли бы более модульный подход, у них все же был бы недостаток проприетарного решения.Необходимые усилия для улучшения и поддержки протокола более высокого уровня CAN были недооценены — что отчасти верно и сегодня.
В начале 1990-х годов настало время основать группу пользователей, чтобы продвигать протокол CAN и способствовать его использованию во многих приложениях. В январе 1992 года Хольгер Зельтвангер, в то время редактор журнала VMEbus (издатель: Franzis), объединил пользователей и производителей, чтобы создать нейтральную платформу для технического совершенствования CAN, а также маркетинга системы последовательной шины.Два месяца спустя была официально основана международная группа пользователей и производителей CAN in Automation (CiA). В те дни уже был опубликован информационный бюллетень CAN.
Первая техническая публикация, выпущенная всего через несколько недель, была посвящена физическому уровню: CiA рекомендовала использовать только CAN-трансиверы, соответствующие стандарту ISO 11898. Сегодня специфические для производителя трансиверы EIA-485, которые довольно часто использовались в CAN-сетях. в то время и не всегда были совместимы, должны были полностью исчезнуть.
Одной из первых задач CiA была спецификация прикладного уровня CAN. Используя существующие материалы от Philips Medical Systems и STZP, а также с помощью других членов CiA, был разработан CAN Application Layer (CAL), также называемый «Зеленой книгой». При разработке спецификаций с использованием CAN одной из основных задач CiA была организация обмена информацией между экспертами по CAN и теми, кто хотел больше узнать о CAN. Поэтому с 1994 года проводится международная CAN Conference (iCC).
Другой академический подход применялся в LAV: Немецкая ассоциация сельскохозяйственных транспортных средств. С конца 1980-х годов была разработана система шин на основе CAN для сельскохозяйственных машин (LBS). Но прежде чем работа могла быть успешно завершена, международный комитет принял решение в пользу американского решения J1939 (ISO 11783). Этот профиль приложения, который также основан на CAN, был определен комитетами SAE Truck and Bus Association. J1939 — это немодульный подход, который очень прост в использовании, но при этом довольно негибкий.
Для грузовиков также была разработана стандартизация CAN. Сеть между грузовиком и прицепом стандартизирована как ISO 11992. Этот протокол основан на J1939 и должен использоваться в Европе с 2006 года. Тенденция для автомобильных транспортных средств идет в сторону OSEK-COM и OSEK-NM, протокола связи и управления сетью. . Оба были представлены на международную стандартизацию. Однако до сих пор автомобилестроители использовали проприетарные программные решения.
От теории к практике
Конечно, производители полупроводников, внедрившие ядра CAN в свои микроконтроллеры, в основном ориентированы на автомобильную промышленность.С середины 1990-х годов Infineon Technologies (ранее Siemens Semiconductors) и Motorola (переданная на аутсорсинг как Freescale, а затем приобретенная NXP) поставили большие партии контроллеров CAN европейским производителям легковых автомобилей и их поставщикам. В качестве следующей волны дальневосточные поставщики полупроводников также предлагают контроллеры CAN с конца 1990-х годов. NEC выпустила свой легендарный CAN-чип 72005 в 1994 году, но это было слишком рано — компонент не имел коммерческого успеха.
С 1991 года Mercedes-Benz использует CAN в своих легковых автомобилях высшего класса.На первом этапе электронные блоки управления, отвечающие за управление двигателем, были подключены через CAN. В 1995 году BMW использовала сеть CAN с топологией «дерево / звезда» с пятью ЭБУ (электронными блоками управления) в своих автомобилях серии 7. На втором этапе последовали блоки управления, необходимые для электроники кузова. Были реализованы две физически отдельные сети CAN, часто соединенные через шлюзы. Другие производители автомобилей последовали примеру своих коллег из Штутгарта и обычно внедряли две сети CAN в своих легковых автомобилях.В настоящее время все они реализуют несколько сетей CAN в своих автомобилях.
В начале 1990-х инженеры американской машиностроительной компании Cincinnati Milacron вместе с Allen-Bradley и Honeywell Microswitch создали совместное предприятие по проекту управления и связи на основе CAN. Однако через некоторое время важные участники проекта сменили работу, и совместное предприятие распалось. Но Аллен-Брэдли и Ханиуэлл продолжили работу по отдельности. Это привело к появлению двух протоколов более высокого уровня, Devicenet и Smart Distributed System (SDS), которые очень похожи, по крайней мере, на нижних уровнях связи.В начале 1994 года Аллен-Брэдли передал спецификацию Devicenet в «Open Devicenet Vendor Association» (ODVA), что повысило популярность Devicenet. Honeywell не смогла пойти подобным образом с SDS, что делает SDS более похожим на внутреннее решение Honeywell Microswitch. Devicenet был разработан специально для автоматизации производства и поэтому является прямым противником таких протоколов, как Profibus-DP и Interbus. Предоставляя готовую функциональность plug-and-play, Devicenet стала ведущей шинной системой в этом конкретном сегменте рынка в США.
В Европе несколько компаний пытались использовать CAL. Хотя подход CAL был академически правильным и его можно было использовать в промышленных приложениях, каждому пользователю нужно было разработать новый профиль, потому что CAL была настоящим прикладным уровнем. CAL можно рассматривать как необходимый академический шаг к независимому от приложений решению CAN, но он так и не получил широкого распространения в этой области.
С 1993 года в рамках проекта Esprit Aspic европейский консорциум, возглавляемый Bosch, разрабатывал прототип того, что впоследствии станет CANopen.Это был профиль на основе клиентской лицензии для внутренней сети производственных ячеек. С академической стороны, профессор д-р Герхард Грюлер из Университета прикладных наук в Ройтлингене (Германия) и д-р Мохаммед Фарси из Университета Ньюкасла (Великобритания) приняли участие в одном из самых успешных мероприятий Esprit за всю историю. После завершения проекта спецификация CANopen была передана в CiA для дальнейшей разработки и сопровождения. В 1995 году был выпущен полностью переработанный коммуникационный профиль CANopen, который всего за пять лет стал самой важной стандартизированной встроенной сетью в Европе.
Первые сети CANopen использовались для внутренней машинной связи, особенно для приводов. CANopen предлагает очень высокую гибкость и настраиваемость. Протокол верхнего уровня, который использовался в нескольких очень разных областях применения (промышленная автоматизация, морская электроника, военные автомобили и т. Д.), Тем временем был стандартизирован на международном уровне как EN 50325-4 (2003). CANopen используется особенно в Европе. Термопластавтоматы в Италии, пилы и станки по дереву в Германии, сигаретные машины в Великобритании, краны во Франции, манипуляторы в Австрии и станки для производства часов в Швейцарии — вот лишь несколько примеров промышленной автоматизации и машиностроения.В Соединенных Штатах CANopen рекомендуется для вилочных погрузчиков и используется в машинах для сортировки писем.
CANopen не только определяет уровень приложений и профиль связи, но также и структуру для программируемых систем, а также различные профили устройств, интерфейсов и приложений. Это важная причина, по которой целые сегменты отрасли (например, печатные машины, морские приложения, медицинские системы) решили использовать CANopen в конце 1990-х годов.
С Devicenet и CANopen, два стандартизированных (IEC 62026-3 соотв.EN 50325-4 / 5) доступны уровни приложений, предназначенные для различных рынков промышленной автоматизации. Devicenet оптимизирован для автоматизации производства, а CANopen особенно хорошо подходит для встроенных сетей во всех видах систем управления машинами. Это сделало проприетарные уровни приложений устаревшими; необходимость определения прикладных уровней для конкретных приложений стала историей (за исключением, возможно, некоторых специализированных встроенных систем большого объема).
Связь с синхронизацией по времени
В начале 2000 года рабочая группа ISO с участием нескольких компаний определила протокол для синхронизированной по времени передачи CAN-кадров.Д-р Бернд Мюллер, Томас Фюрер и другие сотрудники Bosch вместе с экспертами из полупроводниковой промышленности и академических исследований определили протокол «синхронизированная по времени связь по CAN» (TTCAN).
Это расширение CAN позволило осуществлять эквидистантную передачу кадров и реализацию управления с обратной связью через CAN, а также использовать CAN в приложениях x-by-wire. Поскольку протокол CAN не был изменен, можно передавать кадры, запускаемые по времени, а также по событиям через одну и ту же систему физической шины.Однако автомобильная промышленность не приняла TTCAN. Кроме того, промышленные пользователи редко использовали расширение протокола с синхронизацией по времени. Вместо этого они использовали функции синхронной передачи, указанные в CANopen, так сказать, метод мягкого запуска по времени.
Утверждение властями
В конце 90-х было изобретено несколько патентованных протоколов безопасности на основе CAN. У Survived есть автобус Safetybus p фирмы Pilz, Германия. В 1999 году CiA приступила к разработке протокола CANopen-Safety, который был одобрен немецким TÜV.После тяжелых политических переговоров в органах по стандартизации это расширение CANopen (CiA 304) было стандартизировано на международном уровне в EN 50325-5 (2009).
Devicenet использует расширение протокола безопасности CIP. Germanischer Lloyd, одно из ведущих классификационных обществ мира, одобрило структуру CANopen для морских приложений (CiA 307). Среди прочего, эта структура определяет автоматическое переключение с сети CANopen по умолчанию на систему резервных шин. В настоящее время эти функции обобщены и определены в серии CiA 302 дополнительных функций прикладного уровня CANopen.
