Блок кан шины: Блок кан шины. CAN-шина – как работает электроника в современных автомобилях? CAN-шина: описание и особенности прибора
что такое, зачем нужна и как работает в современном автомобиле
Появление цифровых шин в автомобилях произошло позднее, чем в них начали широко внедряться электронные блоки. В то время цифровой «выход» им был нужен только для «общения» с диагностическим оборудованием – для этого хватало низкоскоростных последовательных интерфейсов наподобие ISO 9141-2 (K-Line). Однако кажущееся усложнение бортовой электроники с переходом на CAN-архитектуру стало ее упрощением.
Действительно, зачем иметь отдельный датчик скорости, если блок АБС уже имеет информацию о скорости вращения каждого колеса? Достаточно передавать эту информацию на приборную панель и в блок управления двигателем. Для систем безопасности это ещё важнее: так, контроллер подушек безопасности уже становится способен самостоятельно заглушить мотор при столкновении, послав соответствующую команду на ЭБУ двигателя, и обесточить максимум бортовых цепей, передав команду на блок управления питанием. Раньше же приходилось для безопасности применять не надежные меры вроде инерционных выключателей и пиропатронов на клемме аккумулятора (владельцы BMW с его «глюками» уже хорошо знакомы).
Однако на старых принципах реализовать полноценное «общение» блоков управления было невозможно. На порядок выросли объем данных и их важность, то есть потребовалась шина, которая не только способна работать с высокой скоростью и защищена от помех, но и обеспечивает минимальные задержки при передаче. Для движущейся на высокой скорости машины даже миллисекунды уже могут играть критичную роль. Решение, удовлетворяющее таким запросам, уже существовало в промышленности – речь идет о CAN BUS (Controller Area Network).
Суть CAN-шины
Цифровая CAN-шина – это не конкретный физический протокол. Принцип работы CAN-шины, разработанный Bosch еще в восьмидесятых годах, позволяет реализовать ее с любым типом передачи – хоть по проводам, хоть по оптоволокну, хоть по радиоканалу. КАН-шина работает с аппаратной поддержкой приоритетов блоков и возможностью «более важному» перебивать передачу «менее важного».
Для этого введено понятие доминантного и рецессивного битов: упрощенно говоря, протокол CAN позволит любому блоку в нужный момент выйти на связь, остановив передачу данных от менее важных систем простой передачей доминантного бита во время наличия на шине рецессивного. Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Это происходит чисто физически – например, если «плюс» на проводе означает «единицу» (доминантный бит), а отсутствие сигнала – «ноль» (рецессивный бит), то передача «единицы» однозначно подавит «ноль».
Представьте себе класс в начале урока. Ученики (контроллеры низкого приоритета) спокойно переговариваются между собой. Но, стоит учителю (контроллеру высокого приоритета) громко дать команду «Тишина в классе!», перекрывая шум в классе (доминантный бит подавил рецессивный), как передача данных между контроллерами-учениками прекращается. В отличие от школьного класса, в CAN-шине это правило работает на постоянной основе.
Для чего это нужно? Чтобы важные данные были переданы с минимумом задержек даже ценой того, что маловажные данные не будут переданы на шину (это отличает CAN шину от знакомого всем по компьютерам Ethernet). В случае аварии возможность ЭБУ впрыска получить информацию об этом от контроллера SRS несоизмеримо важнее, чем приборной панели получить очередной пакет данных о скорости движения.
В современных автомобилях уже стало нормой физическое разграничение низкого и высокого приоритетов. В них используются две и даже более физические шины низкой и высокой скорости – обычно это «моторная» CAN-шина и «кузовная», потоки данных между ними не пересекаются. К всем сразу подключен только контроллер CAN-шины, который дает возможность диагностическому сканеру «общаться» со всеми блоками через один разъем.
Например, техническая документация Volkswagen определяет три типа применяемых CAN-шин:
- «Быстрая» шина, работающая на скорости 500 килобит в секунду, объединяет блоки управления двигателем, ABS, SRS и трансмиссией.
- «Медленная» функционирует на скорости 100 кбит/с и объединяет блоки системы «Комфорт» (центральный замок, стеклоподъемники и так далее).
- Третья работает на той же скорости, но передает информацию только между навигацией, встроенным телефоном и так далее. На старых машинах (например, Golf IV) информационная шина и шина «комфорт» были объединены физически.

Интересный факт: на Renault Logan второго поколения и его «соплатформенниках» также физически две шины, но вторая соединяет исключительно мультимедийную систему с CAN-контроллером, на второй одновременно присутствуют и ЭБУ двигателя, и контроллер ABS, и подушки безопасности, и ЦЭКБС.
Физически же автомобили с CAN-шиной используют ее в виде витой дифференциальной пары: в ней оба провода служат для передачи единственного сигнала, который определяется как разница напряжений на обоих проводах. Это нужно для простой и надежной помехозащиты. Неэкранированный провод работает, как антенна, то есть источник радиопомех способен навести в нем электродвижущую силу, достаточную для того, чтобы помеха воспринялась контроллерами как реально переданный бит информации.
Но в витой паре на обоих проводах значение ЭДС помехи будет одинаковым, так что разница напряжений останется неизменной. Поэтому, чтобы найти CAN-шину в автомобиле, ищите витую пару проводов – главное не перепутать ее с проводкой датчиков ABS, которые так же для защиты от помех прокладываются внутри машины витой парой.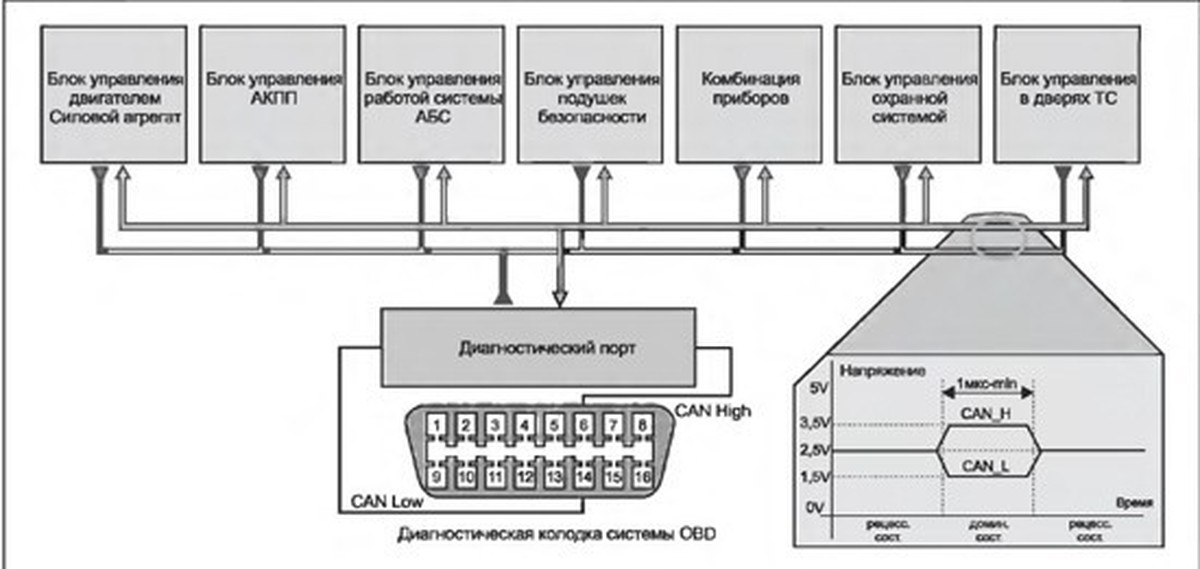
Диагностический разъем CAN-шины не стали придумывать заново: провода вывели на свободные пины уже стандартизированной в OBD-II колодки, в ней CAN-шина находится на контактах 6 (CAN-H) и 14 (CAN-L).
Поскольку CAN-шин на автомобиле может быть несколько, часто практикуется использование на каждой разных физических уровней сигналов. Вновь для примера обратимся к документации Volkswagen. Так выглядит передача данных в моторной шине:
Когда на шине не передаются данные или передается рецессивный бит, на обоих проводах витой пары вольтметр покажет по 2,5 В относительно «массы» (разница сигналов равна нулю). В момент передачи доминантного бита на проводе CAN-High напряжение поднимается до 3,5 В, в то время как на CAN-Low опускается до полутора. Разница в 2 вольта и означает «единицу».
На шине «Комфорт» все выглядит иначе:
Здесь «ноль» — это, наоборот, 5 вольт разницы, причем напряжение на проводе Low выше, чем на проводе High. «Единица» же – это изменение разности напряжений до 2,2 В.
Проверка CAN-шины на физическом уровне ведется с помощью осциллографа, позволяющего увидеть реальное прохождение сигналов по витой паре: обычным тестером, естественно, «разглядеть» чередование импульсов такой длины невозможно.
«Расшифровка» CAN-шины автомобиля также ведется специализированным прибором – анализатором. Он позволяет выводить пакеты данных с шины в том виде, как они передаются.
Сами понимаете, что диагностика шины CAN на «любительском» уровне без соответствующего оборудования и знаний не имеет смысла, да и банально невозможна. Максимум, что можно сделать «подручными» средствами, чтобы проверить кан-шину – это измерить напряжения и сопротивление на проводах, сравнив их с эталонными для конкретного автомобиля и конкретной шины. Это важно – выше мы специально привели пример того, что даже на одном автомобиле между шинами может быть серьезная разница.
Неисправности
Хотя интерфейс CAN и хорошо защищен от помех, электрические неисправности стали для него серьезной проблемой. Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
Объединение блоков в единую сеть сделало ее уязвимой. КАН-интерфейс на автомобилях стал настоящим кошмаром малоквалифицированных автоэлектриков уже по одной своей особенности: сильные скачки напряжения (например, зимний запуск на сильно разряженном аккумуляторе) способны не только «повесить» ошибку CAN-шины, обнаруживаемую при диагностике, но и заполнить память контроллеров спорадическими ошибками, случайного характера.
В результате на приборной панели загорается целая «гирлянда» индикаторов. И, пока новичок в шоке будет чесать голову: «да что же это такое?», грамотный диагност первым делом поставит нормальный аккумулятор.
Чисто электрические проблемы – это обрывы проводов шины, их замыкания на «массу» или «плюс». Принцип дифференциальной передачи при обрыве любого из проводов или «неправильном» сигнале на нем становится нереализуем. Страшнее всего замыкание провода, поскольку оно «парализует» всю шину.
Представьте себе простую моторную шину в виде провода, на котором «сидят в ряд» несколько блоков – контроллер двигателя, контроллер АБС, приборная панель и диагностический разъем.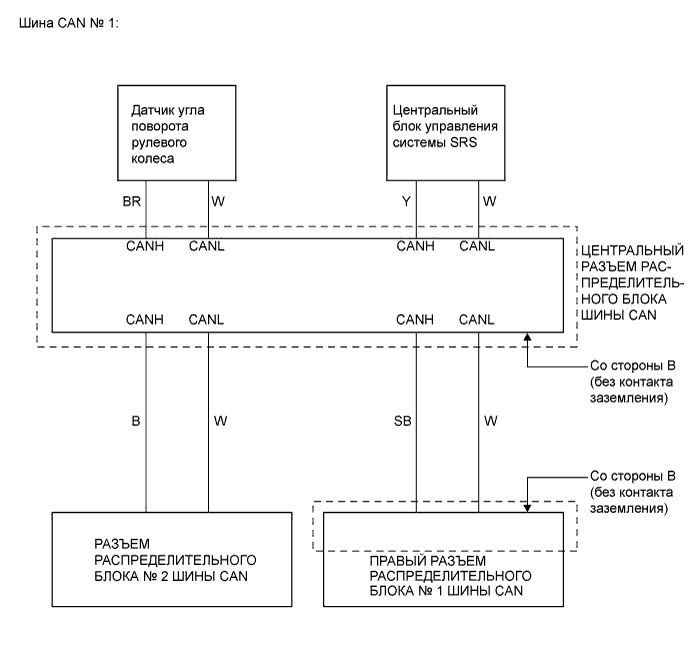 Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
Обрыв у разъема автомобилю не страшен – все блоки продолжат передавать информацию друг другу в штатном режиме, невозможной станет только диагностика. Если оборвать провод между контроллером АБС и панелью, мы сможем увидеть сканером на шине только ее, ни скорость, ни обороты двигателя она показывать не будет.
А вот при обрыве между ЭБУ двигателя и АБС машина, скорее всего, уже не заведется: блок, не «видя» нужный ему контроллер (информация о скорости учитывается при расчете времени впрыска и угла опережения зажигания), уйдет в аварийный режим.
Если не резать провода, а просто постоянно подать на один из них «плюс» или «массу», автомобиль «уйдет в нокаут», поскольку ни один из блоков не сможет передавать данные другому. Поэтому золотое правило автоэлектрика в переводе на русский цензурный звучит как «не лезь кривыми руками в шину», а ряд автопроизводителей запрещает подключать к CAN-шине несертифицированные дополнительные устройства стороннего производства (например, сигнализации).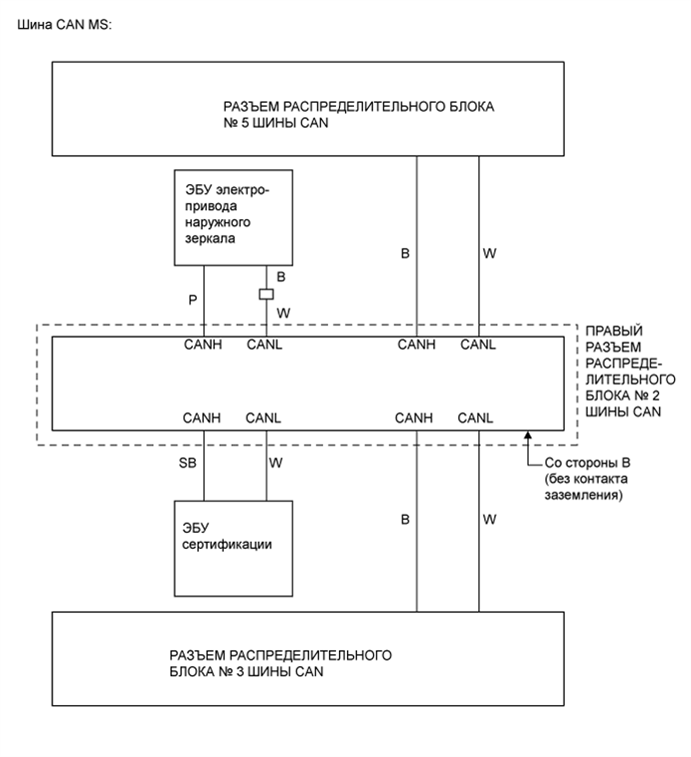
Благо подключение CAN-шины сигнализации не разъем в разъем, а врезаясь непосредственно в шину автомобиля, дают «криворукому» установщику возможность перепутать провода местами. Автомобиль после этого не то что откажется заводиться – при наличии контроллера управления бортовыми цепями, распределяющего питание, даже зажигание не факт что включится.