Разработка CAN FD
В начале 2011 года General Motors и Bosch начали разработку некоторых усовершенствований протокола CAN, направленных на повышение пропускной способности. В частности, автомобильная промышленность пострадала при загрузке постоянно увеличивающихся пакетов программного обеспечения в электронные блоки управления (ЭБУ). Эту трудоемкую задачу пришлось сократить за счет более производительной системы связи. Идея увеличить скорость передачи CAN за счет введения второй скорости передачи данных не была новой.С начала 2000 года несколько ученых опубликовали подходы. Но ни один из них не был достаточно зрелым, чтобы убедить автопроизводителей. В сотрудничестве с другими экспертами по CAN компания Bosch предварительно разработала спецификацию CAN FD, официально представленную в 2012 году на 13 -й международной конференции CAN в замке Хамбах, Германия.
В процессе стандартизации в рамках ISO было обнаружено несколько академических недостатков в предлагаемых механизмах обнаружения ошибок. Это потребовало пересмотра протокола CAN FD и введения дополнительных мер безопасности (например,грамм. битовый счетчик). По этой причине существует протокол CAN FD, отличный от ISO, который несовместим с протоколом ISO CAN FD, стандартизированным в ISO 11898-1.
Доктор Марк Шрайнер из Daimler дал множество подсказок и подсказок для проектирования сетей CAN FD. Многие из его идей включены в серию CiA 601 узла CAN FD, а также рекомендации и спецификации по проектированию системы.
Светлое будущее CAN
Срок службы технологии CAN был продлен с введением протокола CAN FD.Автомобильная промышленность уже начала применять протокол CAN FD для следующего поколения автомобильных сетей. Можно ожидать, что все будущие приложения будут использовать протокол CAN FD. Неважно, требуется ли им более высокая пропускная способность или нет. Вы по-прежнему можете использовать CAN FD с одной настройкой битовой синхронизации. В любом случае длину полезной нагрузки можно настроить от 0 до 64 байтов.
Для тех, кому требуется большая полоса пропускания и гибридные топологии, CiA разработала так называемую спецификацию приемопередатчика SIC (схема улучшения сигнала) (CiA 601-4).Первоначальная идея пришла от Denso, японского поставщика Tier-1.
CiA также разработал протокол CANopen FD, который основан на нижних уровнях CAN FD. В частности, для промышленных приложений управления движением очень приветствуются более высокие скорости передачи и большие объемы полезной нагрузки (до 64 байт). CiA также участвует в разработке прикладного уровня на основе CAN FD для коммерческих автомобилей с использованием существующих групп параметров, как указано в серии SAE J1939.
CAN третьего поколения
В конце 2018 года CiA приступила к разработке CAN XL, третьего поколения протоколов канального уровня на основе CAN.Это было инициировано по запросу Volkswagen. Карстен Шанце и Александр Мюллер предложили многие из первых идей. Максимальная полезная нагрузка (поле данных) CAN XL составляет 2048 байт. Еще одна новая функция — разделение функции приоритета (11-битное поле приоритета) и функции адреса / содержимого (32-битное поле принятия). Доктор Артур Муттер (Bosch) и Ральф Хильдебранд (Фраунгофер) вместе с другими экспертами внесли множество новых идей.
Тем временем несколько технических групп CiA разрабатывают серию документов CiA, связанных с CAN XL.Это включает также новый подход к подключению физических носителей с использованием ШИМ-кодирования вместо традиционного NRZ-кодирования. Эксперты NXP, особенно Матиас Мут, представили исходное предложение по кодированию PWM.
Помимо спецификаций нижнего уровня CAN XL, включая планы испытаний на соответствие, существуют рекомендации по проектированию устройств и сети CAN XL, спецификации протокола CAN XL более высокого уровня, а также спецификации управления уровнями. Кроме того, члены CiA определяют протокол безопасности канального уровня CAN XL.
Что такое шина CAN (сеть контроллеров)
Автор Грант Малой Смит, эксперт по сбору данных
В этой статье мы обсудим шину CAN (сеть контроллеров) и другие интерфейсы автомобильной шины, чтобы вы могли:
- См. , что такое CAN-шина на самом деле
- Узнайте об истории развития и будущем систем CAN-Bus
- Понять , как системы сбора данных Dewesoft взаимодействуют с шиной CAN
Что такое протокол шины CAN?
Контроллерная сеть — CAN-шина — это протокол на основе сообщений, разработанный, чтобы позволить электронным блокам управления (ЭБУ), используемым в современных автомобилях, а также другим устройствам, обмениваться данными друг с другом надежным и приоритетным образом. .Сообщения или «кадры» принимаются всеми устройствами в сети, для чего не требуется хост-компьютер. CAN поддерживается богатым набором международных стандартов ISO 11898.
Схема сети CAN-шины
Что такое CAN FD?
CAN FD — это версия CAN-шины с гибкими данными (скоростью). Стандартная длина каждого сообщения была увеличена на 800% до 64 байтов, а максимальная скорость передачи данных аналогичным образом увеличена с 1 Мбит / с до 8 Мбит / с.«Гибкая» часть относится к тому факту, что ЭБУ могут динамически изменять свою скорость передачи и выбирать больший или меньший размер сообщений в зависимости от требований реального времени.
Несмотря на все эти достижения, CAN FD по-прежнему полностью обратно совместим со стандартом CAN 2.0. Сегодня CAN FD встречается в очень мощных транспортных средствах, но ожидается, что со временем он переместится на все или большинство транспортных средств.
Это видео предоставляет отличную справочную информацию о шинах данных транспортных средств, в том числе CAN:
.
Преимущества CAN-шины
Стандарт CAN-шины широко распространен и используется практически во всех транспортных средствах и многих машинах.В основном это связано с следующими ключевыми преимуществами:
- Просто и недорого : ЭБУ обмениваются данными через единую систему CAN, а не через прямые сложные аналоговые сигнальные линии, что снижает количество ошибок, вес, количество проводов и затраты. Наборы микросхем CAN легко доступны и доступны по цене.
- Полностью централизованный : шина CAN обеспечивает единую точку входа для связи со всеми сетевыми ЭБУ, обеспечивая централизованную диагностику, регистрацию данных и настройку.
- Чрезвычайная надежность : система устойчива к электрическим помехам и электромагнитным помехам — идеально подходит для критически важных с точки зрения безопасности приложений (например,грамм. транспортных средств)
- Эффективный : кадры CAN имеют приоритет по номерам идентификаторов. Данные с наивысшим приоритетом получают немедленный доступ к шине, не вызывая прерывания других кадров.
- Снижение массы транспортного средства : за счет исключения километров сильно изолированных электрических проводов и их веса от транспортного средства.
- Easy Deployment : проверенный стандарт с обширной экосистемой поддержки.
- Устойчивость к электромагнитным помехам : это делает CAN идеальным решением для критически важных приложений в транспортных средствах.
CAN имеет отличные возможности управления и обнаружения неисправностей. Обнаружить ошибку легко, и, таким образом, переданные данные попадают туда, куда им нужно.
Это идеальный протокол, когда требуется распределенное управление сложной системой. Это уменьшает тяжелую проводку и, следовательно, снижает стоимость и вес. Стоимость микросхем невысока, а реализация CAN относительно проста благодаря чистому дизайну протокола.
Еще одно преимущество использования CAN состоит в том, что первые два уровня: физический уровень и уровень канала передачи данных реализованы в недорогих микрочипах, доступных в нескольких конфигурациях.
Популярные приложения CAN-шины
Сегодня приложения для CAN преобладают в автомобильной и автомобильной промышленности, но этим не ограничиваются. CAN можно найти практически во всех отраслях. Вы можете найти используемый протокол CAN в:
- Все виды транспортных средств: мотоциклы, автомобили, грузовики …
- Телематика для тяжелых условий эксплуатации
- Самолеты
- Лифты
- Производственные предприятия всех видов
- Корабли
- Медицинское оборудование
- Системы профилактического обслуживания
- Стиральные, сушильные машины и прочая бытовая техника.
Краткая история CAN-шины
Когда вы щелкаете выключателем в доме, чтобы включить свет, электричество проходит через выключатель к свету. В результате переключатели и проводка должны быть тяжелыми и достаточно изолированными, чтобы выдерживать максимальный ожидаемый ток. Стены вашего дома залиты этой тяжелой изолированной проводкой.
Раньше легковые и грузовые автомобили были подключены точно так же: с тех пор, как Генри Форду пришла в голову идея добавить в свои автомобили фары и электрический гудок в 1915 году, электричество текло от батареи через переключатели к фарам и другим устройствам.К 1960-м годам через каждую машину были протянуты тысячи тяжелых проводов. Каждый лишний вес снижает топливную экономичность автомобиля.
Автомобиль с предварительной шиной CAN, внутри которого проложены толстые провода на мили / километры.
Авторские права Райан Макгуайр с сайта Pixabay.
После нефтяного эмбарго 1970-х годов на производителей автомобилей оказывалось все большее давление, чтобы они повышали свою топливную эффективность. Поэтому они начали искать способы уменьшить вес машин, которые они производили.
Типовая электропроводка в легковом автомобиле
Изображение предоставлено Transparency Market Research
К началу 1980-х годов в автомобилях было все больше и больше ЭБУ (электронных блоков управления) внутри, и такие компании, как компания Robert Bosch из Германии, искали тип системы связи по шине, который можно было бы использовать в качестве системы связи между несколькими ЭБУ и автомобилем. системы. Они искали рынок, но не смогли найти именно то, что им нужно, поэтому они начали разработку «Controller Area Network» в партнерстве с производителем автомобилей Mercedes-Benz и производителем полупроводников Intel®, а также несколькими университетами в Германии.
В 1986 году компания Bosch представила стандарт CAN на Конгрессе SAE в Детройте. Год спустя корпорация Intel начала поставки первых микросхем CAN-контроллеров, и автомобильный мир изменился навсегда. Оглядываясь назад, можно сказать, что снижение веса в результате разработки CAN было почти удачным побочным продуктом, но тем не менее вполне реальным.
В современных легковых и грузовых автомобилях тяжелый кабель заменяется легким 2-проводным CAN
Как работает обмен сообщениями CAN?
Устройства на шине CAN называются «узлами».Каждый узел состоит из ЦП, контроллера CAN и приемопередатчика, который регулирует уровни сигналов как данных, отправляемых и принимаемых узлом. Все узлы могут отправлять и получать данные, но не одновременно.
Узлы не могут отправлять данные друг другу напрямую. Вместо этого они отправляют свои данные в сеть, где они доступны любому узлу, которому они были адресованы. Протокол CAN работает без потерь и использует метод побитового арбитража для разрешения конфликтов на шине.
Все узлы синхронизированы, поэтому все они одновременно производят выборку данных в сети.Однако данные не передаются с данными часов (времени), поэтому CAN на самом деле не является синхронной шиной, такой как, например, EtherCAT.
С CAN все данные отправляются в кадрах, и есть четыре типа:
- Кадры данных передают данные одному или нескольким узлам-приемникам
- Удаленные кадры запрашивают данные с других узлов
- Фреймы ошибок сообщают об ошибках
- Кадры перегрузки сообщают об условиях перегрузки
Возможны два варианта длины сообщения: стандартный и расширенный.Настоящая разница заключается в дополнительном 18-битном идентификаторе в поле арбитража.
Стандартный и расширенный фреймы архитектуры сообщения данных CAN
Структура сообщения данных CAN (кадр CAN)
| Поле | Биты | Описание |
|---|---|---|
| СОФ | 1 | Единственное доминирующее начало кадра. Этот бит отмечает начало сообщения. Он синхронизирует узлы после периода простоя. |
| Идентификатор | 11 | 11-битное поле данных идентификатора CAN устанавливает приоритет сообщения. Более низкие значения означают более высокие приоритеты. |
| РТР | 1 | Запрос удаленной передачи. Этот бит является доминирующим, когда информация запрашивается другим узлом. Все узлы получат запрос, но идентификатор определяет желаемый узел. |
| IDE | 1 | Бит расширения идентификатора указывает, что передается стандартный идентификатор CAN (не расширенный). |
| R0 | 1 | Зарезервировано для использования в будущем. |
| DLC | 4 | Код длины данных содержит количество байтов в передаче. |
| Данные | 0–64 | Фактические передаваемые данные. |
| CRC | 16 | 16-битный (15 бит плюс разделитель) циклический избыточный контроль (CRC) содержит контрольную сумму (количество переданных битов) данных предыдущего приложения для обнаружения ошибок передачи. |
| ACK | 2 | Когда узел успешно получает сообщение, он подтверждает его, перезаписывая этот бит доминирующим битом. С другой стороны, если узел обнаруживает ошибку в сообщении, он позволяет этому биту оставаться рецессивным и игнорирует сообщение. Слот ACK и разделитель ACK имеют длину один бит. |
| EOF | 7 | Конец кадра — это 7-битное поле, которое обозначает конец каждого кадра CAN (сообщения). |
| IFS | 3+ | Межкадровое пространство (IFS) — это время, необходимое контроллеру для перемещения кадра (сообщения) в позицию в буферной области. Обратите внимание, что IFS содержит минимум три последовательных рецессивных (1) бита. После прохождения трех рецессивных битов, когда обнаруживается доминирующий бит, он становится битом SOF следующего кадра. |
Если присмотреться к битовым полям сообщений передачи данных CAN
Поле арбитража содержит идентификационный номер сообщения и бит запроса удаленной передачи.Более важные сообщения имеют более низкие идентификационные номера.
Если несколько узлов передают одновременно, они начинают одновременный арбитраж. Узел с наименьшим идентификатором сообщения получает приоритет. Доминантные биты перезаписывают рецессивные биты на шине CAN.
Идентификатор сообщения может иметь длину , 11 бит, (стандартный CAN, 2048 различных идентификаторов сообщений) или 29 бит (расширенный CAN, 537 миллионов различных идентификаторов сообщений). Бит запроса удаленной передачи является доминирующим и указывает, что данные передаются.
В большинстве систем логическая 1 представляет высокий уровень, а логический 0 — низкий. Но на CAN-шине все наоборот. Поэтому трансиверы CAN обычно используют подтяжку на входах драйвера и выходах приемника, так что устройства по умолчанию перешли в рецессивное состояние шины.
Варианты CAN-шины
Стандарт ISO 11898 определяет несколько версий CAN. В автомобильной промышленности преобладают следующие типы CAN:
Низкая скорость CAN
Используется для отказоустойчивых систем, не требующих высокой частоты обновления.Максимальная скорость передачи данных составляет 125 кбит / с, но, таким образом, проводка более экономична, чем высокоскоростной CAN. В автомобильных приложениях низкоскоростной CAN используется для диагностики, управления и индикации приборной панели, стеклоподъемников и т. Д.
Высокая скорость CAN
Используется для связи между критически важными подсистемами, которым требуется высокая частота обновления и высокая точность данных (например, антиблокировочная тормозная система, электронный контроль устойчивости, подушки безопасности, блоки управления двигателем и т. Д.). Скорость передачи данных высокоскоростной CAN колеблется от 1 кбит до 1 Мбит в секунду.
Высокоскоростной CAN быстрее, чем низкий, но требования к пропускной способности новых автомобильных приложений растут с каждым годом, поэтому производители автомобилей теперь устанавливают CAN FD в новые автомобили. CAN FD насмешливо описывают как «CAN на стероидах».
CAN FD (CAN с гибкой скоростью передачи данных)
Последняя версия CAN обеспечивает гибкую скорость передачи данных, большее количество данных в сообщении и гораздо более высокую скорость передачи. Длина данных в каждом стандартном (низкоскоростном и высокоскоростном) сообщении CAN составляет 8 байтов, но с CAN FD он был увеличен на 800% до 64 байтов данных.Кроме того, максимальная скорость передачи данных также резко увеличена с 1 Мбит / с до 8 Мбит / с.
Формат кадра данных CAN FD
CAN FD также имеет обратную совместимость и поддерживает протокол связи CAN 2.0, а также специальные протоколы, такие как SAE J1939, где CAN out используется только для чтения. CAN FD по сути является расширением исходного стандарта CAN, как указано в ISO 11898-1, и полностью совместим с классическими системами CAN.
CAN FD — важный шаг вперед, поскольку он позволяет ЭБУ динамически изменять свою скорость передачи и выбирать больший или меньший размер сообщений в зависимости от требований реального времени.Сейчас он используется в высокопроизводительных транспортных средствах, но по мере роста производительности ECU и снижения затрат на оборудование CAN FD, появление CAN FD практически во всех транспортных средствах — лишь вопрос времени.
Многие продукты Dewesoft имеют встроенные интерфейсы низко- / высокоскоростной шины CAN, включая SIRIUS (и инструменты на базе SIRIUS, включая R1, R2, R3, R4, R8, R8rt), DEWE-43A и MINITAUR. Все эти модели включают одну шину CAN, за исключением DEWE-43A, у которой их две. Дополнительные интерфейсы CAN-шины могут быть добавлены к любой системе Dewesoft с использованием имеющихся интерфейсов с 1, 2, 4 и даже 8 портами.
Интерфейсы шины CAN доступны почти в каждой системе Dewesoft DAQ
Если требуется CAN FD, KRYPTONi-1xCAN-FD — это однопортовое устройство CAN FD, которое использует EtherCAT в качестве интерфейса данных. Он поддерживает высокоскоростные интерфейсы CAN со скоростью передачи данных до 8 Мбит / с. Кроме того, CAN FD поддерживает протокол связи CAN2.0, а также специальные протоколы, такие как J1939, где CAN out используется только для чтения. KRYPTONi-1xCAN-FD использует гальванически изолированные линии связи и изолированное питание датчиков +5 В и +12 В.Предел мощности питания датчика 1,4 Вт.
Прочный и водонепроницаемый KRYPTONi-1xCAN-FD с интерфейсом EtherCAT
Этот очень маленький модуль CAN FD может быть добавлен к любому прибору Dewesoft DAQ, имеющему порт EtherCAT, который включает всю линейку SIRIUS и, конечно же, саму линию KRYPTON.
Дополнительные стандарты и протоколы CAN
Зачем нужны дополнительные стандарты и протоколы «поверх» CAN? Это просто потому, что, хотя CAN — элегантный и надежный протокол, на самом деле это все.Это система обмена сообщениями, но она не включает никаких способов анализа или понимания данных в сообщениях. Вот почему несколько компаний создали дополнительные стандарты и протоколы, которые работают в CAN или поверх нее, обеспечивая дополнительные функции. К наиболее известным из них относятся:
SAE J1939 на CAN
Протокол SAE J1939 изначально был разработан для использования на тяжелых грузовиках и тягачах с прицепами в США. Сегодня он используется производителями дизельных двигателей во всем мире.J1939 — это протокол более высокого уровня, работающий на физическом уровне CAN. Он предоставляет некоторые полезные функции, характерные для тяжелых грузовиков, таких как 18-колесные грузовики.
SAE на схеме CAN
Протокол имеет несколько ограничений, которые были намеренно введены для обеспечения максимально возможной надежности, включая ограничение идентификатора сообщения до 29 бит и ограничение скорости шины до 250 или 500 кбит / с.