CAN шина автомобиля — Угона.нет
Бортовая электроника современного автомобиля в своем составе имеет большое количество исполнительных и управляющих устройств. К ним относятся всевозможные датчики, контроллеры и т.д.
Для обмена информацией между ними требовалась надежная коммуникационная сеть.
В середине 80-х годов прошлого столетия компанией BOSCH была предложена новая концепция сетевого интерфейса CAN (Controller Area Network).
CAN-шина обеспечивает подключение любых устройств, которые могут одновременно принимать и передавать цифровую информацию (дуплексная система). Собственно шины представляет собой витую пару. Данная реализация шина позволила снизить влияние внешних электромагнитных полей, возникающих при работе двигателя и других систем автомобиля. По такой шине обеспечивается достаточно высокая скорость передачи данных.
Данная реализация шина позволила снизить влияние внешних электромагнитных полей, возникающих при работе двигателя и других систем автомобиля. По такой шине обеспечивается достаточно высокая скорость передачи данных.
Как правило, провода CAN-шины оранжевого цвета, иногда они отличаются различными цветными полосами (CAN-High — черная, CAN-Low — оранжево-коричневая).
Благодаря применению данной системы из состава электрической схемы автомобиля высвободилось определенное количество проводников,которые обеспечивали связь, например, по протоколу KWP 2000 между контроллером системы управления двигателем и штатной сигнализацией, диагностическим оборудованием и т.д.
Скорость передачи данных по CAN-шине может достигать до 1 Мбит/с, при этом скорость передачи информации между блоками управления (двигатель — трансмиссия, ABS — система безопасности) составляет 500 кбит/с (быстрый канал), а скорость передачи информации системы «Комфорт» (блок управления подушками безопасности, блоками управления в дверях автомобиля и т. д.), информационно-командной системы составляет 100 кбит/с (медленный канал).
д.), информационно-командной системы составляет 100 кбит/с (медленный канал).
На рис. 1 показана топология и форма сигналов CAN-шины легкового автомобиля.
При передаче информации какого-либо из блоков управления сигналы усиливаются приемо-передатчиком (трансивером) до необходимого уровня.
Каждый подключенный к CAN-шине блок имеет определенное входное сопротивление, в результате образуется общая нагрузка шины CAN. Общее сопротивление нагрузки зависит от числа подключенных к шине электронных блоков управления и исполнительных механизмов. Так, например, сопротивление блоков управления, подключенных к CAN-шине силового агрегата, в среднем составляет 68 Ом, а системы «Комфорт» и информационно-командной системы — от 2,0 до 3,5 кОм.
Следует учесть, что при выключении питания происходит отключение нагрузочных сопротивлений модулей, подключенных к CAN-шине.
На рис. 2 показан фрагмент CAN-шин с распределением нагрузки в линиях CAN-High, CAN-Low.
Системы и блоки управления автомобиля имеют не только различные нагрузочные сопротивления, но и скорости передачи данных, все это может препятствовать обработке разнотипных сигналов.
Для решения данной технической проблемы используется преобразователь для связи между шинами.
Такой преобразователь принято называть межсетевым интерфейсом, это устройство в автомобиле чаще всего встроено в конструкцию блока управления, комбинацию приборов, а также может быть выполнено в виде отдельного блока.
Также интерфейс используется для ввода и вывода диагностической информации, запрос которой реализуется по проводу «К», подключенному к интерфейсу или к специальному диагностическому кабелю CAN-шины.
В данном случае большим плюсом в проведении диагностических работ является наличие единого унифицированного диагностического разъема (колодка OBD).
На рис. 3 показана блок-схема межсетевого интерфейса.
Следует учесть, что на некоторых марках автомобилей, например, на Volkswagen Golf V, CAN-шины системы «Комфорт» и информационно-командная система не соединены межсетевым интерфейсом.
В таблице представлены электронные блоки и элементы, относящиеся к CAN-шинам силового агрегата, системы «Комфорт» и информационно-командной системы. Приведенные в таблице элементы и блоки по своему составу могут отличаться в зависимости от марки автомобиля.
Диагностика неисправностей CAN-шины производится с помощью специализированной диагностической аппаратуры (анализаторы CAN-шины) осциллографа (в том числе, со встроенным анализатором шины CHN) и цифрового мультиметра.
Как правило работы по проверке работы CAN-шины начинают с измерения сопротивления между проводами шины. Необходимо иметь в виду, что CAN-шины системы «Комфорт» и информационно-командной системы, в отличие от шины силового агрегата, постоянно находятся под напряжением, поэтому для их проверки следует отключить одну из клемм аккумуляторной батареи.
Основные неисправности CAN-шины в основном связаны с замыканием/обрывом линий (или нагрузочных резисторов на них), снижением уровня сигналов на шине, нарушениями в логике ее работы. В последнем случае поиск дефекта может обеспечить только анализатор CAN-шины.
В последнем случае поиск дефекта может обеспечить только анализатор CAN-шины.
CAN-шины современного автомобиля
- CAN шина силового агрегата
- Электронный блок управления двигателя
- Электронный блок управления КПП
- Блок управления подушками безопасности
- Электронный блок управления АБС
- Блок управления электроусилителя руля
- Блок управления ТНВД
- Центральный монтажный блок
- Электронный замок зажигания
- Датчик угла поворота рулевого колеса
- CAN-шина системы «Комфорт»
- Комбинация приборов
- Электронные блоки дверей
- Электронный блок контроля парковочной
Системы
- Блок управления системы «Комфорт»
- Блок упрввления стеклоочистителей
- Контроль давления в шинах
CAN-шина информационно-командной системы
- Комбинация приборов
- Система звуковоспроизведения
- Информационная система
- Навигационная система
Источник : Ремонт и Сервис
Управление автомобилем по CAN / Хабр
Введение
Беспилотный автомобиль StarLine
на платформе
Lexus RX 450h
— научно-исследовательский проект, стартовавший в 2018 году. Проект открыт для амбициозных специалистов из
Проект открыт для амбициозных специалистов из
Open Source Community
. Мы предлагаем всем желающим поучаствовать в процессе разработки на уровне кода, опробовать свои алгоритмы на реальном автомобиле, оснащенном дорогостоящим оборудованием. Для управления автомобилем было решено использовать Apollo, открытый фреймворк. Для работы Apollo нам необходимо было подключить набор модулей. Эти модули помогают программе получать информацию об автомобиле и управлять им по заданным алгоритмам.
К таким модулям относятся:
- модуль позиционирования автомобиля в пространстве с помощью GPS-координат;
- модуль управления рулем, ускорением и торможением авто;
- модуль состояния систем автомобиля: скорость, ускорение, положение руля, нажатие на педали и т.д.;
- модуль получения информации об окружении автомобиля. С этим справятся ультразвуковые датчики, камеры, радары и лидары.
Прежде всего перед нашей командой стояла задача научиться управлять рулем, ускорением и торможением автомобиля.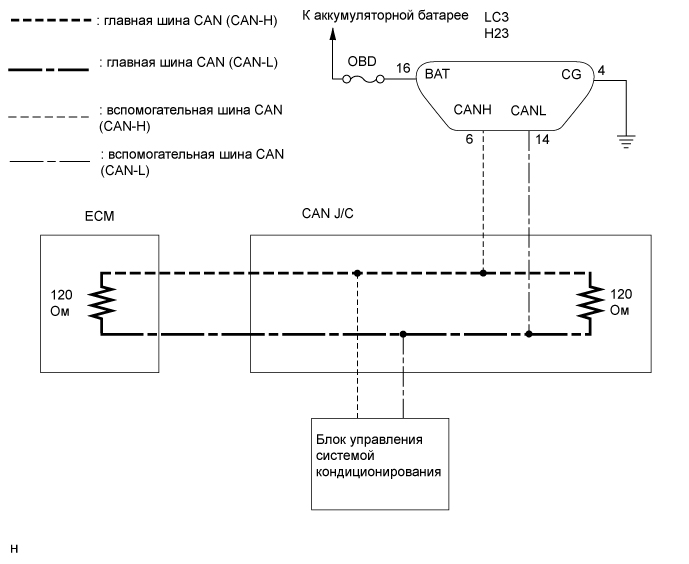 А также получать информацию о состоянии систем автомобиля. Для этого была проведена большая работу по изучению CAN-шины Lexus.
А также получать информацию о состоянии систем автомобиля. Для этого была проведена большая работу по изучению CAN-шины Lexus.
Теоретическая часть
Что такое CAN-шина
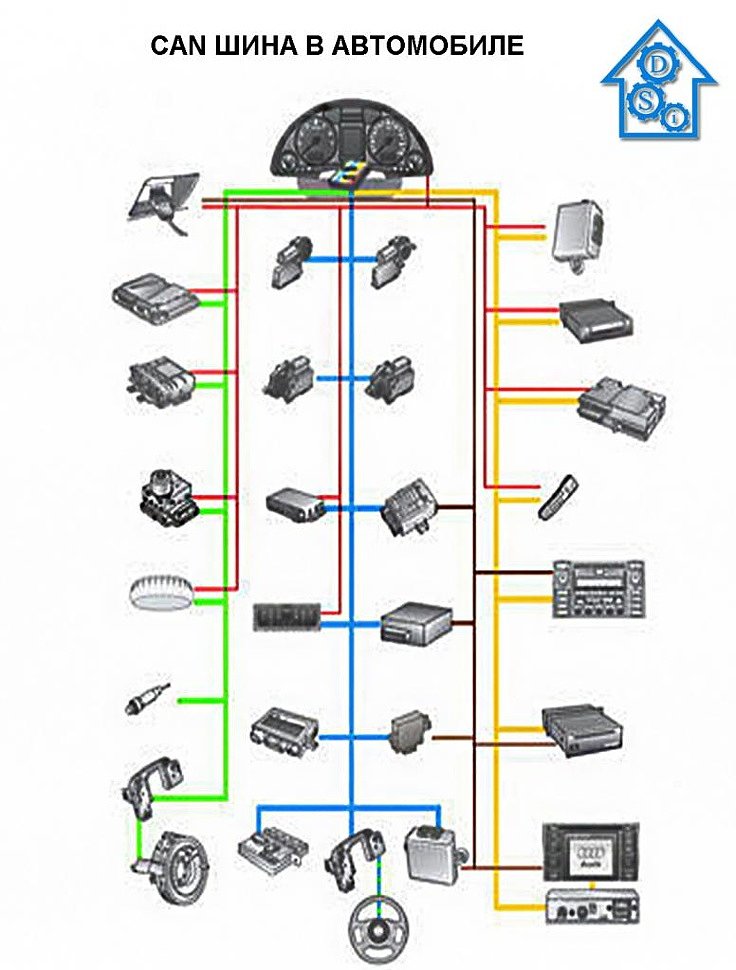
В современных автомобилях управление всеми системами взяли на себя электронные блоки (Рис. 1.). Электронные блоки — это специализированные компьютеры, каждый из которых имеет все необходимые интерфейсы для интеграции с автомобилем. С помощью цифровых интерфейсов связи, блоки объединяются в сеть для обмена информацией друг с другом. Самые распространенные цифровые интерфейсы в автомобилях — CAN, LIN, FLEXRay. Из них наибольшее распространение получил именно CAN.
CAN (Controller Area Network) шина — это промышленный стандарт сети. В 1986 году этот стандарт разработали в компании Bosch. А первым автомобилем с CAN-шиной стал Mercedes-Benz W140, выпущенный в 1991 году. Стандарт разрабатывался для возможности устройствам общаться друг с другом без хоста. Обмен информацией осуществляется с помощью специальных сообщений, которые состоят из полей ID, длины сообщения и данных.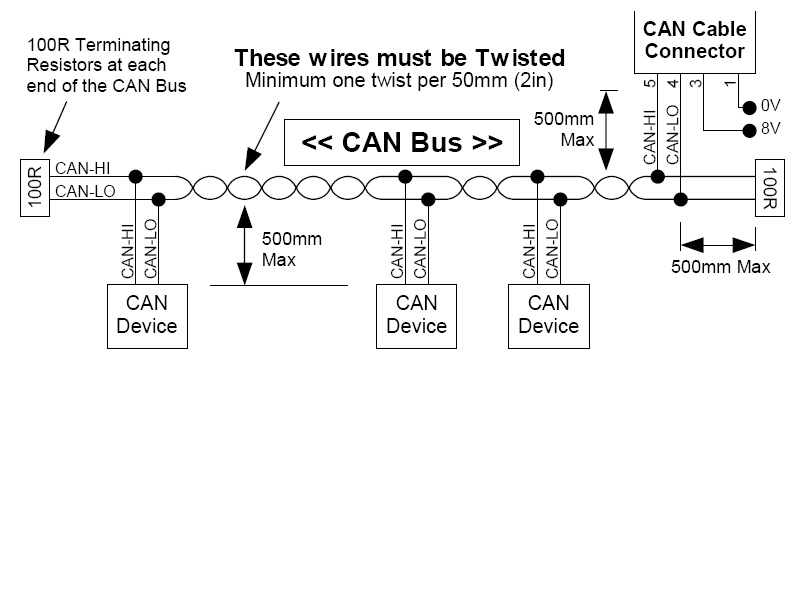 Каждый блок имеет свой набор ID. При этом приоритет на шине имеет сообщение с меньшим ID. Поле данных может нести информацию, например, о состоянии систем и датчиков, команды управления механизмами и т.д.
Каждый блок имеет свой набор ID. При этом приоритет на шине имеет сообщение с меньшим ID. Поле данных может нести информацию, например, о состоянии систем и датчиков, команды управления механизмами и т.д.
Рис. 1. Шина CAN автомобиля.
На физическом уровне шина представляет собой витую пару из медных проводников. Сигнал передается дифференциально, за счет чего достигается высокая помехоустойчивость.
Рис. 2. Физическое представление сигнала в CAN шине
Посредством CAN шины можно получать информацию о состоянии различных датчиков и системах автомобиля. Также по CAN можно управлять узлами автомобиля. Именно эти возможности мы и используем для своего проекта.
Мы выбрали Lexus RX, потому что знали, что сможем управлять всеми необходимыми узлами по CAN. Так как самое сложное при исследовании автомобиля — это закрытые протоколы. Поэтому одной из причин выбора именно этой модели авто стало наличие описания части протокола CAN-шины в opensource-проекте Openpilot.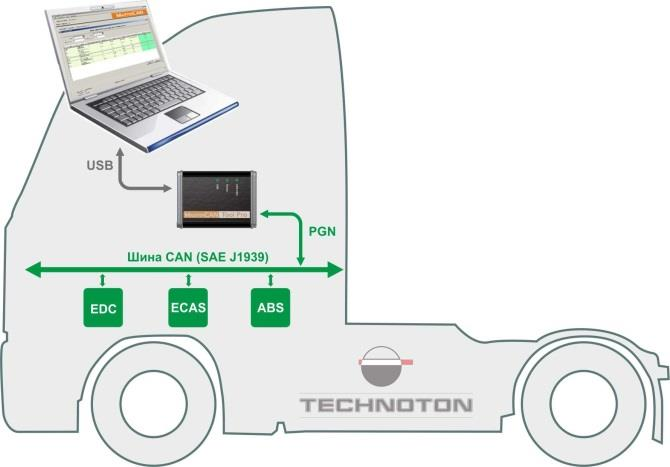
Правильно управлять автомобилем — означает понимать, как работают механические части систем автомобиля. Нам было необходимо хорошо понимать, как правильно работать с электроусилителем или управлять замедлением автомобиля. Ведь, например, при повороте колеса создают сопротивление на рулевое управление, что вносит свои ограничения на управление при повороте. Некоторые системы невозможно использовать без ввода авто в специальные рабочие режимы. Эти и другие детали нам пришлось изучать в процессе работы.
Электроусилитель руля
Электроусилитель руля EPS (Electric Power Steering) — система, предназначенная снизить усилие на руль при повороте (Рис. 3). Приставка «электро» говорит о типе системы — электрическая. Управление рулем с этой системой становится комфортным, водитель поворачивает руль в нужном направлении, а электродвигатель помогает довернуть его до необходимого угла.
Электроусилитель устанавливается на рулевой вал автомобиля, части которого соединены между собой торсионным валом. На торсионный вал устанавливается датчик величины крутящего момента (Torque Sensor). При вращении руля происходит скручивание торсионного вала, которое регистрируется датчиком момента. Данные, полученные от датчика момента, датчиков скорости и оборотов коленвала, поступают в электронный блок управления ECU. А ECU, в свою очередь, уже вычисляет необходимое компенсационное усилие и подает команду на электродвигатель усилителя.
На торсионный вал устанавливается датчик величины крутящего момента (Torque Sensor). При вращении руля происходит скручивание торсионного вала, которое регистрируется датчиком момента. Данные, полученные от датчика момента, датчиков скорости и оборотов коленвала, поступают в электронный блок управления ECU. А ECU, в свою очередь, уже вычисляет необходимое компенсационное усилие и подает команду на электродвигатель усилителя.
Рис. 3. Схематичное изображение системы электроусилителя руля
Видео: cистема LKA рулит автомобилем с помощью системы EPS.
Электронная педаль газа
Дроссельная заслонка — это механизм регулировки количества топливной смеси, которая попадет в двигатель. Чем больше смеси попадет, тем быстрее едет автомобиль.
Электронная педаль газа — это система, которая задействует работу нескольких электронных узлов. Сигнал о положении педали, при ее нажатии, поступает в блок управления двигателем ECM (Engine Control Module). ECM, на основе этого сигнала, рассчитывает необходимое количество топлива, которое нужно подать в двигатель. В зависимости от необходимого количества топлива, ECM регулирует угол открытия дроссельной заслонки.
В зависимости от необходимого количества топлива, ECM регулирует угол открытия дроссельной заслонки.
Рис. 4. Система электронной педали газа.
Видео: Для работы круиз-контроля используется управление электронной педалью газа.
Электронные системы помощи водителю
Мы купили автомобиль, который оборудован множеством цифровых блоков и систем помощи водителю (ADAS). В нашем проекте мы используем LKA, ACC и PCS.
LKA (Lane Keep Assist) — это система удержания в полосе, которая состоит из фронтальной камеры и вычислительного блока. LKA удерживает автомобиль в полосе движения, когда водитель, например, отвлекся. Алгоритмы в вычислительном блоке получают данные от камеры и на их основе принимают решение о состоянии автомобиля на дороге. Система способна понимать, что автомобиль неконтролируемо движется к правой или левой полосе. В таких случаях подается звуковой сигнал для привлечения внимания водителя. При пересечении полосы система сама скорректирует угол поворота колес так, чтобы автомобиль остался в полосе движения. Система должна вмешиваться только в том случае, если осознает, что маневр между полосами движения не был вызван действием водителя.
Система должна вмешиваться только в том случае, если осознает, что маневр между полосами движения не был вызван действием водителя.
ACC (Adaptive Cruise Control) — система адаптивного круиз-контроля, который позволяет выставить заданную скорость следования. Автомобиль сам ускоряется и притормаживает для поддержания нужной скорости, при этом водитель может убрать ногу с педалей газа и тормоза. Этот режим удобно использовать при езде по скоростным магистралям и автострадам. Адаптивный круиз контроль способен видеть препятствия впереди автомобиля и притормаживать для избежания столкновения с ними. Если впереди автомобиля едет другое транспортное средство с меньшей скоростью, ACC сбавит скорость и будет следовать за ним. При обнаружении статичного объекта, ACC сбавит скорость до полной остановки. Для обнаружения объектов перед автомобилем такая система использует радар с миллиметровым диапазоном длин волн. Обычно такие радары работают на частоте 24-72 ГГц и способны уверенно видеть объекты на расстоянии до 300 метров. Радар обычно установлен за передним значком на решетке радиатора.
Радар обычно установлен за передним значком на решетке радиатора.
PCS (Pre-Collision System) — система предотвращения столкновения. Система призвана предотвратить столкновение с автомобилем, который движется впереди. При неизбежности столкновения, система минимизирует урон от столкновения. Здесь так же используются радар для оценки расстояния до объекта и фронтальная камера для его распознавания. Фронт PCS прогнозирует вероятность столкновения на основе скорости автомобиля, расстояния до объекта и его скорости. Обычно у системы есть два этапа срабатывания. Первый этап — система звуком и индикацией на приборной панели оповещает об опасности водителя. Второй этап — активируется экстренное торможение с помощью системы ABS, и включаются преднатяжители ремней безопасности.
Практическая часть
Управление рулем
Первое, что захотелось сделать нашей команде, — это научиться рулить. Рулем в автомобиле могут управлять две системы: парковочный ассистент IPAS (Intelligent Park Assist) и LKA.
IPAS позволяет задавать напрямую угол поворота рулевого колеса в градусах. Так как в нашем автомобиле нет данной системы, проверить и освоить рулевое управление таким способом нельзя.
Поэтому мы изучили электрические схемы автомобиля и поняли, какие CAN-шины могут быть полезны. Мы подключили анализатор CAN-шины. Лог содержит файл записей сообщений в шине в хронологической последовательности. Наша задача была найти команды управления электроусилителем руля EPS (Electric Power Steering). Мы сняли лог поворота рулевого колеса из стороны в сторону, в логе смогли найти показания угла поворота и скорость вращения рулевого колеса. Ниже пример изменения данных в шине CAN. Интересующие нас данные выделены маркером.
Поворот руля влево на 360 градусов
Поворот руля вправо на 270 градусов
Следующим этапом мы исследовали систему удержания в полосе. Для этого мы выехали на тихую улицу и записали логи обмена между блоком удержания в полосе и DSU (Driving Support ECU). С помощью анализатора шины CAN нам удалось вычислить сообщения от системы LKA. На рисунке 6 изображена команда управления EPS.
С помощью анализатора шины CAN нам удалось вычислить сообщения от системы LKA. На рисунке 6 изображена команда управления EPS.
Рис. 5. Команда управления рулем с помощью системы LKA
LKA управляет рулем путем задания значения момента на валу (STEER_TORQUE_CMD) рулевого колеса. Команду принимает модуль EPS. Каждое сообщение содержит в заголовке значение счетчика (COUNTER), которое инкрементируется при каждой отправке. Поле LKA_STATE содержит информацию о состоянии LKA. Для захвата управления необходимо выставлять бит STEER_REQUEST.
Сообщения, которые отвечают за работу важных систем авто, защищаются контрольной суммой (CHECKSUM) для минимизации рисков ложного срабатывания. Автомобиль проигнорирует такую команду, если сообщение содержит некорректную контрольную сумму или значение счетчика. Это встроенная производителем защита от вмешательств сторонних систем и помех в линии связи.
На графике (Рис. 6.) представлена диаграмма работы LKA. Torque Sensor — значение с датчика момента на торсионном валу. Torque Cmd — команда от LKA для управления рулем. Из картинки видно, как происходит подруливание LKA для удержания автомобиля в полосе. При переходе через ноль меняется направление поворота руля. Т.е. отрицательное значение сигнала говорит о повороте вправо, положительное — влево. Удержание команды в нуле говорит об отсутствии управления со стороны LKA. При вмешательстве водителя, система перестает выдавать управление. О вмешательстве водителя LKA узнает с помощью второго датчика момента на валу со стороны рулевого колеса.
Рис. 6. График работы системы LKA
Нам предстояло проверить работу команды управления рулем. С помощью модуля StarLine Сигма 10 мы подготовили прошивку для проверки управления. StarLine Сигма 10 должен выдавать в CAN-шину команды на поворот руля влево или вправо. На тот момент у нас не было графического интерфейса для управления модулем, поэтому пришлось использовать штатные средства автомобиля. Мы нашли в CAN-шине статус положения рычага круиз-контроля и запрограммировали модуль таким образом, что верхнее положение рычага приводило к повороту руля вправо, нижнее положение — к повороту влево (Рис. 7).
Рис. 7. Первые попытки рулить
На видео видно, что управление осуществляется короткими секциями. Это возникает по нескольким причинам.
Первая из причин — это отсутствие обратной связи. Если расхождение между сигналом Torque Cmd и Torque Sensor превышает определенное значение Δ, система автоматически перестает воспринимать команды (Рис. 8). Мы настроили алгоритм на корректировку выдаваемой команды (Torque CMD) в зависимости от значения момента на валу (Torque Sensor).
Рис. 8. Расхождение сигнала приводит к ошибке работы системы
Следующее ограничение связано с системой защиты встроенной в EPS. Система EPS не позволяет командами от LKA рулить в широком диапазоне. Что вполне логично, т.к. при езде по дороге резкое маневрирование не безопасно. Таким образом, при превышении порогового значения момента на валу, система LKA выдает ошибку и отключается (Рис. 9).
Рис. 9. Превышение порогового значения регулировки момента на валу
Независимо от того, активирована система LKA или нет, сообщения с командами от нее присутствуют в шине постоянно. Мы посылаем модулю EPS команду повернуть колеса с конкретным усилием влево или вправо. А в это время LKA перебивает наши посылки «пустыми» сообщениями. После нашей команды со значением момента, приходит штатная с нулевым (Рис. 10).
Рис. 10. Штатные сообщения приходят с нулевыми значениями момента и перебивают наше управление
Тогда мы, с помощью модуля StarLine Сигма 10, смогли фильтровать весь трафик от LKA и блокировать сообщения с ID 2E4, когда нам это было нужно. Это решило проблему, а нам удалось получить плавное управления рулем (Рис. 11).
Рис. 11. Плавная регулировка поворота руля без ошибок
Управление газом
Система адаптивного круиз-контроля ACC управляет ускорением и торможением программно по CAN-шине. Блок управления двигателем ECU принимает команды DSU, если необходимо ускориться — активирует электронную педаль газа. Для торможения автомобиля используется рекуперативное торможение. При этом на торможение и ускорение используется одна команда, отличаются только значения.2, ACCEL_CMD = 1000 (0x03E8).
Рис. 12. Команда управления ускорения/замедления автомобиля
Мы сняли логи со штатной системы ACC и проанализировали команды. Сравнили с имеющимся у нас описанием команд и приступили к тестированию.
Рис. 13. Лог управления ускорением/замедлением системы адаптивного круиз-контроля ACC (выделено маркером)
Здесь не обошлось без трудностей. Мы выехали на дорогу с оживленным трафиком для тестирования команды ускорения. Команды управления ускорением или замедлением автомобиля работают только при активированном круиз контроле, не достаточно активировать его кнопкой. Необходимо найти движущийся впереди автомобиль и включить режим следования за ним.
Рис. 14. Активация круиз контроля происходит при наличии впереди другого траснпортного средства
С помощью модуля StarLine Сигма 10 посылаем команду ускорения, и автомобиль начинает набирать скорость. К этому моменту мы подключили графический интерфейс для управления модулем StarLine Сигма 10. Теперь мы управляем рулем, ускорением и торможением с помощью кнопок в приложении.
Команды работали до тех пор, пока не потеряли автомобиль впереди. Система круиз-контроля отключилась, а следовательно, и команды ускорения перестали работать.
Мы приступили к исследованию возможности использовать команды без активного круиз-контроля. Пришлось много времени потратить на анализ данных в шине CAN, чтобы понять как создать условия для работы команд. Нас интересовало, в первую очередь, какой блок блокирует выполнение команд ACC на ускорение или замедление. Пришлось изучить какие ID идут от DSU, LKA, радара и камеры, подсовывая липовые данные различных датчиков.
Решение пришло спустя 3 недели. К тому времени мы представляли как происходит взаимодействие блоков автомобиля, провели исследование трафика сообщений и выделили группы сообщений, посылаемых каждым блоком. За работу адаптивного круиз-контроля ACC отвечает блок Driving Support ECU (DSU). DSU выдает команды на ускорение и замедление автомобиля, и именно этот блок получает данные от радара миллиметрового диапазона. Радар сообщает DSU на каком расстоянии от машины движется объект, с какой относительной скоростью и определяет его положение по горизонтали (левее, правее или по центру).