Экран настройки шины CAN в программе DewesoftX.Обратите внимание на флажок J1939 в левом верхнем углу.
Программное обеспечение
DewesoftX позволяет инженеру выбрать декодирование J1939 с помощью флажка на экране настройки CAN для любого доступного порта CAN. Конечно, это предполагает, что сообщения на шине CAN отформатированы в соответствии со стандартом J1939. Сообщения данных имеют ту же длину, что и расширенный стандарт CAN.
Поле арбитража содержит дополнительный адрес источника и назначения, а скорость передачи ограничена 250 или 500 кбит / с, в зависимости от используемой стандартной версии J1939.J1939 — это выбор на стандартном экране настройки Dewesoft X CAN — никакого дополнительного оборудования или программного обеспечения не требуется.
OBD II (он же «OBD 2»)
Этот бортовой диагностический порт имеется во всех автомобилях, выпущенных с 1989 года. Обычно расположенный в пределах 2 футов (0,61 метра) от рулевого колеса, это интерфейс, который позволяет автомастерским, а также владельцам транспортных средств диагностировать проблемы с автомобилем, подключая сканирующий инструмент к его 16-контактному разъему. (На фото под рулем в Toyota 4Runner 2016 года).
Разъем OBD II на автомобиле
Приборы сканирования
могут считывать DTC (диагностические коды неисправностей), сообщаемые автомобилем. Интерфейс OBD II необходим для передачи десятков каналов данных в реальном времени, таких как обороты, скорость автомобиля, температура охлаждающей жидкости и т. Д. Интерфейсы CAN Dewesoft могут быть подключены к этому разъему OBD II, как показано ниже, и могут считывать, отображать и записывать любой или все эти каналы синхронно с другими записываемыми данными.
Разъем OBD II (слева), подключенный к разъему интерфейса CAN Dewesoft (справа)
Только часть экрана настройки ODB II в программе DewesoftX
Для декодирования, отображения и записи сообщений ODB II в системах Dewesoft требуется дополнительный программный плагин ODB II.С помощью этой системы вы можете сканировать DTC (диагностические коды неисправностей) и многое другое.
XCP / CCP на CAN и Ethernet
Универсальный протокол измерений и калибровки (XCP) был разработан для подключения ЭБУ к системам калибровки. Слово «универсальный» в его названии указывает на то, что он может работать поверх шины CAN, CAN FD, FlexRay, Ethernet и других. Он является преемником оригинального протокола калибровки CAN (CCP), разработанного в 1990-х годах.
Dewesoft поддерживает протоколы XCP / CCP через плагины XCP / CCP Master и XCP / CCP Slave, которые работают в программном обеспечении DewesoftX DAQ.Можно использовать стандартное оборудование интерфейса Dewesoft CAN (и Ethernet).
Видео презентации Dewesoft XCP
В дополнение к этим подключаемым модулям XCP Slave и Master, системы сбора данных SIRIUS XHS и IOLITE LX от Dewesoft могут изначально передавать данные через XCP в Ethernet без необходимости в каком-либо дополнительном программном обеспечении. Пожалуйста, посмотрите это короткое вводное видео для получения дополнительной информации о системах сбора данных Dewesoft XCP и регистраторах данных XCP:
CANopen
CANopen — это протокол более высокого уровня, который используется для встроенных приложений управления.Поскольку он основан на протоколе обмена сообщениями CAN, системы сбора данных и регистраторы данных, которые могут считывать и записывать данные CAN, также могут получать доступ к данным из CANopen.
CANopen был изобретен для обеспечения легкого взаимодействия между устройствами в системах управления движением. Связь между устройствами реализована на высоком уровне, также поддерживается конфигурация устройства. Он широко используется в приложениях для управления движением, робототехники и управления двигателем.
CANopen управляется международной организацией CAN in Automation — CiA.CiA, основанная в Германии в 1992 году, является некоммерческой международной группой пользователей / производителей CAN. Они гордятся тем, что являются беспристрастной платформой для разработки протокола CAN и для продвижения имиджа технологии CAN.
CANopen предоставляет несколько дополнительных концепций, в том числе:
Три основные коммуникационные модели
- Главный / подчиненный — где один узел является «главным», а все остальные — подчиненными.
- Клиент / Сервер — несколько похож на главный / подчиненный, за исключением того, что узлы являются серверами данных по запросу к клиентскому узлу.
- Производитель / Потребитель — где определенные узлы настроены на автоматическое создание определенных видов данных, в то время как другие узлы настроены на их использование.
Два основных протокола связи
- SDO для конфигурации узла
- PDO для отправки данных в реальном времени
Профили устройств
- CiA 401 Модули ввода / вывода
- CiA 402 — управление движением для независимости от производителя
Словарь объектов
Существует OD (словарь объектов) для каждого устройства в сети.OD имеет стандартную конфигурацию данных, которая определяет конфигурацию каждого устройства в сети.
Состояния устройства
Главный узел может изменять или сбрасывать состояние устройств в сети.
Электронные таблицы данных (ЭЦП)
EDS — это стандартный формат файла для записей OD, позволяющий, например, сервисные инструменты для обновления устройств
Связь концепций и возможностей CANopen
Помимо CAN и работающих на нем протоколов, описанных в предыдущих разделах, существуют другие коммуникационные шины, которые используются для автомобильных приложений:
В современных автомобилях используется комбинация нескольких шин данных.Давайте посмотрим на каждый из них и посмотрим, как они соотносятся с CAN-шиной.
В современных транспортных средствах используется несколько автобусов
Image © 2020 Renesas Electronics Corporation
MOST (транспорт для мультимедийных систем)
Все ожидают, что их новая машина будет иметь лучшую и более функциональную развлекательную систему, чем их предыдущая машина. Старомодное радио AM / FM, которое было стандартом более 50 лет, было преобразовано, чтобы принимать съемные носители, от старых времен кассет и 8-трековых лент до компакт-дисков (CD) и съемных флэш-носителей.Сегодня основное внимание уделяется потоковой передаче контента с мобильных устройств, а также спутниковому радио (SIRIUS / XM® в Северной Америке).
Автобус MOST — транспорт для мультимедийных систем
Изображение предоставлено Pixabay
Media-Oriented Systems Transport ( MOST ) — это стандартная шина, используемая для соединения автомобильных развлекательных и информационных систем, разработанная партнерством автопроизводителей под названием «Сотрудничество MOST». Он предлагает скорости передачи данных 25, 50 и 150 Мбит / с.Но следует отметить, что это совокупные скорости, которые делятся между всеми узлами на шине.
MOST используется почти во всех автомобильных марках по всему миру. К кольцевой сети MOST можно подключить до 64 устройств, что позволяет легко подключать и отключать устройства. Возможны и другие топологии, в том числе виртуальные звезды. Существуют различные версии MOST , в том числе:
- MOST25 предлагает максимальную скорость потоковой передачи 23 МБ, которая на самом деле ограничена примерно 10 кБ / с из-за накладных расходов протокола и других ограничений.
- MOST50 удваивает пропускную способность MOST25.
- MOST150 утраивает пропускную способность MOST50 и добавляет физический уровень, который позволяет добавить Ethernet.
MOST сталкивается с растущей конкуренцией со стороны автомобильного Ethernet, что обсуждается ниже.
Автомобильный Ethernet
Новые технологии, такие как помощь водителю и даже функции автономного вождения / автономного транспортного средства, требуют все более высокой пропускной способности для работы.Эта потребность в скорости в сочетании с низкой стоимостью оборудования Ethernet стала важным фактором в продвижении автомобильного Ethernet среди автопроизводителей. Другие мотивы для автомобильного Ethernet включают скорость передачи, необходимую для LIDAR и других датчиков, необработанные данные камеры, данные GPS, данные карты и плоские дисплеи с более высоким и высоким разрешением.
Автомобильный Ethernet
Изображение © 2017 OPEN Alliance SIG
Но в отличие от наших комфортных домашних и офисных помещений, автомобиль подвержен гораздо более широкому диапазону температур, ударов и постоянных вибраций.Кроме того, существуют электромагнитные и радиопомехи, которые необходимо заблокировать, чтобы не создавать помех для критически важных данных, особенно тех, которые связаны с помощью водителю и предотвращением столкновений.
Термин «автомобильный Ethernet» не относится к конкретному стандарту как таковому. Он включает любую сеть на базе Ethernet, используемую в транспортных средствах. Он также относится к стандарту OPEN Alliance BroadR-Reach, разработанному Broadcom, и к IEEE 802.3bw-2015, также известному как 100Base-T1.
Несмотря на очевидные преимущества скорости и всемирной популярности, до недавнего времени Ethernet использовался только для диагностических приложений в автомобилях — другими словами, когда автомобиль находился в рабочем состоянии и не двигался.Почему? Из-за его восприимчивости к EMI (электромагнитным помехам) и RFI (радиочастотным помехам), отсутствию присущей детерминированной временной синхронизации и склонности к выходу из строя разъема из-за вибрации. Например, стандартные разъемы CAT5 не могут выжить в автомобилях при нормальном использовании.
Однако эти проблемы решаются рабочими группами IEEE 802.3 и 802.1. Тем временем производитель микросхем Broadcom разработал BroadR-Reach ™, который адаптирует технологию Ethernet для использования в автомобилях.BroadR-Reach обеспечивает скорость 100 Мбит / с при использовании неэкранированной витой пары на расстоянии до 15 метров или до 40 метров, если к кабелям добавлен экран.