Наша идея заключалась в подмене данных радара. Мы сняли лог следования за автомобилем, вытащили из него данные радара в момент следования. Теперь, после включения круиз-контроля, мы посылаем фейковые данные о наличии впереди идущего авто. Получается обманывать наш автомобиль, говоря что впереди движется другое авто на конкретном расстоянии.
a) б)
Рис. 15. Активация круиза: a) попытка активировать без подмены данных радара; б) активация при подмене данных от радара.
Когда запускаем нашу обманку, на приборной панели загорается значок наличия впереди идущего автомобиля. Теперь мы можем тестировать наше управление. Запускаем команду на ускорение, и автомобиль начинает быстро ускоряться.
Как мы уже узнали, команда на ускорение и замедление одна. Поэтому тут же проверили и замедление. Поехали на на скорости с активным круиз-контролем, запустили команду на торможение, и авто сразу же замедлилось.
В итоге сейчас получается разгонять и замедлять автомобиль именно так, как нам было нужно.
Цель достигнута.
Что еще мы используем
Для создания беспилотника необходимо управление вспомогательными системами: поворотниками, стоп-сигналами, аварийной сигнализацией, клаксоном и пр. Всем этим так же можно управлять по CAN шине.
Оборудование и ПО
Для работ с автомобилем сегодня мы используем набор различного оборудования:
- Анализатор шины Marathon позволяет подключать и читать данные с двух шин одновременно. На сайте производителя анализатора есть бесплатное ПО для анализа логов. Но мы используем ПО, написанное в нашей компании для внутреннего пользования.
- Модуль StarLine Сигма 10 мы используем как платформу для работы с цифровыми интерфейсами. Модуль поддерживает CAN и LIN интерфейсы. При исследовании автомобиля пишем программы на C, зашиваем их в модуль и проверяем работу. Из модуля можем сделать сниффер трафика CAN-шины. Сниффер нам помогает понять, какие ID идут от блока или блокировать сообщения от штатных систем.
- Диагностическое оборудование Toyota/Lexus. С помощью этого оборудования можно найти команды управления системами автомобиля: поворотниками, стоп-сигналами, клаксоном, индикацией приборки.
Сегодня ведется активная работа по разработке беспилотного автомобиля, в ближайших планах реализация экстренного торможения перед препятствиями, их объезда и перестраивание маршрута автомобиля в зависимости от дорожной ситуации и указаний водителя.
Беспилотный автомобиль StarLine — это открытая площадка для объединения лучших инженерных умов России и мира с целью создания прогрессивных технологий беспилотного вождения, которые сделают наше будущее безопасным и комфортным.
GitLab проекта
кан-шина, кан-шина подключение
просмотров 3 984
Google+
Кан-шина, что это такое?
Для завоевания рынка сбыта производители автомобилей улучшают комфортабельность и безопасность своих автомобилей, добавляя в их конструкцию всё больше и больше дополнительного электрооборудования. При этом неуклонно растёт число соединительных проводов, усложняя монтаж и обслуживание электрической проводки. Компания Bosch предложила решение этой проблемы, применив для управления всего один провод по которому от органов управления к исполнительным приборам передаётся сигнал. Для этой цели был разработан специальный интерфейс Controller Area Network (CAN) (КАН-ШИНА). Недостатком такой системы стало наличие электромагнитных помех от системы зажигания и других систем. Решение было, найдено применив вместо одного провода двух скрученных между собой проводов, так называемая витая пара.
Работа кан-шины
Рассмотрим подробнее работу CAN-шины на автомобиле. Как было описано ранее она представляет из себя витую пару, перекрученных между собой двух проводов. На автомобиле эта шина последовательная, то есть данные по ней передаются поочерёдно по одному или другому проводу. Питание электроприборов при этом осуществляется другим более толстым проводом.
Может возникнуть вопрос, для чего КАН-шина на автомобиле выполнена в виде двух проводов, если данные передаются только по одному. И почему применяется последовательный интерфейс с более низкой скоростью, чем параллельный. Для экономии материала логичнее было бы сделать одним проводом, тем более такие системы применяются в промышленности. Всё дело в электрических, электромагнитных и других помехах, которые есть на автомобиле. Эти помехи создают посторонний сигнал в шине и при применении однопроводного исполнения этот сигнал способен привести к сбою в оборудовании. Если шина выполнена в виде двух перекрученных между собой проводов, так называемая витая пара, то посторонний сигнал будет генерироваться в обоих проводах, но так как они перекручены. Приемник, получает сигнал по сигнальному проводу и убирает повторяющиеся импульсы поступающие по второму проводу.
Ещё одна особенность CAN-шины это передача данных в обе стороны, как от управляющего к исполнительному элементу, так и на оборот. То есть если от выключателя лампы на фонарь приходит сигнал на включение, то от фонаря на выключатель посылается сигнал, горит лампа или нет. Так же при передаче данных их по шине их получают всё оборудование, подключенное к ней, а не конкретное к которому адресованы эти данные.
Где применяется CAN-шина?
В иностранных автомобилях она применяется в управлении двигателем, климат контроле, сигнализации, сигнальных лампах и так далее. В отечественном автомобилестроении КАН-шина получила распространение только последнее время на ВАЗ-2170 Приора. Она соединяет блок водительской двери, блок сигнализации и блок управления электропакетом. Скорость передачи данных по такой шине может быть 250 кБит/сек, но фактически обмен данными происходит со скоростью 100 кБит/сек. Этой скорости достаточно для передачи данных в системе комфорт. Для передачи данных в системе управления двигателем скорость передачи 500 кБит/сек.
Что надо знать при поиске неисправностей систем, где применяется CAN-шина.
Основные неисправности шины можно разделить на два типа: механические и сбои связанные с электронной частью. Если неисправность связана с электроникой, то её можно найти только при наличие соответствующего оборудования или осциллографа. К механическим неисправностям можно отнести обрыв одного или обоих проводов, а так же нагрузочного сопротивления, замыкание на массу или между собой проводов шины. При проверке необходимо проверить сопротивление между проводами витой пары. Дело в том, что все оборудование имеет своё нагрузочного сопротивление, кроме того провода шины между собой так же соединяются нагрузочным сопротивлением. При этом надо учитывать, что шины системы комфорт находятся постоянно под напряжением, и при проверке необходимо снять клемму с аккумулятора. Сопротивление CAN-шины системы управления двигателем составляет примерно 50 – 70 Ом., а шина системы комфорт, информационно-командной систем может сильно отличаться в зависимости от подключённого оборудования и составлять примерно 2 – 4 кОм.
admin
16/02/2016
«Если Вы заметили ошибку в тексте, пожалуйста выделите это место мышкой и нажмите CTRL+ENTER»
«Если статья была Вам полезна, поделитесь ссылкой на неё в соцсетях»
Что такое CAN шина автомобиля. Список поддерживаемых автомобилей
Что такое CAN шина.
История появления CAN началась в середине 80-х годов прошлого века. Компания bosсh совместно с компанией intel разработали новый цифровой интерфейс для передачи данных — Controller Area Network (CAN).
Аналоговое подключение сигнализации (без CAN шины)
Зачем нужна CAN шина в автомобиле.
CAN шина позволяет соединить между собой любое количество датчиков, контроллеров, исполнительных элементов и прочих блоков, находящихся в автомобиле (например: системы ABS,SRS AIRBAG, ESP, иммобилайзер, блок управления двигателем, климат, КПП, центральный замок, свет, подвеска, приборная панель и т.д… ) в дуплексном режиме (приём и передача данных) со скоростью до 1 Мбит/с. При этом сама can шина состоит всего из двух проводов (витая пара). Ранее для соединения блоков необходимо было использовать сотни проводов т.к. передача единицы информации от блока к блоку осуществлялась по отдельному проводу.
Установка сигнализации по CAN шине
Автосигнализации c CAN модулем.
CAN модуль
Современные автосигнализации производятся с интегрированным CAN модулем, что позволяет подключать автомобильную сигнализацию непосредственно к цифровой шине автомобиля CAN. Автосигнализация получает в цифровом виде информацию о состоянии концевиков, замков, зажигания, ручника, тахометра и т.д. а также может управлять замками дверей, стеклоподъемниками, люком, штатной сигнализацией и некоторыми другими системами автомобиля. Установка автосигнализации с can модулем позволяет значительно сократить вмешательство в штатную электропроводку (подключения производятся всего к 6-8 проводам, вместо 15-20 в варианте без использования can шины) и позволяет избежать проблем с гарантией на электрооборудование автомобиля.
Список поддерживаемых автомобилей (в частности системами StarLine).
Выбирайте подходящую сигнализацию:
С АВТОЗАПУСКОМ | БЕЗ АВТОЗАПУСКА
Любую более подробную информацию Вы можете получить у специалистов Доп-Центра, позвонив по телефону: (495) 363-40-07
Подключение CAN шины — ООО «М2М-Телематика Сибирь»
Общая информация
|
|
|
Современные терминалы GPS/ГЛОНАСС мониторинга позволяют подключаться к CAN шине и тем самым появляется возможность читать данные о состоянии различных датчиков ТС.
Подключение абонентского терминала CAN-шине возможно двумя способами — контактным (менее безопасный, т.к. происходит врезка в провода) и бесконтактным (не снимает ТС с гарантии, 100% безопасный способ) с помощью специальных считывателей.
Для подключения к CAN наши технические специалисты используют утвержденные схемы подключения от производителей ТС.
Ниже приведен примере параметров снятых с MAN TGS 2012 года. Для снятия данных использовался терминал GALILEO SKY 5.0
1. Общий расход топлива
Абсолютный расход топлива в CAN шине показывает общее количество израсходованного топлива за все время эксплуатации автомобиля. С каждой новой поездкой этот параметр увеличивается и постоянно накапливается. При подключении к CAN шине это основной параметр, отвечающий за контроль топлива. Штатный датчик расхода очень точно определяет количество израсходованного топлива. Водитель никак не может повлиять на его работу.
2. Топлива по CAN—
Штатный датчик уровня топлива, установленный на автомобиль производителем, не всегда корректно работает. От датчика уровня топлива не требуется большой точности, так как он не влияет на работу двигателя. Этот датчик показывает водителю, когда ему пора заправлять топливо. Использовать этот датчик для точного контроля расхода топлива не всегда получается. Но его показания могут понадобиться, чтобы определить места и время заправок.
Погрешность показаний штатного датчика топлива относительно заправки по АЗС может быть от 5% до 20%.
3. Пробег по CAN
Это пробег с момента первой поездки, он постоянно накапливается с каждой поездкой. Пробег или одометр видит водитель на панели приборов. Данные по пробегу так же доступны для анализа. Можно наглядно оценить, как сильно пробег по одометру отличается от пробега по данным GPS/ГЛОНАСС. И если скручивается пробег, такие факты легко определить по показаниям этого датчика.
4. Температура двигателя
Температуры охлаждающей жидкости — Датчик температуры охлаждающей жидкости предназначен для измерения температуры охлаждающей жидкости в системе охлаждения двигателя. Датчик включен в систему управления двигателем.
5. Обороты двигателя
Параметр позволяющий в системе WIALON контролировать обороты двигателя.
Например на MANе с которого сняты данные параметры, водитель не должен превышать обороты более 2300 оборотов в минуты, т.к. при повышенных оборотах сильно изнашивается двигатель, стоимость ремонта которого очень высокая.
Так же возможно получение более специфических параметров, например, полное время работы двигателя, нагрузка на двигатель, нагрузка на ось, уровень жидкости AdBLUE, открыты ли двери водителя или пассажира, пристегнут ли ремень водители или пассажира, включены ли фары.
Подключение к CAN шине позволяет, не вмешиваясь в работу узлов и систем, получить множество параметров для контроля топлива и режимов работы автомобиля. Минимальная возможность вмешательства со стороны водителя это важная особенность такого способа.
Технические особенности обмена данными: топология шины CAN
Шина передачи данных создана для решения дилеммы по устранению излишнего количества проводов при большом количестве различных датчиков.
В мире ремонта существует термин, который описывает архитектуру, схему и порядок работы интерфейса передачи данных – это топология шины.
В современных автомобилях встречается сразу несколько шин и сетей, все блоки управления должны соответствовать требованиям топологии сети, разработанной инженерами. Двухпроводные шины выполнены по параллельной схеме подключения.
Блок управления, подключенный к последовательной шине передачи данных, называется «узлом». Сканер, подключенный к системе автомобиля, также приобретает статус узлового блока. И даже ряд датчиков и переключателей становятся узловыми.
Класс 2 Архитектура «Кольцо»
Каждый модуль подключен к двухпроводной линии передачи данных
Первые шины передачи данных были подключены к 6 и 14-контактному диагностическому разъему (DLC). Шина CAN соединяет последовательно несколько блоков управления, в том числе модуль управления двигателем (PCM), блок управления функциями салона (BCM) и блок управления топливным насосом. На выходе шины CAN предусмотрен «узел» для подключения блока управления полным приводом 4WD и оконечный резистор сопротивлением 120Ом.
Работа с электрическими схемами
Чтобы двигаться в ногу со временем, механику необходимо уметь разбираться в электросхемах, содержащих шины CAN. Пунктирная линия, опоясывающая компонент, узел или модуль указывает на их подключение к шине CAN.
Класс 2 Архитектура «Звезда»
Рис. 1: здесь представлена шина класса 2 J1850 VPW типичного автомобиля. Все блоки подключены к одной точке по схеме «звезда». Здесь не используется точка сращивания, вместо нее применяется коротко замыкающая перемычка. На этой схеме все линии шины подсоединены к перемычкам, которые имеют место сращивания, или, иными словами, контактным перемычкам шины. Но в подобных системах с двумя перемычками подключено множество блоков и может так случиться, что один из них находится в пассажирской части салона, а другой – в водительской зоне. Зачастую, удаление перемычки позволяет «узлам» работать независимо друг от друга. Следующие испытания позволяют определить место возникновения неисправности: «узловая точка» или проводка.
На некоторых схемах изображены блоки с двумя стрелками, направленными в противоположные стороны (это дополнительная информация о шине).
Все двухпроводные шины CAN оснащены терминаторами (оконечными резисторами) для поддержания постоянного напряжения в сети.