Топология автомобильного Ethernet BroadR-Reach. Микросхемы Broadcom PHY
одновременно отправляют и принимают данные в двух направлениях
BroadR-Reach был принят некоторыми автопроизводителями для использования в информационно-развлекательных системах, системах помощи водителю, бортовой диагностике и даже в приложениях ADAS. Он предлагает скорость передачи данных 100 Мбит / с на порт, что намного выше, чем, например, совокупная скорость MOST 150 Мбит / с.
Стандарт BroadR-Reach контролируется альянсом OPEN (One-Pair Ether-Net), который выступает за внедрение автомобильного Ethernet.
Ethernet AVB (мост аудио-видео) — это стандарт IEEE AVB1.0. Он приближается к использованию с камерами и мультимедийными системами. AVB2.0 предназначен для приложений управления транспортными средствами. AVB продвигается Альянсом AVnu.
Ethernet TSN (Time-Sensitive Networking) — это стандарт IEEE 802.1, разработанный для обеспечения детерминированного обмена сообщениями через стандартный Ethernet.Не протокол как таковой, TSN — это стандарт, реализованный на уровне 2 Ethernet OSI, то есть на уровне данных (AVB также является стандартом уровня 2).
В качестве расширения Ethernet AVB, описанного выше, TSN фокусируется на временной синхронизации, планировании и формировании пакетов, которые необходимы для приложений самоуправляемых транспортных средств. Поскольку TSN полностью посвящен «времени», протоколы точного времени (PTP) IEEE 802.1AS и IEEE 802.1ASRev были выбраны для обеспечения общей концепции времени на всех устройствах.
По данным Gartner, в 2017 году в потребительских транспортных средствах было установлено в общей сложности 19,3 миллиона портов Ethernet. К 2020 году эта цифра увеличится до 122,8 миллиона, а к 2023 году эта цифра, по прогнозам, удвоится.
ОТПРАВЛЕН SAE-J2716
SENT SAE-J2716 (односторонняя полубайтовая передача) был разработан как недорогая альтернатива протоколу CAN или LIN. Это односторонний протокол передачи, который позволяет датчикам отправлять свои данные в ЭБУ.
Данные кодируются с использованием импульсной кодовой модуляции (ИКМ) и передаются по одному проводу.Всего имеется три провода: сигнальный, заземляющий и силовой. Данные кодируются 4-битными «полубайтами».
Типичное сообщение SENT — 32 бита (8 полубайтов), состоит из:
- Данные сигнала: 24 бита (6 полубайтов)
- Обнаружение ошибки CRC: 4 бита (1 полубайт)
- Информация о состоянии: 4 бита (1 полубайт)
Фрейм сообщения SAE-J2716
Также возможно сконфигурировать сообщения из 20 бит (5 полубайтов), где данные только 12-битные (3 полубайта).
Благодаря модуляции данных, SENT идеально подходит для использования в среде с электрическими помехами.
Системы Dewesoft поддерживают данные SENT SAE-J2716, используя каналы счетчиков для считывания сигнала SENT, передаваемого датчиком. Два быстрых канала и любое количество медленных каналов, которые могут быть обнаружены автоматически. Инженеры могут декодировать сигналы SENT от нескольких датчиков одновременно, когда каждый датчик использует свой счетчик, путем добавления нескольких окон модулей. Каналы SENT доступны как каналы Dewesoft.
FlexRAY
FlexRAY — это протокол, используемый для динамических автомобильных приложений, таких как управление шасси. Он был создан в 2005 году консорциумом FlexRAY, но с тех пор стандартизирован в соответствии с ISO 17458-1 до 17458-5.
FlexRAY передает данные по одному или двум неэкранированным кабелям витой пары. Он работает со скоростью 10 Мбит / с и поддерживает одно- или двухпроводные конфигурации. Поддерживаются шинные, звездообразные и гибридные сетевые топологии со скоростью до 10 Мбит / с. Дифференциальная сигнализация снижает уровень шума без необходимости использования экранированных кабелей, что увеличивает стоимость и вес.
Как и в случае с CAN, только один узел может писать в шину FlexRAY одновременно. CAN использует бит арбитража, чтобы определить, какие данные получают приоритет и которым разрешено продолжить. FlexRAY, с другой стороны, использует метод множественного доступа с временным разделением (TDMA), при котором каждый узел с синхронизацией по времени должен ждать своей очереди для отправки сообщения. Это позволяет избежать коллизий и обеспечивает более высокую общую пропускную способность данных по шине из-за высокой общей скорости передачи данных по шине.
FlexRAY часто реализуется в классической многоточечной топологии, совместно используемой LIN и CAN, однако его также можно настроить в топологии «звезда».Топология «звезда» имеет то преимущество, что не позволяет неисправности проводки затронуть более одного узла. FlexRAY также может быть реализован в смешанной топологии, как показано ниже.
Топологии сети: слева: многоточечная, по центру: звезда, справа: смешанная
FlexRAY чаще всего используется для высокопроизводительных силовых агрегатов, систем безопасности и активного управления шасси. FlexRAY дороже реализации CAN-шины.
Однако, когда используются двойные пары параллельных линий данных, это обеспечивает избыточность: когда линия повреждена, вторая линия может занять ее.Это важно для критически важных приложений, таких как рулевое управление и торможение. В некритичных приложениях FlexRAY обычно используется одна витая пара.
Системы Dewesoft могут легко получать данные FlexRAY с помощью опции импорта библиотеки FIBEX. Доступен программный плагин для поддержки всех интерфейсных карт Vector FlexRay.
Шина LIN — локальная межкомпонентная сеть
Шина
LIN — недорогая альтернатива шине CAN. Это очень просто, но обязательно ограничено одним главным и 15 подчиненными узлами.LIN — это последовательная однонаправленная система обмена сообщениями, в которой ведомые устройства прослушивают адресованные им идентификаторы сообщений.
Из-за низкой пропускной способности и ограничений по количеству узлов LIN обычно используется для управления небольшими электродвигателями и элементами управления. LIN ограничен скоростью передачи данных 19,2 кбит / с или 20 кбит / с.
Регулируемые элементы управления автокреслом в Mercedes-Benz
Изображение предоставлено Pixabay
LIN — это однопроводная сеть, определенная стандартом ISO 9141. Она используется для приложений с низкой пропускной способностью, таких как электрические стеклоподъемники, освещение, дверные замки, системы ввода карточек-ключей, электрические зеркала, сиденья с электроприводом и т. Д.
Плагин шины LIN для DewesoftX позволяет инженерам подключаться и прослушивать обмен данными в нескольких сетях LIN. Используя оборудование LIN BUS марки Vector, он имитирует подчиненные устройства, работающие только с прослушиванием, которые прослушивают все данные, передаваемые по шине. Декодирование может быть выполнено в трех разных формах:
- Аналоговые данные с широкими возможностями масштабирования
- Дискретные данные
- Смесь обоих
Плагин поддерживает импорт конфигурации из файлов описания LIN (LDF).Для чтения шины LIN требуется карта Vector LIN BUS.
Сравнение CAN с автобусами других транспортных средств
| LIN | CAN | CAN FD | FlexRay | МОСТ | Ethernet | |
|---|---|---|---|---|---|---|
| Скорость | 10-20 кбит / с | 1 Мбит / с | 8 Мбит / с | 10 Мбит / с | 150 Мбит / с (общая) | 100 Мбит / с (на узел) |
| Размер данных | 8 B | 8Б | 64 B | 254 B | 370 B | 1500 В |
| Кабели | однопроводной | UTP * | UTP | UTP | UTP или оптоволоконный | UT |
| Топология | Автобус | Автобус | Автобус / пассивная звезда | Автобус / Звезда / Смешанный | Кольцо | Звезда / Дерево / Кольцо |
| Где используется | Датчики, исполнительные механизмы (фары, зеркала и т. Д.) | Магистраль, Кузов, Шасси, Трансмиссия | Кузов, трансмиссия, распределенное управление, шасси | Высокопроизводительная трансмиссия, Магистраль, Электропроводка, Шасси | Информационно-развлекательные системы | Диагностика, программирование ЭБУ, информация и развлечения |
| Обнаружение ошибок | 8-битный CRC | 15-битный CRC | 17- или 21-битный CRC | 24-битный CRC | CRC | 32-битный CRC |
| Резервирование | НЕТ | НЕТ | НЕТ | Есть | Есть | НЕТ |
| Детерминизм | НЕТ | НЕТ | НЕТ | Есть | Есть | Не присуще |
| Стоимость | $ | $$ | $$$ | $$$ | $$ | $$ |
Сравнение автомобильных автобусов на высоком уровне
Примечания: * UTP = неэкранированная витая пара
Как и в случае любой сетевой и интероперабельной системы, выбор автомобильной шины лучше всего зависит от требований приложения, с учетом затрат и прогнозируемых отраслевых требований и тенденций.Ясно, что автопроизводители не хотят внедрять старые автобусы в новые конструкции, когда есть лучшие автобусы по эквивалентной или более высокой стоимости развертывания.
Dewesoft CAN Bus DAQ Systems
Интерфейсы шины CAN, входящие в стандартную или дополнительную комплектацию систем Dewesoft, обеспечивают высокий уровень возможностей, а также возможность расширения до дополнительных протоколов.
Модуль Dewesoft SIRIUS DAQ, записывающий аналоговые, цифровые данные и данные транспортного средства по шине CAN
Все CAN-интерфейсы Dewesoft имеют гальваническую развязку , защищающую прибор и подключенные устройства от контуров заземления и других электрических помех.Все интерфейсы CAN Dewesoft используют высокоскоростной стандарт CAN 2.0b . Dewesoft также предлагает устройство CAN FD .
Все интерфейсы CAN Dewesoft могут как читать, так и записывать сообщения CAN, что позволяет инженерам передавать сообщения на шину для запроса данных от устройств CAN в сети и т. Д.
Все интерфейсы CAN Dewesoft можно настроить за секунды, поскольку прилагаемое программное обеспечение для сбора данных DewesoftX может импортировать файлы DBC. Файлы DBC — это стандартный формат, который позволяет инженерам разбивать поток данных на отдельные каналы с именами, масштабированием, соответствующими инженерными единицами и т. Д.
Главный экран настройки DewesoftX CAN
При нажатии кнопки «Настройка» справа от любого ряда сообщений открывается экран настройки канала CAN, показанный ниже:
Экран настройки канала шины CAN DewesoftX, показывающий пять различных каналов, содержащихся в одном сообщении
DewesoftX упрощает настройку каналов CAN. Программа может импортировать и экспортировать файлы CAN DBC или XML. Файлы DBC являются общими файлами для сообщений CAN и определения каналов.После импорта программа автоматически настроит все доступные каналы CAN и расшифрует сообщения CAN.
Возможности программного обеспечения CAN DewesoftX
- Расширенная запись, хранение и анализ CAN
- Мониторинг и декодирование сообщений CAN в режиме реального времени
- Расшифровка сообщений CAN в автономном режиме
- Визуальный дисплей для отображения данных CAN
- Онлайн и офлайн математический анализ каналов CAN
- Импорт и экспорт файлов CAN DBC
- OBDII на CAN, J1939 и поддержка XCP / CCP
- Функция передачи CAN
Интерфейсы CAN-шины Dewesoft
Компания Dewesoft была среди первых производителей систем сбора данных, которые полностью реализовали интерфейсы шины CAN со своей системой сбора аналоговых данных.Почти каждая система Dewesoft DAQ имеет по крайней мере один встроенный интерфейс CAN-шины в стандартной комплектации, а дополнительный выделенный CAN-интерфейс может быть добавлен внутренне, внешне или и тем, и другим, при сохранении идеальной синхронизации.
Многоканальные интерфейсы CAN и CAN FD Dewesoft
Еще в 2008 году была представлена оригинальная модель DEWE-43, оснащенная двумя высокоскоростными интерфейсами CAN-шины в качестве стандартной функции. Очень важно знать, что данные CAN, поступающие в эти порты, полностью аппаратно синхронизируются с аналоговыми данными, а также с данными счетчика / цифрового входа.Интерфейс CAN Dewesoft также гальванически изолирован, что защищает прибор и саму шину от контуров заземления и других электрических проблем.
DEWE-43A, с 8 многофункциональными аналоговыми входами, 8 счетчиками / таймером / цифровыми входами и 2 изолированными высокоскоростными интерфейсами шины CAN
Менее чем через год после своего появления, DEWE-43 был удостоен награды NASA TECH BRIEFS Reader’s Choice Product of the Year за инновации в объединении абсолютной мощности и возможностей сбора данных в невероятно компактном приборе.
Сегодня Dewesoft предлагает поддержку нескольких стандартных автомобильных интерфейсов для анализа и проверки данных автомобильной шины. Данные могут быть захвачены со всех поддерживаемых интерфейсов и синхронизированы с другими источниками, такими как аналоговые, видео и другие.
Dewesoft DAQ Systems со встроенными интерфейсами CAN
Как упоминалось ранее, почти каждая система Dewesoft DAQ имеет по крайней мере один встроенный порт CAN в стандартной комплектации, и все системы могут быть оснащены CAN, если он не является стандартным, согласно этой таблице:
* Внешне означает, что можно добавить один или несколько внешних и синхронизируемых интерфейсов CAN.К ним относятся DS-CAN2, SIRIUSim-4X-CAN, SIRIUSf-8x-CAN и KRYPTONi-1xCAN-FD.
Внешние синхронизируемые интерфейсы CAN
В дополнение к портам CAN, встроенным почти в каждую систему сбора данных Dewesoft, доступны отдельные синхронизируемые интерфейсы CAN с 2, 4 и 8 портами. Они подключаются либо к компьютеру под управлением Windows, на котором установлено программное обеспечение Dewesoft X, либо к системе Dewesoft DAQ через USB и кабель синхронизации.
Слева направо: DS-CAN2, SIRIUSim-4xCAN, SIRIUSf-8x-CAN
Эти модули имеют 2, 4 и 8 портов CAN соответственно
KRYPTONi-1xCAN-FD Модуль
Последний представитель семейства CAN-шин Dewesoft — это KRYPTONi-1xCAN-FD .Это однопортовое устройство CAN FD, которое подключается к системе сбора данных через EtherCAT®. Он поддерживает высокую скорость передачи данных CAN до 8 Мбит / с. Кроме того, CAN FD поддерживает протокол связи CAN 2.0, а также специальные протоколы, такие как J1939.
Размер модуля KRYPTONi 1xCAN-FD составляет всего 62 x 56 x 29 мм (2,44 x 2,20 x 1,14 дюйма)
KRYPTONi-1xCAN-FD имеет гальванически развязанных линий связи и изолированное питание датчика с напряжением +5 В и +12 В.Предел мощности питания датчика — 1,4 Вт.
Поскольку этот модуль является членом отмеченной наградами линейки продуктов KRYPTON ONE, он может выдерживать экстремальные условия окружающей среды, такие как диапазон рабочих температур от -40 ° C до +85 ° C (от -40 до + 185 ° F), и защищен от пыли и жидкостей согласно IP67.
KRYPTONi-1xCAN-FD поставляется в стандартном шасси KRYPTON ONE с входным разъемом DSUB9.
Подробнее Чтение:
Протокол сети контроллеров (CAN BUS)
Каждый контроллер CAN на шине будет пытаться обнаружить ошибки, описанные выше, в каждом сообщении.Если обнаружена ошибка, обнаруживающий узел передает флаг ошибки, тем самым уничтожая трафик шины. Другие узлы обнаружат ошибку, вызванную флагом ошибки (если они еще не обнаружили исходную ошибку), и предпримут соответствующие действия, т. Е. Отклонят текущее сообщение.
Каждый узел поддерживает два счетчика ошибок: счетчик ошибок передачи и счетчик ошибок приема. Существует несколько правил, регулирующих увеличение и / или уменьшение этих счетчиков. По сути, передатчик, обнаруживающий неисправность, увеличивает свой счетчик ошибок передачи быстрее, чем узлы прослушивания увеличивают свой счетчик ошибок приема.Это потому, что велика вероятность того, что виноват передатчик!
Узел запускается в активном режиме с ошибкой. Когда любой из двух счетчиков ошибок поднимается выше 127, узел переходит в состояние, известное как пассивная ошибка, а когда счетчик ошибок передачи превышает 255, узел переходит в состояние отключения шины.
- Узел «Активная ошибка» передает флаги активных ошибок при обнаружении ошибок.
- Узел с пассивной ошибкой будет передавать флаги пассивной ошибки при обнаружении ошибок.
- Узел, который отключен от шины, вообще ничего не передает по шине.
Правила увеличения и уменьшения счетчиков ошибок несколько сложны, но принцип прост: ошибки передачи дают 8 баллов ошибок, а ошибки приема дают 1 балл ошибок. Правильно переданные и / или полученные сообщения вызывают уменьшение счетчика (ов).
Пример (немного упрощенный). Предположим, что у узла A на шине плохой день. Всякий раз, когда A пытается передать сообщение, он терпит неудачу (по любой причине).Каждый раз, когда это происходит, он увеличивает свой счетчик ошибок передачи на 8 и передает флаг активной ошибки. Затем он попытается повторно передать сообщение … и произойдет то же самое.
Когда значение счетчика ошибок передачи превышает 127 (т. Е. После 16 попыток), узел A переходит в состояние пассивной ошибки. Разница в том, что теперь он будет передавать по шине флаги пассивной ошибки. Флаг пассивной ошибки состоит из 6 рецессивных битов и не уничтожает другой трафик шины, поэтому другие узлы не услышат жалобу A на ошибки шины.Однако A продолжает увеличивать свой счетчик ошибок передачи. Когда он поднимается выше 255, узел A наконец сдается и отключается от шины.
Что другие узлы думают об узле A? — Для каждого активного флага ошибки, переданного A, другие узлы увеличивают свои счетчики ошибок приема на 1. К тому времени, когда A переходит в состояние отключения шины, другие узлы будут иметь счет в своих счетчиках ошибок приема, который значительно ниже предела для Пассивная ошибка, то есть 127. Это количество будет уменьшаться на единицу для каждого правильно полученного сообщения.Однако узел A останется отключенным от шины.
Большинство контроллеров CAN предоставляют биты состояния (и соответствующие прерывания) для двух состояний:
- «Предупреждение об ошибке» — один или оба счетчика ошибок выше 96
- Bus Off, как описано выше.
Некоторые — но не все! — контроллеры также предоставляют бит для состояния пассивной ошибки. Некоторые контроллеры также предоставляют прямой доступ к счетчикам ошибок.
Привычка CAN-контроллера автоматически повторно передавать сообщения при возникновении ошибок временами может раздражать.На рынке есть по крайней мере один контроллер (SJA1000 от Philips), который позволяет полностью вручную управлять обработкой ошибок.
Общие сведения о шине CAN и регистраторах CAN — Sewell Direct
Что такое технология CAN-шины?