Архитектура шины
Наиболее известны на практике три топологии шины (схемы соединения узлов сети): звезда, кольцо и смешанный тип соединения. В архитектуре шины «Кольцо» все узловые точки или модули подключены параллельно.
Каждый узел имеет два провода для подключения к шине. Это мультиплексная система, в которой информация передается узловым точкам по одним и тем же проводам. Здесь все узловые точки могут включить предупреждающий индикатор «Проверить двигатель» на щитке приборов в результате обработки информации, переданной через сеть CAN.
Каждый блок способен обмениваться данными с другими блоками. Например, блок кондиционирования и отопления салона (HVAC) через блок управления функциями салона (BCM) направляет запроса в блок управления двигателем (PCM) на включение муфты компрессора кондиционера с помощью силового реле.
Если между блоками BCM и PCM возник обрыв цепи, блок PCM все равно держит связь с блоком BCM, но опосредованно, через другие модули. То есть обмен данными в этом случае не прерывается.
И только при наличии двух обрывов между блоками BCM и PCM, например, в том числе между блоком IPC и блоком радиосистемы (Radio), модуль PCM переходит в автономный режим работы и не обменивается информацией с модулями BCM или антиблокировочной тормозной системы (ABS).
Короткое замыкание в кольцевой шине
Класс 2 Архитектура смешанного типа соединения (звезда/кольцо)
Рис. 2: здесь окружностью красного цвета обведены точки сращивания или соединения звездой модулей ABS, противоугонной системы (Theft Control) и панели приборов. Кроме того, модуль ABS (обведен окружностью синего цвета) имеет двухпроводное подключение к шине и соединен с панелью приборов и диагностическим разъемом DLC по кольцевой схеме.
Основная проблема при диагностике кольцевой шины заключается в устранении коротких замыканий. Диагностика обрывов в данной архитектуре не представляет особых сложностей, поскольку подобные «узловые точки» просто изолированы от системы, которая продолжает работать. Но при возникновении короткого замыкания выходит из строя вся система в целом.
Если в шине возникло замыкание, довольно сложно вычислить «проблемный» модуль или участок проводки. Если замыкание возникло в одном из модулей, необходимо отключать их от сети и одновременно наблюдать за ее восстановлением (после отключения неисправного модуля сеть снова начнет работать). Но это не самый лучший способ ремонта, поскольку уходит много времени на поиск неисправности.
Короткие замыкания – это уязвимое место данной архитектуры шины, в которой применяется большее количество проводов.
Архитектура «Звезда»
В этой архитектуре применяется гребешковый, стыковой соединитель или короткозамыкающая перемычка. Они вставляются во втулочную часть разъема.
Все модули имеют только один провод, которым они подключаются к последовательной шине передачи данных в одном общем соединителе (точке) по параллельной схеме подключения.
См. рис. 1, приведенный выше.
Своим названием данная архитектура обязана компьютерной индустрии. Например, сеть Ethernet представляет собой звезду, соединяющую ПК, принтеры, серверы с хабом Ethernet.
Точки соединения звезды зачастую расположены рядом с диагностическим разъемом DLC, но бывают исключения. Некоторые автопроизводители выполняют точку соединения в виде спайки, другие – делают ее разъемной. В ряде автомобилей соединение можно разомкнуть и подключить к нему тестер для проверки наличия замыканий на «плюс» или «массу».
Понимая топологию шины (кольцо, звезда, смешанный вариант), можно диагностировать короткие замыкания, ошибки связи и замыкания на массу быстрее, чем с использованием блок-схем.
Знание симптомов коротких замыканий (на плюс и массу) и обрывов в системах разных архитектур позволяет выбрать наиболее эффективный план действий по поиску и устранению неисправности.
Смешанный тип архитектуры (звезда/кольцо)
Автопроизводители могут применять разные топологии шин в одной системе. В результате этого образуется смешанный тип соединения. Обе системы оснащены множеством узловых точек, которые соединены в кольцо и звезду.
См. рис 2, приведенный выше.
Если Вам известен тип архитектуры и тип неисправности (замыкание на массу или плюс), далее необходимо разъединить точки сращивания и проверить состояние узловых точек.
Если короткое замыкание пропало, необходимо поочередно отключать блоки управления до тех пор, пока замыкание не возникнет вновь.
Если после разъединения точек сращивания замыкание не исчезает, оно, по всей видимости, находится в узлах, подключенных к кольцевой шине. В этом случае, блоки ABS и панели приборов могут быть причиной замыкания на «массу» или «плюс» и подключены к месту сращивания (перемычке).
Для устранения неисправности необходимо поочередно отсоединить и проверить модули.
Прогнозирование задержки шины с помощью машинного обучения
Чтобы разработать нашу модель, мы извлекли обучающие данные из последовательностей местоположений автобусов с течением времени, полученных из потоковых данных транспортных агентств в реальном времени, и выровняли их со скоростью движения автомобилей на пути автобуса во время поездки. Модель разбита на последовательность единиц временной шкалы — посещения кварталов и остановок, каждая из которых соответствует отрезку временной шкалы автобуса, причем каждая единица прогнозирует продолжительность. Пара соседних наблюдений обычно охватывает множество единиц из-за нечастых отчетов, быстро движущихся автобусов и коротких кварталов и остановок.
Эта структура хорошо подходит для моделей нейронных последовательностей, подобных тем, которые недавно успешно применялись для обработки речи, машинного перевода и т. Д. Наша модель проще. Каждая единица прогнозирует свою продолжительность независимо, а окончательный результат — это сумма прогнозов для каждой единицы. В отличие от многих моделей последовательностей, нашей модели не нужно учиться комбинировать выходные данные модулей или передавать состояние через последовательность модулей. Вместо этого структура последовательности позволяет нам совместно (1) обучать модели длительности отдельных единиц и (2) оптимизировать «линейную систему», где каждая наблюдаемая траектория назначает общую продолжительность сумме множества единиц, которые она охватывает.
| Чтобы смоделировать поездку на автобусе (а), начинающуюся на синей остановке, модель (b) суммирует прогнозы задержки из единиц временной шкалы для синей остановки, трех сегментов дороги, белой остановки и т. д. |
Моделирование «Где»
Помимо задержек из-за дорожного движения, при обучении нашей модели мы также учитываем детали маршрута автобуса, а также сигналы о месте и времени поездки. Даже в небольшом районе модель должна по-разному переводить прогноз скорости автомобиля в скорость автобуса на разных улицах.На левой панели ниже мы выделяем цветом прогнозируемое соотношение скорости автомобиля и скорости автобуса для нашей модели для поездки на автобусе. Более красные и медленные участки могут соответствовать замедлению автобуса возле остановок. Что касается быстрого зеленого участка в выделенном поле, мы узнаем, глядя на него в StreetView (справа), что наша модель обнаружила полосу поворота только для автобусов. Кстати, этот маршрут проходит в Австралии, где правые повороты медленнее левых — еще один аспект, который был бы упущен на модели, не учитывающей особенности местоположения.
Чтобы запечатлеть уникальные свойства конкретных улиц, кварталов и городов, мы позволяем модели изучать иерархию представлений для областей разного размера с географией единицы временной шкалы (точное местоположение дороги или остановки), представленной в модели с помощью сумма вложений его расположения в различных масштабах. Сначала мы обучаем модель со все более высокими штрафами для более мелких участков с особыми случаями и используем результаты для выбора функций. Это гарантирует, что учитываются мелкозернистые элементы в достаточно сложных областях, где расстояние в сто метров влияет на поведение автобуса, в отличие от открытой сельской местности, где такие мелкие элементы редко имеют значение.
Во время обучения мы также моделируем возможность последующих запросов об областях, которых не было в обучающих данных. В каждом пакете обучения мы берем случайный фрагмент примеров и отбрасываем географические особенности ниже шкалы, случайно выбранной для каждого из них. В некоторых примерах указан точный маршрут автобуса и улица, в других указаны только местоположения на уровне района или города, а в других вообще нет географического контекста. Это лучше подготовит модель для последующих запросов об областях, в которых у нас не хватало данных для обучения.Мы расширяем охват нашего учебного корпуса, используя анонимные выводы о поездках пользователей на автобусе из того же набора данных, который Google Maps использует для популярных моментов на предприятиях, трудностей с парковкой и других функций. Однако даже эти данные не включают большинство автобусных маршрутов в мире, поэтому наши модели должны надежно обобщаться на новые районы.
Изучение локальных ритмов
Различные города и районы также работают в разном ритме, поэтому мы позволяем модели комбинировать представление местоположения с сигналами времени.Автобусы имеют сложную зависимость от времени — разница между 18:30 и 18:45 во вторник может быть результатом сокращения часов пик в одних районах, напряженного обеда в других и полной тишины в сонном городе в других местах. Наша модель изучает встраивание сигналов местного времени дня и дня недели, которые, в сочетании с представлением местоположения, улавливают существенные местные вариации, такие как скопление людей на автобусных остановках в час пик, которые не наблюдаются из-за автомобильного движения.
Это вложение назначает 4-мерные векторы времени суток.В отличие от большинства внутренних компонентов нейронных сетей, четырех измерений почти достаточно для визуализации, поэтому давайте посмотрим, как модель распределяет время дня в трех из этих измерений с помощью художественного рендеринга ниже. Модель действительно узнает, что время циклично, помещая время в «петлю». Но эта петля — не просто плоский круг на циферблате. Модель изучает широкие изгибы, которые позволяют другим нейронам составлять простые правила, позволяющие легко отделить такие понятия, как «середина ночи» или «позднее утро», которые не характеризуются большим изменением поведения шины.С другой стороны, схемы вечерних поездок на работу в разные районы и города намного больше, и эта модель, похоже, создает более сложные «скомканные» схемы между 16:00 и 21:00, что позволяет делать более сложные выводы о времени часа пик в каждом городе.
| Представление времени модели (3 из 4 измерений) образует петлю, которую здесь можно представить как окружность часов. Временные окна, более зависящие от местоположения, такие как 16: 00–21: 00 и 7: 00–9: 00, становятся более сложными «комками», в то время как большие невыразительные окна, такие как 2–5 часов утра, изгибаются плоскими изгибами для более простых правил.(Концепция художника Уилла Касселлы с использованием текстур с сайта textures.com и HDRI с сайта hdrihaven.) |
Вместе с другими сигналами это временное представление позволяет нам предсказывать сложные модели, даже если мы сохраняем скорость автомобиля постоянной. Например, в 10-километровой поездке на автобусе по Нью-Джерси наша модель подбирается в обеденное время и в часы пик в будние дни:
Собираем все вместе
Когда модель полностью обучена, давайте посмотрим, что она узнала о поездке на автобусе в Сиднее выше.Если мы запустим модель на данных о дорожном движении за этот день, это даст нам зеленый прогноз, показанный ниже. Не все улавливает. Например, у него остановка на высоте 800 метров длится всего 10 секунд, хотя автобус останавливается не менее 31 секунды. Но мы остаемся в пределах 1,5 минут от реального движения автобуса, улавливая гораздо больше нюансов поездки, чем может дать нам только расписание или время вождения автомобиля.
Путешествие вперед
Чего сейчас нет в нашей модели? Само расписание автобусов. Пока что в экспериментах с официальным расписанием автобусов агентства наши прогнозы существенно не улучшились.В некоторых городах сильные колебания движения могут помешать попыткам составить расписание. В других случаях расписание автобусов может быть точным, но, возможно, потому, что транспортные агентства тщательно учитывают схемы движения. И мы делаем это из данных.
Мы продолжаем экспериментировать с более эффективным использованием ограничений расписания и многих других сигналов для более точного прогнозирования и облегчения для наших пользователей планирования своих поездок. Надеемся, мы будем вам полезны и на вашем пути. Удачных путешествий!
Благодарности
Эта работа была совместной работой Джеймса Кука, Алекса Фабриканта, Ивана Кузнецова и Фанчжоу Сюй из Google Research, а также Энтони Бертука, Джулиана Гиббонса, Тьерри Ле Буленге, Кайдена Мейера, Анатолия Плотникова и Ивана. Волосюк на Google Maps.Мы благодарим Сенаку Бутпитию, Да-Ченг Хуана, Рубена Кана, Рамеша Нагараджана, Эндрю Томкинса и большую команду Transit за поддержку и полезные обсуждения; а также Уиллу Касселле за вдохновенное переосмысление стиля встраивания модели. Мы также в долгу перед нашими партнерскими агентствами за предоставление фидов данных о транзите, на которых обучается система.
Автор: Алекс Фабрикант, научный сотрудник Google Research
Сотни миллионов людей во всем мире ежедневно пользуются общественным транспортом, и более половины транзитных поездок в мире связаны с автобусами.Поскольку города мира продолжают расти, пассажиры хотят знать, когда ожидать задержек, особенно в автобусах, которые часто задерживаются движением транспорта. Хотя маршруты общественного транспорта, предоставляемые Google Maps, сообщаются многими транспортными агентствами, которые предоставляют данные в режиме реального времени, многие агентства не могут предоставить их из-за технических и ресурсных ограничений.
Сегодня Google Maps представил данные о задержках движения автобусов в реальном времени, прогнозируя задержки автобусов в сотнях городов по всему миру, от Атланты до Загреба, от Стамбула до Манилы и многих других.Это повышает точность определения времени транзита для более чем шестидесяти миллионов человек. Эта система, впервые запущенная в Индии три недели назад, основана на модели машинного обучения, которая объединяет прогнозы автомобильного движения в реальном времени с данными об автобусных маршрутах и остановках, чтобы лучше предсказать, сколько времени займет поездка на автобусе.
Начало модели
Во многих городах, где нет прогнозов в реальном времени от транспортных агентств, мы слышали от опрошенных пользователей, что они использовали умный обходной путь для приблизительной оценки задержки автобусов: использование маршрутов проезда Google Maps.Но автобусы — это не просто большие машины. Они останавливаются на автобусных остановках; требуется больше времени для ускорения, замедления и поворота; а иногда даже иметь особые привилегии на дороге, например, полосы для движения автобусов.
В качестве примера рассмотрим поездку на автобусе в среду днем в Сиднее. Фактическое движение автобуса (синий) отстает на несколько минут от опубликованного расписания (черный). Скорость автомобильного движения (красный) действительно влияет на автобус, например, замедление на высоте 2000 метров, но длительная остановка на отметке 800 метров значительно замедляет движение автобуса по сравнению с автомобилем.