По мере того, как автомобили и другие транспортные средства становятся более экологически чистыми и технологически продвинутыми, становится все более важным иметь централизованную сетевую систему. Эта система соединяет все модули, работающие по всему автомобилю, так что они могут работать вместе, чтобы работать эффективно и результативно; например, двигатель сообщает о скорости автомобиля трансмиссии, которая, в свою очередь, должна сообщать другим модулям, когда следует переключать передачи.Соединение всех этих отдельных модулей друг с другом стало слишком сложным, поэтому для эффективного управления автомобилем потребовалась центральная сетевая система. Сеть контроллеров, или шина CAN, является одним из этих центральных сетевых протоколов, используемых в транспортных средствах без главного компьютера.
Краткая история CAN-шины
Robert Bosch GmbH, немецкая инженерная и электронная компания, специализирующаяся на автомобильной промышленности, начала работу над протоколом шины CAN в 1983 году, а затем представила его на конгрессе Общества инженеров автомобильной промышленности в 1986 году.В том же году компания продвигала производство купе BMW 850 как первого автомобиля с системой шины CAN. Поскольку проводка электроники в автомобиле была значительно сокращена благодаря внедрению шины CAN, само купе весило более чем на 100 фунтов меньше, чем предыдущие модели автомобиля, а датчики работали значительно быстрее.
С тех пор Общество автомобильных инженеров потребовало, чтобы с 2008 года 100 процентов всех автомобилей, продаваемых в США, были оснащены протоколом шины CAN, и аналогичный мандат был введен в Европе.
Преимущества CAN-шины
Помимо создания более легких транспортных средств, протокол шины CAN имеет много других существенных преимуществ. За счет подключения всех модулей в автомобиле к одной центральной линии система управления упрощается и легче регулируется. Такая конструкция позволяет любому подключенному модулю предупреждать главный контроллер о событии, которое по мере его возникновения заставляет остальную систему реагировать соответствующим образом. Общая линия данных позволяет подключать несколько модулей с меньшими усилиями, что значительно снижает вероятность ошибки.
Если один модуль на шине CAN выходит из строя, это не обязательно вызывает отказ других модулей. Если две системы не связаны напрямую и одна не может работать без другой, исправные модули будут продолжать работать безупречно, несмотря на потерю одного неисправного модуля. Это делает всю систему более безопасной.
Кроме того, диагностика автомобиля проще и точнее из-за специализированного и автономного характера модулей. Теперь диагностика может точно и быстро определить точную причину отказа модуля.Когда один модуль нуждается в обслуживании, этот модуль можно просто выбрать и заменить, а не разбирать весь автомобиль.
Одним из наиболее значительных преимуществ технологии шины CAN является соотношение цены и производительности. В настоящее время шина CAN является одной из самых доступных сетевых систем, а также одной из самых надежных, что делает ее основным экономичным выбором производителей автомобилей во всем мире.
Шина CAN
предлагает простой интерфейс для подключения дополнительного узла.Узел можно использовать для диагностики, перепрограммирования, мониторинга и многого другого. Было создано множество инструментов для подключения к CAN-шине. В настоящее время существуют решения для подключения USB к CAN, беспроводной связи с CAN, PCIx с CAN и даже регистратора шины CAN.
Применение CAN-шины
Хотя протокол шины CAN был представлен для использования в автомобилях, сегодня эта система используется в нескольких других сетевых приложениях. Благодаря простой системе объединения отдельных модулей в единую центральную линию управления, многие компании используют преимущества протокола CAN-шины на сборочных линиях, промышленных транспортных средствах, медицинском оборудовании и любом другом оборудовании, которое использует несколько модулей, которые должны взаимодействовать друг с другом.
Автономное промышленное оборудование, а также мобильные машины все чаще интегрируют протокол шины CAN из-за встроенного управления в систему. Благодаря надежности и эффективности протокола в медицинском и военном оборудовании также наблюдается рост использования шины CAN. Поскольку оборудование становится все более сложным, применение системы CAN-шины, вероятно, будет расти вместе с технологией.
Преимущества CAN Logger
Регистратор CAN — это регистратор для системы шины CAN.Преимущества регистратора CAN делают его одним из лучших решений для регистрации информации. Это может быть ценным инструментом для поиска и устранения неисправностей и удаленной диагностики. Вся информация, передаваемая по сети CAN Bus, будет храниться в регистраторе. Регистратор CAN позволяет отслеживать ошибки, ошибочные сообщения или рассинхронизацию связи. Отслеживание поможет ускорить ремонт техники с помощью шины CAN. Ниже перечислены основные преимущества регистратора CAN:
- Регистратор CAN может записывать все ваши данные вместо портативного компьютера.
- Легкое устройство, не жертвующее функциональностью. Включая простую в использовании программу настройки, регистраторы могут быть настроены для хранения любой необходимой информации во внутренней памяти или на SD-карте.
- Простой дизайн позволяет любому использовать его и больше времени на ремонт, а не на регистрацию информации.
Kvaser Memorator серии
Серия Kvaser Memorator стала самым популярным CAN-логгером. В эту серию входят четыре разные модели: Memorator Light HS, Memorator R Semipro, Memorator Professional HS / HS и Eagle.Серия Kvaser Memorator предлагает возможность делать отметки времени для всех данных, фиксировать нерегулярные неисправности в полевых условиях или выполнять удаленную диагностику. Информация может храниться внутри CAN-логгера или выгружаться. Он также предлагает гальваническую развязку и резервную батарею для предотвращения потери данных. Посмотреть самую популярную подборку Kvaser:
| Светильник Memorator HS | Memorator R Semipro | Memorator Professional HS / HS | Орел | |
|---|---|---|---|---|
| Деталь # | 00513-6 | 00490-0 | 00351-4 | 00567-9 |
| Канал | 1 | 2 | 2 | 2 |
| Память | Внутренний 1 ГБ | Съемный 4 ГБ | Съемная SD-карта (128-16 ГБ) | Съемная SD-карта (128–32 ГБ) |
| Программирование через T-скрипт | № | № | № | Есть |
| Степень защиты IP67 | № | Есть | № | № |
| Гальваническая развязка | № | Есть | Есть | Есть |
| Поддерживает режим USB-to-CAN | № | Есть | Есть | Есть |
| Автопередача | № | Есть | Есть | Есть |
| Автобод | Есть | № | № | № |
| Резервная батарея | Есть | Есть | Есть | Есть |
| Битрейт | 10-1000 кбит / с | 20-1000 кбит / с | 10-1000 кбит / с | 50-1000 кбит / с |
| Макс.скорость отправки сообщений | 0 | 20 000 | 20 000 | 20 000 |
| Макс.скорость приема сообщений | 20 000 | 20 000 | 20 000 | 20 000 |
| Создание кадра ошибки | № | Есть | Есть | Есть |
| Обнаружение кадра ошибки | Есть | Есть | Есть | Есть |
| Разрешение отметки времени (мкс) | 2 | 2 | 2 | 1 |
| Синхронизация часов | НЕТ | Magisync | Magisync | НЕТ |
| Функция бесшумного режима | Всегда бесшумно | Есть | Есть | Есть |
| Вес (граммы) | 150 | 150 | 150 | 150 |
| Размеры | 2×3.5×1 в | 1,2×7,9x,8 дюйма | 2×3,5×1 дюйм | 2×3,5×1 дюйм |
Шина CAN
стала поистине революционной для автомобильной промышленности. Фактически, сейчас это неотъемлемая часть автомобильного производства. Регистраторы CAN, особенно серия Kvaser Memorator, значительно упростили процесс поиска и устранения неисправностей.
Почему вся суета вокруг CAN-шины?
Интернет вещей — все более связная природа всех видов встраиваемых устройств — продолжает расширяться.Было сделано много прогнозов, что более 50 миллиардов «вещей» будут подключены к Интернету, облаку и друг другу в 2020 году, а среднее количество подключенных устройств на одну семью составит 50. По общему мнению, этот прогноз сбылся. Это число включает в себя все устройства, машины и датчики, которые существуют повсюду в нашем современном мире, и оно будет только расти. Мы уже говорили о потенциальном влиянии технологий Интернета вещей и о различных способах доступа к облаку, влияющих на проектирование и развертывание оборудования.Но есть еще один аспект системной связи, который не менее важен для будущего этих все более сложных технологий — шина CAN.
То, как устройства, датчики и системы обмениваются данными на местном уровне, столь же важно для производителей оборудования, поставщиков и интеграторов, как и способ обработки информации в облаке. Несмотря на то, что существует множество коммуникационных протоколов и методов, позволяющих одной системе «общаться» напрямую с другой, мы наблюдаем растущий интерес к использованию связи по CAN-шине для широкого спектра промышленных приложений.
Но почему CAN, что означает Controller Area Network, внезапно стал таким привлекательным вариантом для промышленных вычислений? Каковы неотъемлемые преимущества использования этого конкретного метода связи во встроенных системах?
Что такое CAN-шина?
CAN-шина — это протокол на основе сообщений, позволяющий обмениваться данными между отдельными системами, устройствами и контроллерами в сети. В общем, шина — это система связи, которая передает данные между компонентами. Сеть контроллеров позволяет передавать данные в системе, не подключенной иным образом к устройству сетевого хостинга.Например, OnLogic работал с клиентами над оснащением сельскохозяйственного оборудования, такого как комбайны и другие сложные элементы техники, оборудованием с поддержкой CAN, что позволяет различным компонентам оборудования эффективно и действенно передавать информацию друг другу.
После своего появления в середине 80-х годов прошлого века связь по шине CAN вышла далеко за рамки автомобильной промышленности, где она впервые получила широкое распространение. До того, как шина CAN приобрела популярность, жгуты проводов транспортных средств могли содержать несколько миль проводов, со связками из 8 или более проводов, необходимых для передачи различных сигналов к и от взаимосвязанных систем транспортного средства.В отличие от этого, в шине CAN используется высокоскоростная (25 кбит / с — 1 Мбит / с) система проводки на основе витой пары, что значительно сокращает количество проводов, необходимых для эффективного взаимодействия компонентов системы.