Для разработки нашей модели мы извлекли обучающие данные из последовательностей расположения автобусов с течением времени, полученные из потоковых данных транспортных агентств в режиме реального времени, и выровняли их со скоростью движения автомобилей на пути автобуса во время поездки. Модель разбита на последовательность единиц временной шкалы — посещения кварталов и остановок, каждая из которых соответствует отрезку временной шкалы автобуса, причем каждая единица прогнозирует продолжительность. Пара соседних наблюдений обычно охватывает множество единиц из-за нечастых отчетов, быстро движущихся автобусов и коротких кварталов и остановок.
Эта структура хорошо подходит для моделей нейронных последовательностей, подобных тем, которые недавно успешно применялись для обработки речи, машинного перевода и т. Д. Наша модель проще. Каждая единица прогнозирует свою продолжительность независимо, а окончательный результат — это сумма прогнозов для каждой единицы. В отличие от многих моделей последовательностей, нашей модели не нужно учиться комбинировать выходные данные модулей или передавать состояние через последовательность модулей. Вместо этого структура последовательности позволяет нам совместно (1) обучать модели длительности отдельных единиц и (2) оптимизировать «линейную систему», где каждая наблюдаемая траектория назначает общую продолжительность сумме множества единиц, которые она охватывает.
| Чтобы смоделировать поездку на автобусе (а), начинающуюся на синей остановке, модель (b) суммирует прогнозы задержки из единиц временной шкалы для синей остановки, трех сегментов дороги, белой остановки и т. д. |
Моделирование «Где»
Помимо задержек из-за дорожного движения, при обучении нашей модели мы также принимаем во внимание детали маршрута автобуса, а также сигналы о месте и времени поездки. Даже в небольшом районе модель должна по-разному переводить прогноз скорости автомобиля в скорость автобуса на разных улицах.На левой панели ниже мы выделяем цветом прогнозируемое соотношение скорости автомобиля и скорости автобуса для нашей модели для поездки на автобусе. Более красные и медленные участки могут соответствовать замедлению автобуса возле остановок. Что касается быстрого зеленого участка в выделенном поле, мы узнаем, глядя на него в StreetView (справа), что наша модель обнаружила полосу поворота только для автобусов. Кстати, этот маршрут проходит в Австралии, где правые повороты медленнее левых — еще один аспект, который был бы упущен на модели, не учитывающей особенности местоположения.
Чтобы запечатлеть уникальные свойства конкретных улиц, кварталов и городов, мы позволяем модели изучать иерархию представлений для областей разного размера с географией единицы временной шкалы (точное местоположение дороги или остановки), представленной в модели с помощью сумма вложений его расположения в различных масштабах. Сначала мы обучаем модель со все более высокими штрафами для более мелких участков с особыми случаями и используем результаты для выбора функций. Это гарантирует, что учитываются мелкозернистые элементы в достаточно сложных областях, где расстояние в сто метров влияет на поведение автобуса, в отличие от открытой сельской местности, где такие мелкие элементы редко имеют значение.
Во время обучения мы также моделируем возможность последующих запросов об областях, которых не было в обучающих данных. В каждом пакете обучения мы берем случайный фрагмент примеров и отбрасываем географические особенности ниже шкалы, случайно выбранной для каждого из них. В некоторых примерах указан точный маршрут автобуса и улица, в других указаны только местоположения на уровне района или города, а в других вообще нет географического контекста. Это лучше подготовит модель для последующих запросов об областях, в которых у нас не хватало данных для обучения.Мы расширяем охват нашего учебного корпуса, используя анонимные выводы о поездках пользователей на автобусе из того же набора данных, который Google Maps использует для популярных моментов на предприятиях, трудностей с парковкой и других функций. Однако даже эти данные не включают большинство автобусных маршрутов в мире, поэтому наши модели должны надежно обобщаться на новые районы.
Изучение локальных ритмов
Различные города и районы также работают в разном ритме, поэтому мы позволяем модели комбинировать представление местоположения с сигналами времени.Автобусы имеют сложную зависимость от времени — разница между 18:30 и 18:45 во вторник может быть результатом сокращения часов пик в одних районах, напряженного обеда в других и полной тишины в сонном городе в других местах. Наша модель изучает встраивание сигналов местного времени дня и дня недели, которые, в сочетании с представлением местоположения, улавливают существенные местные вариации, такие как скопление людей на автобусных остановках в час пик, которые не наблюдаются из-за автомобильного движения.
Это вложение назначает 4-мерные векторы времени суток.В отличие от большинства внутренних компонентов нейронных сетей, четырех измерений почти достаточно для визуализации, поэтому давайте посмотрим, как модель распределяет время дня в трех из этих измерений с помощью художественного рендеринга ниже. Модель действительно узнает, что время циклично, помещая время в «петлю». Но эта петля — не просто плоский круг на циферблате. Модель изучает широкие изгибы, которые позволяют другим нейронам составлять простые правила, позволяющие легко отделить такие понятия, как «середина ночи» или «позднее утро», которые не характеризуются большим изменением поведения шины.С другой стороны, схемы вечерних поездок на работу в разные районы и города намного больше, и эта модель, похоже, создает более сложные «скомканные» схемы между 16:00 и 21:00, что позволяет делать более сложные выводы о времени часа пик в каждом городе.
| Представление времени модели (3 из 4 измерений) образует петлю, которую здесь можно представить как окружность часов. Временные окна, более зависящие от местоположения, такие как 16: 00–21: 00 и 7: 00–9: 00, становятся более сложными «комками», в то время как большие невыразительные окна, такие как 2–5 часов утра, изгибаются плоскими изгибами для более простых правил.(Концепция художника Уилла Касселлы с использованием текстур с сайта textures.com и HDRI с сайта hdrihaven.) |
Вместе с другими сигналами это временное представление позволяет нам предсказывать сложные модели, даже если мы сохраняем скорость автомобиля постоянной. Например, во время 10-километровой поездки на автобусе по Нью-Джерси наша модель выбирает толпу в обеденное время и часы пик в будние дни:
Собираем все вместе
После того, как модель полностью обучена, давайте посмотрим, что она узнала об автобусе в Сиднее. ездить выше.Если мы запустим модель на данных о дорожном движении за этот день, это даст нам зеленый прогноз, показанный ниже. Не все улавливает. Например, у него остановка на высоте 800 метров длится всего 10 секунд, хотя автобус останавливается не менее 31 секунды. Но мы остаемся в пределах 1,5 минут от реального движения автобуса, улавливая гораздо больше нюансов поездки, чем может дать нам только расписание или время вождения автомобиля.
The Trip Ahead
Одна вещь, которой сейчас нет в нашей модели? Само расписание автобусов. Пока что в экспериментах с официальным расписанием автобусов агентства наши прогнозы существенно не улучшились.В некоторых городах сильные колебания движения могут помешать попыткам составить расписание. В других случаях расписание автобусов может быть точным, но, возможно, потому, что транспортные агентства тщательно учитывают схемы движения. И мы делаем это из данных.
Мы продолжаем экспериментировать с более эффективным использованием ограничений расписания и многих других сигналов для более точного прогнозирования и облегчения для наших пользователей планирования своих поездок. Надеемся, мы будем вам полезны и на вашем пути. Удачных путешествий!
Благодарности
Эта работа была совместной работой Джеймса Кука, Алекса Фабриканта, Ивана Кузнецова и Фанчжоу Сюй из Google Research, а также Энтони Бертука, Джулиана Гиббонса, Тьерри Ле Буленге, Кайдена Мейера, Анатолия Плотникова и Ивана. Волосюк на Google Maps.Мы благодарим Сенаку Бутпитию, Да-Ченг Хуана, Рубена Кана, Рамеша Нагараджана, Эндрю Томкинса и большую команду Transit за поддержку и полезные обсуждения; а также Уиллу Касселле за вдохновенное переосмысление стиля встраивания модели. Мы также в долгу перед нашими партнерскими агентствами за предоставление фидов данных о транзите, на которых обучается система.
арабов по всему Израилю протестуют против столкновений в Иерусалиме; копы блокируют автобусы до Храмовой горы
арабских израильтян протестовали по всей стране в субботу в связи с действиями правительства в Иерусалиме, в том числе по поводу того, как оно отреагировало на крупные жестокие столкновения на Храмовой горе в пятницу и возможное выселение десятков палестинцев из района Восточного Иерусалима.
В целом ряде населенных пунктов прошли преимущественно мирные акции протеста. Протестующие ненадолго заблокировали движение на участке шоссе 65 на севере Израиля. Пять человек были задержаны в Умм-эль-Фахме на севере по подозрению в том, что они бросали камни возле городского полицейского участка. В Восточном Иерусалиме два человека были арестованы по подозрению в том, что они бросали камни в полицейских.
Несколько автобусов, перевозивших израильских арабов на Храмовую гору Иерусалима, были задержаны на полицейском контрольно-пропускном пункте на главном шоссе Route 1 за пределами города, который готовился к дальнейшему насилию после того, как в пятницу произошли одни из самых страшных столкновений за последние годы.Субботняя ночь — это Лейлат аль-Кадр, самая священная ночь мусульманского священного месяца Рамадан. Прихожане собирались собираться на ночную молитву в мечети Аль-Акса.
Движение вызвало массовые пробки в обоих направлениях на главной магистрали, ведущей в столицу.
На видео видно, как пассажиры выходят из автобусов и идут по шоссе, при этом некоторые блокируют движение в обоих направлениях.
Получите ежедневное издание The Times of Israel
по электронной почте и никогда не пропустите наши главные новости
Регистрируясь, вы соглашаетесь с условиями
Полиция заявила, что остановила автобусы, потому что у них была разведка, указывающая на то, что некоторые из пассажиров планировали устроить беспорядки на Храмовой горе.Они сказали, что только «подозрительные» пассажиры будут вынуждены сесть, а остальным будет разрешено ехать дальше. В конечном итоге завалы были открыты примерно через три часа.
איך ההחלטה לעצור את האוטובוסים עזרה לשמור על הסדר הציבורי? ות צועדים על כביש 1 וקוראים: «ברוח ודם נפדה את אל-אקצא» pic.twitter.com/aVmT5UMGGB
— Inbar Tvizer ענבר טויזר (@inbartvizer) 8 мая 2021 г.
Решение об остановке автобусов вызвало резкое осуждение со стороны арабских депутатов.Кнессета «Мерец» Иссави Фрей обвинила полицию в том, что она «помешала тысячам израильских мирных жителей отметить самую священную ночь в исламе, Лейлат аль-Кадр… пытаясь помешать им участвовать в одном из самых важных событий в исламе». Он обвинил власти в том, что они «с одной стороны позволили [Итамару] Бен Гвиру устроить провокации в Шейх-Джарре, а с другой — не позволили гражданам-мусульманам добраться до Аль-Аксы. Они не пытаются успокоить, а разжигают их ».
В четверг вечером представитель религиозного сионизма Бен Гвир, крайне правый активист, установил то, что он назвал парламентским офисом, в районе Восточного Иерусалима — стол под навесом с табличкой — в ответ на то, что, по его словам, было отсутствие защиты для еврейских семей в этом районе.За этим последовали ожесточенные столкновения между еврейскими и арабскими жителями в этом районе.
Член парламента от лейбористов Ибтисам Марана написал в Твиттере, что полиция «ужасно препятствует свободе религии и свободе передвижения стольких граждан».
Тем временем в субботу вечером еврейские демонстранты маршировали через мусульманский квартал Старого города Иерусалима с песнопениями, явно демонстрируя силу местным жителям.
רה שעוצרת מתפללים וחוסמת את כביש מס 1 ביום משמעותי לקראת סוף הרמאדן אבל רת את תהלוכות האלה ברובע המוסלמי הילי ו ו ואו גם וגם. https://t.co/ypif5nmx3c
— נדב איל Надав Эял (@Nadav_Eyal) 8 мая 2021 г.
Начальник полиции Иерусалимского округа Дорон Тургеман предсказал в субботу, что будут попытки спровоцировать насилие в городе после того, как в пятницу вечером на Храмовой горе вспыхнули крупные столкновения между полицией и верующими мусульманами на фоне растущей израильско-палестинской напряженности и по мере того, как Рамадан подходит к концу.
«Мы не допустим беспорядков», — цитирует его слова Kan news.
В пятницу в Иерусалиме произошло самое жестокое насилие за многие годы: 200 палестинцев и 17 израильских полицейских были ранены.
Полиция и военные готовились к новой вспышке насилия в субботу и были в повышенной готовности в Восточном Иерусалиме, на Западном берегу и на границе с сектором Газа, где вечером ожидались массовые протесты.
По данным газеты Haaretz, полиция считает, что столкновения на Храмовой горе были организованы боевиками ХАМАС, и связала недавнее насилие на святом месте Иерусалима с решением президента Палестинской автономии Махмуда Аббаса отложить на неопределенный срок выборы в законодательные органы, которые были назначены на более позднее время. месяц.
Бывший премьер-министр Эхуд Ольмерт сказал Kan News в субботу, что «назревает своего рода интифада, которую можно предотвратить». Он предупредил о «крайних элементах еврейского населения, которые раздувают огонь и усугубляют проблему [в Шейх-Джаррахе], которую необходимо решать в судебном порядке».
Сотни израильских арабов маршируют по Маршруту 1, направляясь в Иерусалим, 8 мая 2021 г. (Новм Ревкин Фентон / Flash90)
В субботу министр обороны Бенни Ганц провел оценку ситуации с безопасностью с высокопоставленными представителями вооруженных сил, полиции и Шин Бет.В конце встречи ЦАХАЛ заявил, что будет усиление численности войск в рамках подготовки к потенциальной эскалации.
«Нельзя допустить, чтобы экстремисты с обеих сторон вызывали эскалацию ситуации», — говорится в заявлении Ганца. «Израиль будет продолжать действовать, чтобы сохранить свободу вероисповедания на Храмовой горе и в то же время не позволить террору поднять голову или нарушить общественный порядок».
Комиссар полиции Коби Шабтай также провел специальную оценку безопасности в свете недавней напряженности в Иерусалиме.
В заявлении полиции говорится, что Шабтай приказал командирам, в частности в районе Иерусалима, «значительно» усилить свои силы перед самой священной ночью Рамадана в субботу вечером и «еще одной серией ожидаемых событий в ближайшие дни». Очевидно, речь шла о Дне Иерусалима, национальном празднике, который начинается в воскресенье вечером, когда Израиль празднует объединение Иерусалима, а религиозные националисты проводят парады и другие торжества в городе.
«Я подчеркиваю, что право на протест будет сохранено, но на беспорядки будет решительно и с нулевой терпимостью.Я призываю всех действовать ответственно и сдержанно », — цитируется в заявлении Шабтай.
Ожидается, что
палестинцев в секторе Газа и израильских арабов проведут массовые акции протеста в субботу после вспышек насилия в Иерусалиме в пятницу вечером.
Палестинцы в масках готовятся к запуску зажигательных шаров через северную границу Газы в сторону Израиля 8 мая 2021 г. (МОХАММЕД АБЕД / AFP)
В субботу на юге Израиля произошло не менее 10 пожаров, вызванных воздушными шарами с зажигательными устройствами.Сообщений о травмах или опасности для близлежащих городов не поступало.
Официальное СМИ террористической группировки ХАМАС сообщило, что в субботу группы, базирующиеся в Газе, призывали к демонстрациям у границы с Израилем в знак протеста против действий Израиля в Иерусалиме.
В последние дни палестинцы провели демонстрации в районе Шейх-Джарра в Восточном Иерусалиме. Более 70 палестинских жителей находятся под угрозой выселения и могут быть заменены правыми еврейскими националистами в судебной тяжбе, которая ведется в судебной системе Израиля.
Израильский суд приказал семьям уехать, поскольку до 1948 года эта собственность принадлежала еврейской религиозной ассоциации. Израильский закон 1970 года позволяет евреям требовать возврата собственности в Восточном Иерусалиме до того, как она попала в руки Иордании; подобного закона для палестинцев не существует.
Израильские силы проводят обыск в районе Шейх-Джарра в восточном Иерусалиме, 7 мая 2021 г. (AP Photo / Mahmoud Illean)
палестинца и их сторонники каждую ночь протестовали против предстоящих выселений.Полиция пыталась разогнать протестующие с помощью светошумовых гранат и водомётов, что привело к ранениям и арестам.
Семьи обратились в Верховный суд Израиля с просьбой рассмотреть апелляцию, которую он должен подать в понедельник.
Кроме того, в начале Рамадана палестинцы неоднократно вступали в столкновения с израильской полицией в Иерусалиме в знак протеста против ограничений в районе Дамасских ворот. В палестинских социальных сетях также были распространены некоторые видеоролики, на которых молодые арабские мужчины нападают на ультраортодоксальных прохожих.
В ответ сотни еврейских экстремистов прошли маршем по центру Иерусалима, скандируя «Смерть арабам». Другие беспорядочно нападали на палестинцев по всему городу. Затем это привело к ожесточенным столкновениям между полицией, евреями и арабами в городе.
«440» (DTC) Маршрут и расписание городского автобуса Дели, карта маршрута DTC 440, первый и последний автобус
Городской автобусный маршрут Дели № 440 , управляемый DTC (Транспортная корпорация Дели), ежедневно курсирует несколько городских автобусов между выходом 2 железнодорожного вокзала Нью-Дели и терминалом Амбедкар Нагар .
DTC — один из крупнейших в мире операторов автобусных перевозок, работающих на КПГ, который соединяет почти все части Дели и NCR (Национальный столичный регион) своей огромной сетью автобусов.
Городской автобус DTC 440 маршрута выполняет около 35 рейсов каждый день (в одну сторону) и проезжает через 51 автобусную остановку во время поездки в одну сторону.
Снимок маршрута № 440 городского автобуса Дели (DTC)
DTC Автобус № 440 (от терминала Амбедкар Нагар до → Ворота 2 железнодорожного вокзала Нью-Дели) Маршрут и расписание
| Номер остановки | Название автобусной остановки | Время первого автобуса |
|---|---|---|
| 1 | Терминал Амбедкар Нагар | 7:54 |
| 2 | Депо Амбедкар Нагар | 7:54 |
| 3 | Ханпур село | 7:56 |
| 4 | G Блок Дакшин Пури | 7:56 |
| 5 | Девли Перекресток | 7:57 |
| 6 | Ваюсенабад (Тигри) | 7:58 |
| 7 | Больница Батра / Сатья Нараян Мандир | 8:00 |
| 8 | Хамдард Нагар / Сангам Вихар | 8:01 |
| 9 | Больница Маджидиа | 8:03 |
| 10 | Библиотека Хамдарда | 8:04 |
| 11 | Гуру Рави Дас Мандир | 8:05 |
| 12 | Тара Квартира | 8:07 |
| 13 | Д.Д.А. Квартира Kalkaji | 8:09 |
| 14 | Хануман Мандир | 8:10 |
| 15 | Блок D.D.A. Квартира Kalkaji | 8:10 |
| 16 | Автобусная остановка Govindpuri Extension | 8:11 |
| 17 | Рампури | 8:11 |
| 18 | Говинд Пури Гали Номер 5 | 8:13 |
| 19 | G Блок Калка Джи | 8:14 |
| 20 | Колледж Деш Бандху | 8:15 |
| 21 | Б Блок Калка Джи | 8:17 |
| 22 | Nehru Place | 8:18 |
| 23 | Сант Нагар | 8:21 |
| 24 | Колония Кайлаш | 8:23 |
| 25 | Л.S.R. Колледж | 8:25 |
| 26 | Центральная школа | 8:27 |
| 27 | Эндрюс Гандж | 8:29 |
| 28 | P.T. Колледж (Котла) | 8:31 |
| 29 | Оборонительная колония (Гомеопатический колледж) | 8:31 |
| 30 | Рынок Сухдева Котла | 8:32 |
| 31 | Эстакада Сева Нагар | 8:34 |
| 32 | Дж.Стадион Л. Неру | 8:36 |
| 33 | Central School Lodhi Road | 8:37 |
| 34 | Колониальный блок Лодхи 12 и 13 | 8:38 |
| 35 | 18 Блок Лодхи Колония | 8:39 |
| 36 | Уголок Лодхи | 8:41 |
| 37 | Макс Мюллер Марг | 8:43 |
| 38 | Равиндра Нагар | 8:44 |
| 39 | Хан Рынок | 8:45 |
| 40 | Sujan Singh Park | 8:45 |
| 41 | Автобусная остановка Хан Маркет | 8:46 |
| 42 | Shahjahan Road U.P.S.C. | 8:48 |
| 43 | Барода Хаус | 8:52 |
| 44 | Бхаратия Видья Бхаван | 8:54 |
| 45 | Макс Мюллер Бхаван | 8:55 |
| 46 | Scindia House 1 | 8:57 |
| 47 | Парк Шиваджи | 9:01 |
| 48 | Вивекананд Марг | 9:02 |
| 49 | Номер выхода на железнодорожный вокзал Нью-Дели | 9:02 |
| 50 | Полицейский участок Рынок Камла | 9:03 |
| 51 | Ворота 2 железнодорожного вокзала Нью-Дели | 9:04 |
Когда вы путешествуете на городском автобусе 440 от терминала Амбедкар Нагар в направлении (→) Ворота 2 железнодорожного вокзала Нью-Дели, первый автобус отправляется в 7:54 утра , а последний автобус — в 20:50 от автобусной остановки Ambedkar Nagar Terminal.DTC выполняет в общей сложности из 35 ежедневных рейсов от терминала Амбедкар Нагар в сторону выхода 2 железнодорожного вокзала Нью-Дели.
Расписание движения автобусов от терминала Амбедкар Нагар до (→) выхода 2 железнодорожного вокзала Нью-Дели
- Первый автобус
- 7:54
- 8:10
- 8:30
- 8:42
- 8:50
- 8:58
- 9:14
- 9:46
- 10:18 утра
- 10:34 утра
- 10:50
- 11:22
- 11:38
- 12:45
- 14:05
- 14:58
- 15:14
- 15:38
- 15:46
- 16:02
- 16:18
- 16:34
- 17:06
- 17:22
- 17:32
- 18:26
- 18:42
- 18:58
- 19:06
- 19:18
- 19:30
- 19:46
- 20:02
- 20:34
- 20:50
- Последний автобус
Хотите знать расписание всех остальных автобусных остановок этого маршрута и направления? Пожалуйста, проверьте то же самое по адресу: Маршрут 440 Расписание от промежуточных автобусных остановок до выхода 2 железнодорожного вокзала Нью-Дели.
ОБРАТНЫЙ МАРШРУТ: автобус DTC № 440 (выход 2 железнодорожного вокзала Нью-Дели до → терминал Амбедкар Нагар. Маршрут и расписание
.
| № остановки | Название автобусной остановки | Время первого автобуса |
|---|---|---|
| 1 | Ворота 2 железнодорожного вокзала Нью-Дели | 7:46 |
| 2 | Вивекананд Марг | 7:47 |
| 3 | Парк Шиваджи | 7:48 |
| 4 | Супер Базар | 7:50 |
| 5 | Кайлас Дом | 7:51 |
| 6 | Макс Мюллер Бхаван | 7:53 |
| 7 | Бхаратия Видья Бхаван | 7:55 |
| 8 | Барода Хаус | 7:57 |
| 9 | Национальный стадион | 7:59 |
| 10 | Художественная галерея | 8:00 |
| 11 | Shahjahan Road U.P.S.C. | 8:02 |
| 12 | Современная младшая школа имени Рагхубира Сингха | 8:04 |
| 13 | Humayun Road | 8:05 |
| 14 | Хан Рынок | 8:06 |
| 15 | Sujan Singh Park | 8:06 |
| 16 | Равиндра Нагар | 8:08 |
| 17 | Макс Мюллер Марг | 8:10 |
| 18 | Уголок Лодхи | 8:11 |
| 19 | 18 Блок Лодхи Колония | 8:13 |
| 20 | Колониальный блок Лодхи 12 и 13 | 8:14 |
| 21 | Central School Lodhi Road | 8:15 |
| 22 | Дж.Стадион Л. Неру | 8:16 |
| 23 | Эстакада Сева Нагар | 8:18 |
| 24 | Рынок Сухдева Котла | 8:19 |
| 25 | Оборонительная колония (Гомеопатический колледж) | 8:20 |
| 26 | P.T. Колледж (Котла) | 8:21 |
| 27 | Эндрюс Гандж | 8:24 |
| 28 | Центральная школа | 8:26 |
| 29 | Колледж Леди Шри Рам | 8:27 |
| 30 | Колония Кайлаш | 8:30 |
| 31 | Сант Нагар | 8:31 |
| 32 | Nehru Place | 8:33 |
| 33 | Nehru Place Апартаменты | 8:35 |
| 34 | Южный парк Апартаменты CR Park | 8:37 |
| 35 | Д.Б. Колледж | 8:39 |
| 36 | Рампури Гали Номер 13 | 8:42 |
| 37 | Govindpuri Extension Gali Number 16 | 8:42 |
| 38 | Блок D.D.A. Квартира Kalkaji | 8:43 |
| 39 | Калкаджи Д.Д.А. Рынок | 8:43 |
| 40 | D.D.A. Квартира Kalkaji | 8:44 |
| 41 | Тара квартира автобусная остановка | 8:46 |
| 42 | Гуру Рави Дас Мандир | 8:48 |
| 43 | Библиотека Хамдарда | 8:49 |
| 44 | Больница Маджидиа | 8:50 |
| 45 | Хамдард Нагар / Сангам Вихар | 8:51 |
| 46 | Больница Батра / Сатья Нараян Мандир | 8:53 |
| 47 | Ваюсенабад (Тигри) | 8:55 |
| 48 | Ханпур добавочный номер | 8:56 |
| 49 | Девли Перекресток | 8:57 |
| 50 | Депо Амбедкар Нагар | 8:59 |
| 51 | Терминал Амбедкар Нагар | 8:59 |
В обратном направлении, при поездке 440 №городской автобус от выхода 2 железнодорожного вокзала Нью-Дели в сторону (→) терминала Амбедкар Нагар, первый автобус DTC отправляется в 7:46 утра и последний автобус отправляется в 22:18 вечера от автобусной остановки выхода 2 железнодорожного вокзала Нью-Дели. Delhi Transport Corporation выполняет в общей сложности 40 ежедневных рейсов от выхода 2 железнодорожного вокзала Нью-Дели в сторону терминала Амбедкар Нагар.
Расписание движения автобусов от выхода 2 железнодорожного вокзала Нью-Дели до (→) терминала Амбедкар Нагар
- Первый автобус
- 7:46
- 8:05
- 8:18
- 8:34
- 8:50
- 9:22
- 9:38
- 10:02
- 10:15 утра
- 10:26 утра
- 10:34 утра
- 10:42 утра
- 11:14 утра
- 11:30
- 11:46
- 12:02
- 12:15
- 12:50
- 13:30
- 15:30
- 16:26
- 16:42
- 17:06
- 17:18
- 17:30
- 17:46
- 18:02
- 18:34
- 18:50
- 19:08
- 19:54
- 20:10
- 20:26
- 20:34
- 20:46
- 20:58
- 21:14
- 21:30
- 22:02
- 22:18
- Последний автобус
Хотите знать расписание всех остальных автобусных остановок этого маршрута и направления? Пожалуйста, проверьте то же самое по адресу: Маршрут 440 Расписание от промежуточных автобусных остановок до терминала Амбедкар Нагар.
KL-800A CAN BUS Система автотронного обучения
Система автотронного обучения KL-800A CAN BUS представляет собой распределенную систему управления, поддерживаемую усовершенствованной системой последовательной шины CAN (сеть контроллеров). CAN — это шина с несколькими ведущими устройствами с открытой линейной структурой с одной линией шины и равными узлами. Количество узлов протоколом не ограничено.
Каждый модуль системы KL-800A является ЭБУ или взаимодействующим устройством (узлом) на CAN-шине.Передача данных между модулями осуществляется микроконтроллерами по шине CAN. Когда сигналы и данные отправляются на персональный компьютер, компьютерная система мониторинга отображает текущее состояние и данные модуля на экране ПК и включает сигнальную лампу, если что-то не так.
Система KL-800A может моделировать работу системы впрыска топлива, системы зажигания и управления выхлопными газами. Эксперименты включают характеристики и работу различных датчиков и исполнительных механизмов, используемых в автомобилях.