Хотя CAN по-прежнему широко используется в современных бортовых компьютерах, таких как серия Karbon от OnLogic, шина CAN теперь также внедряется в широкий спектр встроенных и промышленных приложений, от сборочных линий и медицинского оборудования до автоматизации зданий. и установки контроля доступа.
Каковы преимущества CAN-шины?
Интегрированная связь по шине CAN предлагает ряд преимуществ для пользователей промышленных ПК, в том числе:
- Скорость — Скорость передачи данных CAN намного превосходит традиционные аналоговые жгуты проводов, поскольку несколько сообщений могут быть отправлены одновременно на все подключенные устройства, датчики или исполнительные механизмы .
- Гибкость — Благодаря своей спаренной, одножильной, двухпроводной структуре шина CAN обеспечивает повышенную гибкость при установке и обслуживании.Системы, подключенные к CAN, не только содержат значительно меньше проводов, что упрощает их установку, но и добавление новых компонентов в систему требует гораздо меньших затрат на разработку, а также значительно снижает сложности при диагностике и решении проблем с сигналом.
- Надежность — Помимо того, что для связи по CAN гораздо меньше чувствительности к магнитным помехам, чем для аналоговой проводки, для обмена данными по CAN требуется меньше кабелей и разъемов, что значительно сокращает количество точек отказа.
- Стоимость — Низкие затраты на оборудование и минимальные требования к обработке сигналов делают CAN идеальным решением для встроенных приложений, требующих многопроцессорной связи с ограниченным бюджетом.
Как шина CAN используется в промышленных вычислениях?
В автоматизированной промышленной установке шина CAN чаще всего используется как часть распределенной системы управления, соединяя жизненно важные системы, которые могут быть распределены по всему объекту. Обычно человеко-машинный интерфейс (HMI) позволяет оператору взаимодействовать с системой. Оттуда программируемые логические контроллеры (ПЛК) передают эти команды через интерфейс шины CAN на датчики, исполнительные механизмы, двигатели или другие механические системы, которые выполняют желаемое действие.
CAN часто используется на производственных линиях в производственных средах, позволяя операторам и оборудованию эффективно взаимодействовать на каждом этапе процесса сборки. Автоматизация зданий — еще одна область, в которой скорость, низкая стоимость и простота установки сделали связь по шине CAN популярным выбором для подключения систем контроля доступа, безопасности и защиты окружающей среды.
Будущее связи по CAN-шине
По мере того, как Интернет вещей продолжает расти и охватывать все более и более сложные системы, стандартизация способа связи каждого компонента со следующим будет иметь жизненно важное значение для обеспечения совместимости, расширяемости и долговечности установки.Здесь, в OnLogic, мы работаем с клиентами над реализацией связи по шине CAN в широком спектре заказных встраиваемых систем, и мы по-прежнему видим светлое будущее для этой технологии, особенно в производственных средах и в современных установках автоматизации зданий.
Примечание. Первоначально этот пост был опубликован 10 июля 2014 г. Он был обновлен 10 июля 2020 г. примерно каждый день, но это одна из самых важных частей любого современного автомобиля.Проще говоря, этот электронный коммутатор — это то, что поддерживает связь всех систем вашего автомобиля друг с другом, чтобы ваш автомобиль или грузовик продолжали работать в отличной форме.
Как работает эта автомобильная магия? Прочтите основы работы с шиной CAN.
Сеть, автомобильный стиль
Шина CAN используется не только в мире автомобилей — на самом деле это стандартная шина (сеть контроллеров), которую можно найти в различных приложениях. «Шина» — это термин, относящийся к любой системе связи, которая может перемещать данные между одним компонентом и другим.Шина CAN впервые появилась в 80-х годах, но только в начале 90-х в транспортных средствах появилось достаточно контроллеров, датчиков и микропроцессоров, чтобы потребовалась выделенная шина для обработки всего трафика данных. Переход на шину CAN также позволил автомобильным компаниям сократить количество проводов от каждого автомобиля, поскольку система упростила методы электронного управления, которые использовались до этого момента.
Как это работает?
Система шины CAN состоит из первичного контроллера, который контролирует все системы автомобиля из центра.Это упрощает отслеживание неисправностей, а затем диагностику конкретных проблем, вместо того, чтобы вручную опрашивать многочисленные субконтроллеры, распределенные по автомобилю или грузовику. Это также снижает количество точек отказа: благодаря единой линии передачи данных, обрабатывающей все коммуникации, нет необходимости беспокоиться о том, что несколько соединений могут выйти из строя и вызвать проблемы. Кроме того, конструкция позволяет основной системе продолжать работу даже в случае отказа подсистемы, что является уровнем избыточности, которого было труднее достичь при использовании дискретных контроллеров.
OBD-II
Внедрение CAN-шины позволило автомобильным компаниям продвинуться вперед с протоколами бортовой диагностики, известными как OBD-I и текущим стандартом OBD-II. OBD-II предлагает набор стандартизированных кодов проблем, которые могут быть легко интерпретированы механиками и даже владельцами при попытке диагностировать проблему. Порт данных, через который осуществляется доступ к кодам OBD-II, также служит точкой входа для обновлений программного обеспечения бортовых систем и компьютеров транспортного средства — что было бы невозможно, и для чего потребовалась бы фактическая физическая замена компьютерных микросхем до того, как наличие системы CAN-шины.
Ознакомьтесь со всеми продуктами для систем электрооборудования и зажигания
Фото любезно предоставлено Wikimedia Commons.
Основы CAN-Bus — Решения KMP Drivetrain
Автор: Тимон Альферинк
24 августа 2017
В этом посте я объясню самые основы сети CAN-Bus, которая используется в автомобилях Motorsport.Это может быть полезно для людей, которые когда-либо слышали это имя, но никогда не знали, что это такое или что оно делает. В Интернете много технической информации, но моя цель — объяснить ее на очень простом языке. В этом посте я беру в качестве примера 11-битную спецификацию высокоскоростной (1 Мбит / с) CAN2.0A.
CAN означает C ontroller A rea N etwork. Это метод, позволяющий микроконтроллерам связываться друг с другом по сети (шине). Сравните это с Ethernet (LAN), стандартом, позволяющим компьютерам также обмениваться данными друг с другом.
Оборудование CAN-Bus
Линия шины — это витая пара с согласующим резистором (120 Ом) на каждой стороне. Один провод называется CAN High, а другой — CAN Low. Оба провода нужны для правильной связи.
Устройство, подключенное к шине, называется «Узлом». Для связи в сети CAN всегда требуются два или более узла. В автоспорте вы обычно найдете от 3 до 10 узлов на автобусе.
Узел имеет как минимум встроенный микроконтроллер и контроллер CAN.Контроллер CAN преобразует цифровую информацию в сообщения на шине. Сравните это с азбукой Морзе. Информация поступает, CAN-контроллер переводит ее и отправляет сообщение на определенном языке, а другой CAN-контроллер снова получает информацию.
Микроконтроллер обрабатывает такую информацию, как входы или выходы датчиков для включения света или исполнительного механизма. Микроконтроллер также может обрабатывать информацию для управления приборной панелью или другим видом связи.
Сообщения CAN-Bus
Сообщение CAN-Bus содержит все виды данных, но основными являются идентификатор и кадр сообщения (8 байтов).Представьте себе поезд: поезд движется с определенной скоростью (1 Мбит / с) по рельсам (автобусу) и имеет несколько вагонов (удостоверений личности). На каждой железнодорожной станции (Узле) вы можете поставить больше вагонов на поезд или посмотреть, кто в другом вагоне. Вагон (ID) с наименьшим номером имеет наивысший приоритет и идет первым. Узел может отправлять по шине несколько идентификаторов.
В вагоне (ID) есть 8 личных комнат (байтов) по 8 мест (бит) в каждой. Каждое место (бит) может иметь значение 0 или 1. Полная отдельная комната с 8 местами может иметь 256 различных комбинаций, что является максимальным значением в 1 байт.На нормальном языке; 1 идентификатор может содержать несколько сигналов, таких как обороты, дроссельная заслонка, температура и т. Д. Если каждый сигнал имеет 1 байт (8 бит), идентификатор может содержать 8 сигналов.
Если вы хотите отправить сообщение как «8000 об / мин», максимальная точность для 1 помещения (байта) будет 5000 мВ / 256 = 31 об / мин. Передача сигнала будет происходить с шагом 31 об / мин. Чтобы получить более высокую точность, можно использовать 2 комнаты (байта) для 1 сообщения. Две комнаты могут иметь максимальное значение 62236. Если вы отправляете сообщение «8000 об / мин» более 2 байтов, шаги будут 8000/65536 = 0,12 об / мин.
Важно понимать, почему иногда для передачи сигнала используются 1 бит, 1 байт или 2 байта.
Чтобы получить сигнал, который вы ищете, вам необходимо иметь идентификатор, старший байт, младший байт и коэффициент количественной оценки. Q-фактор используется для преобразования значения сообщения (без единицы измерения) в понятное значение (такие единицы, как об / мин, В, бар).
Важная информация
Сколько ID (вагонов) может стоять на рельсах (автобусе), зависит от многих факторов.Если загрузка автобуса превышает 60-70%, вы получите потерю данных или разбитый поезд. Кроме того, когда состояние рельсов плохое (плохая проводка, отсутствие скрученных проводов и т.