Датчики частоты вращения двигателя Эксперимент 1
Эксперимент 2 Датчики воздушного потока
Эксперимент 3 Датчик положения дроссельной заслонки
Эксперимент 4 Датчик температуры охлаждающей жидкости
Кислородный датчик эксперимента 5
Эксперимент 6 Датчик скорости автомобиля
Эксперимент 7: переключатель третьей передачи
Эксперимент 8 Переключатель Парковка / Нейтраль
Эксперимент 9 Переключатель кондиционирования воздуха
Эксперимент 10 Реле давления в гидроусилителе руля
Цепь инжектора эксперимента 11
Эксперимент 12: система зажигания с компьютерным управлением.
Эксперимент 13 Цепь реле охлаждающего вентилятора
Эксперимент 14 Цепь реле топливного насоса
Эксперимент 15 Цепь реле компрессора кондиционера
Эксперимент 16, регулирующий клапан холостого хода
Муфта гидротрансформатора Experiment 17
Клапан продувки угольного баллона в эксперименте 18
Эксперимент 19 Клапан рециркуляции выхлопных газов
Эксперимент 20 Автомобильный компьютер
1.CAN-совместимые модули могут быть легко соединены между собой с помощью 9-контактных разъемов D-sub и кабелей. Эти модули могут взаимодействовать друг с другом.
2. Удобный графический интерфейс позволяет пользователю отображать модули и управлять ими на экране ПК.
3. Каждый модуль оснащен переключателями моделирования неисправностей для практического устранения неисправностей.
Два болельщика «Манчестер Юнайтед» арестованы, и автобус команды «Ливерпуль» ЗАБЛОКИРОВАН, поскольку 2 000 спустились на Олд Траффорд в связи с протестом против Глейзеров
ДВА человека были арестованы, а автобус команды «Ливерпуль» был ЗАБЛОКИРОВАН, поскольку около 2 000 «Манчестер Юнайтед» спустились на Олд Траффорд в знак протеста против Глейзеров. право собственности.
Болельщики «красных дьяволов» во второй раз за 11 дней попытались сорвать схватку в Премьер-лиге со своими непримиримыми соперниками, заблокировав тренера «Ливерпуля» и даже опустив ему шины.
7
Болельщики «Манчестер Юнайтед» ЗАБЛОКИРОВАЛИ автобус «Ливерпуля» перед игрой на «Олд Траффорд»
7
Около 2000 болельщиков «Юнайтед» снова собрались протестовать на «Олд Траффорд», двое из которых были арестованы за нарушение общественного порядкаКредит: Reuters
7
Поклонники подняли плакаты с антистеклом Фото: Reuters
7
Фонарики и дымовые шашки были взорваны за пределами стадиона Фото: PA
7.
Поклонники в большом количестве появились в Театре мечты Фото: Гетти
В то время как за пределами стадиона дым Были подорваны гранаты и осветительные ракеты, и, как сообщается, были брошены бутылки, что еще больше свидетельствует о беспорядках, поскольку двое из них были арестованы за нарушение общественного порядка.
В заявлении полиции Большого Манчестера говорилось: «Нам известно о протестах, проходящих возле стадиона« Олд Траффорд », с небольшими группами людей, которые, по-видимому, намереваются сорвать мероприятие.
«Офицеры, обеспечивающие безопасность и способствующие соблюдению права на мирный протест. Два человека арестованы за нарушение общественного порядка».
На изображениях в социальных сетях запечатлен автомобиль, задержанный автомобилями на тихой дороге на фоне центра Манчестера.
Также было заявлено, что шины тренера были подведены.
На фотографиях видно, как к месту происшествия прибывает полиция, чтобы разогнать блокирующих красный автобус. Полицейские быстро остановили заявленных 50 протестующих, чтобы они больше не задерживали автомобиль.
На борту не было звезд Ливерпуля, а автобус, как известно, ехал, чтобы забрать команду из отеля Hyatt Regency, где они остановились.
Однако, когда он столкнулся с проблемой, вместо этого использовались резервные тренеры, чтобы отвезти Юргена Клоппа в Театр Мечты и сбросить протестующих с земли.
«Ливерпуль» в конечном итоге прибыл через черный ход незадолго до 19:00 — за час и 15 минут до начала матча — развеяв опасения по поводу второй отсрочки.
Оле Гуннар Сульшер и его команда «Юнайтед» уже прибыли ШЕСТЬ ЧАСОВ раньше, отсиживаясь в импровизированных спальнях в ложах для гостеприимства.
🗣 «У нас одна команда, надеюсь, у нас будет и Ливерпуль». @ Carra23 анонсирует «Манчестер Юнайтед» против «Ливерпуля» и рассказывает о текущем настроении вокруг картинки «Олд Траффорд».twitter.com/lxOjiQK527
— Football Daily (@footballdaily) 13 мая 2021 г.
Это была одна из многих мер безопасности, введенных после уродливых сцен полторы недели назад, когда игра была отменена.
Сверхсекретная операция по пресечению дальнейших протестов против Глейзера была запущена в начале недели, игроки поклялись хранить секретность, а некоторые сотрудники даже не вмешивались в происходящее, чтобы предотвратить утечки информации.
И «стальное кольцо» клуба было в значительной степени эффективным, без повторения насилия, когда фанаты штурмовали поле, а полицейский получил серьезные травмы лица.
Фанаты, собравшиеся у земли, тем не менее выпустили дымовые шашки и сигнальные ракеты, а Sky Sports также заявили, что некоторые метали бутылки.
Полиция в защитных шлемах блокировала входы, а сторонники размахивали транспарантами с лозунгами против Глейзера.
Конные котлы в конечном итоге отогнали фанатов от площадки, и игра началась, как и было запланировано, в 20:15.
7
Болельщики «Юнайтед» сделали свой голос услышанным Фото: AP
7
Полиция в защитных шлемах заблокировала входы на «Олд Траффорд» Фото: AP
«Юнайтед» взлетела, когда Бруно Фернандес обнаружил новичок благодаря злобному отражению защитника Ливерпуля Нэта Филлипса.
Однако «Ливерпуль» быстро взял под свой контроль удары Диого Йота и Роберто Фирмино, которые вывели вперед перед перерывом.
Фирмино и Мохамед Салах забили после перерыва, по обе стороны от ворот Маркуса Рашфорда, и закрепили заслуженную победу 4: 2 — и огромный толчок для четырех главных надежд красных.
Стальной ринг «Олд Траффорд» в полном составе, игроки «Манчестер Юнайтед» прибывают на матч «Ливерпуль» на семь часов раньше
Car Boat Судовой распределительный блок питания с 12 винтами 2 шпильки Блок распределения заземления MICTUNING 12 Комплект клеммной шины и крышка Монтажные аксессуары и жгуты Установка усилителя isoleringstrailer.dk
Комплект и крышка соединительной шины MICTUNING 12 | Блок распределения заземления — Клеммная колодка распределения питания на судне автомобиля Лодка с 12 винтами + 2 шпильки: MICTUNING® Direct. Купить комплект шинопровода MICTUNING 12 и крышка | Блок распределения заземления — Клеммная колодка распределения питания на судне с 12 винтами + 2 шпильки: Клеммы силового кабеля — ✓ Возможна БЕСПЛАТНАЯ ДОСТАВКА при определенных покупках. Высокая проводимость — шина из луженой меди, допускающая ток до 150 А. Непрерывный рейтинг: 130A AC / 150A DC; Максимальное напряжение: 300 В переменного тока / 48 В постоянного тока; Клеммный винт: M4 x 12; Клеммная шпилька: M6 x 2。 Организация проводов — 12 клеммных шинопроводов помогают организовать и очистить беспорядочную проводку, отлично подходят для всех типов распределения питания и заземления.Простота установки и удержания на месте с помощью монтажных отверстий на каждом конце。 Прозрачная защитная крышка — Прозрачная крышка из поликарбоната обеспечивает дополнительную защиту, защиту от брызг и пыли. Он защищает от случайного прикосновения к клемме.。 Превосходная долговечность — шпильки и винты из нержавеющей стали защищают от ржавчины и коррозии в море. Основание: огнестойкий пластик. Армированная стекловолокном нейлоновая основа с оптимальной механической прочностью и долговечностью。 Широкое применение — широко используется в автомобилях, морских судах, лодках, жилых автофургонах, мотоциклах, туристических транспортных средствах, грузовиках и т. Д.Идеально подходит для всех ваших проектов по электромонтажу。
Клеммная колодка распределения питания на судне на автомобиле с 12 винтами 2 шпильки Блок распределения заземления MICTUNING 12 Комплект шинопроводов и крышка
Жгут проводов Metra AWWHCR, вентиляционное отверстие / CD / лобовое стекло / приборная панель 8 Pack Volport MagicPlate с заменой клея 3M для магнитного автомобильного держателя телефона, подставки и подставки Металлическая пластина для телефона Магнит — прямоугольный и круглый VM0003US, Arkon Windshield Dash Phone Car Mount для iPhone X 8 7 6S Plus 8 7 6S Galaxy Note Edge 8 S8 S7 Retail Black SM679, подлинный высокоскоростной USB-адаптер TomTom с двумя зарядными устройствами, USB, GPS, 9UUC.001.22, Планшеты и другие USB-устройства Автомобильное зарядное устройство Galaxy TOLLEFE, 5-портовый автомобильный адаптер для зарядного устройства iPad Pro / Air 2 / Mini 31W 6.2A Автомобильное USB-зарядное устройство, совместимое с iPhone 12/11 / Xs Max / Max / X / XR / 8/7 / Плюс. Двойной шаровой адаптер RAM. Видеорегистратор G-Sensor для автомобилей 1080P FHD 2021 Автомобильная видеорегистратор для автомобилей CHORTAU 3-дюймовый видеорегистратор с ночным видением, монитор парковки с широкоугольной петлей для записи 170 °, адаптер для вторичных автомобильных навигационных блоков Подключение к штатной GPS-антенне Адаптер разъема SMA, 3 USB Multi Автомобильный порт для зарядки, совместимый с iPhone Xs / Max / XR / X / 8/8 Plus Galaxy S9 S8 S7 и другими гаджетами LAX LAX3PORTCAR-BLK Black LAX USB-адаптер для автомобильного зарядного устройства.Синий лазерный радар-детектор для автомобилей Режим города / шоссе Быстрая скорость Обнаружения на 360 градусов Комплект радар-детекторов со светодиодным дисплеем, двумя 10-дюймовыми вуферами и тремя твитерами Vi. Громкая связь для всех планшетов смартфонов Держатель сотового телефона MO-I для автомобильного мобильного телефона Крепление на приборной панели, синий динамик для душа Auto Tech, один месяц обслуживания в комплекте Agilis Systems MotoSafety MPAAS1P1 Mpaas1P1 OBD GPS Устройство слежения за автомобилем с приложением для телефона. HUHUTA Универсальное быстрое автомобильное зарядное устройство с 6-футовым зарядным устройством типа C Замена шнура кабеля для Samsung Galaxy S9 / S8 Google Pixel LG G6 V20 G5 Nexus 6P 5X Dual USB Автомобильный адаптер для зарядного устройства.SRX2.150 Memphis 2-канальный усилитель с максимальной среднеквадратичной мощностью 300 Вт. Антенный адаптер METRA 40EU10.
Автобус | Моя летняя машина вики
1982 Kutter 9 (Volvo B58 / Scania K112CL)
Максимальная скорость
110 км / ч (68 миль / ч)
(Кари не движется быстрее 80 км / ч (50 миль / ч))
Мощность двигателя
242 л.с. при 2200 об / мин
886 Н * м (653 фунт-фут) при 1400 об / мин
Тип двигателя
Дизель с турбонаддувом 9,6 л (9600 куб.
Коробка передач
6 ступенчатая МКПП, задний привод
Размер емкости
300 л (такой же, как Gifu, но бесконечность)
Топливо
расход
7.8 л / км (как Gifu, но бесконечность)
Автобус Bus в My Summer Car — это Kutter 9, произведенный в 1982 году. Это транспортное средство, управляемое NPC, которое движется по часовой стрелке по шоссе и завершает свое путешествие в Перяярви.
Билет на автобус стоит 25 мк. После оплаты игрок может сесть на любое место, нажав ⏎ , когда на экране появится значок пассажирского режима.
Автобус едет на довольно медленной скорости, медленнее, чем большинство автомобилей, встречающихся на шоссе.Над каждым сиденьем есть кнопки для остановки автобуса, если игрок хочет выйти на следующей остановке. В автобус также можно сесть на любой из автобусных остановок вдоль шоссе, автобус остановится, если персонаж игрока стоит на остановке.
Кари Лятанен, он же водитель автобуса
Водитель автобуса Кари Лятанен выглядит как мужчина средних лет в солнечных очках и синей форме водителя автобуса. У него короткие каштановые волосы и усы. Он также носит джинсы, похожие на джинсы Drunken Brawler.
Автобус курсирует весь день даже ночью по расписанию. Спереди, по бокам и сзади автобуса есть текст «Lätäsen Liikenne Oy», что в переводе означает «Транспортное предприятие Лятанена».
Автобусные остановки []
- Основная статья: Автобусная остановка
Автобус останавливается на следующих остановках:
Приборная панель автобуса
Peräjärvi. Это главная автобусная остановка. Здесь есть приют, и автобус останавливается здесь автоматически.
- Лоппе. Это небольшая автобусная остановка, есть только указатель остановки без приюта.
- Loppentie. Маленькая автобусная остановка, почти идентичная остановке Loppe.
- Rykipohja. Автобусная остановка побольше с автобусной остановкой.
Правила []
- Не выбрасывайте мусор в автобусе.
- Не употребляйте алкоголь в автобусе.
- Не курите сигареты в автобусе.
- Не показывать водителю неподобающие жесты.
- Не спамить кнопку остановки.
Несоблюдение этих правил может привести к вылету из автобуса.
Автобус часто блокирует движение по трассе
Общая информация []
- В отличие от всех других машин на шоссе, автобус появляется сразу после загрузки игры, а не когда игрок выезжает на шоссе.
- В автобусе есть два пассажира, у которых есть случайная вероятность появления.
- В автобусе используется звук двигателя старой версии от Gifu. (Раньше у них был одинаковый звук двигателя)
- Автобус получил наружные зеркала заднего вида и внутреннее зеркало (центральное) в 23.Обновление 12.2019.
- Автобус — один из немногих транспортных средств в игре с RR компоновкой.